Vous aimerez peut-être aussi
- FB Tutorial Migration Imaging Conditions 141201Document11 pagesFB Tutorial Migration Imaging Conditions 141201Leonardo Octavio Olarte SánchezPas encore d'évaluation
- Synthetic Seismogram PDFDocument3 pagesSynthetic Seismogram PDFOmar MohammedPas encore d'évaluation
- 2 - Volumetric Dip and AzimuthDocument20 pages2 - Volumetric Dip and AzimuthSagnik Basu RoyPas encore d'évaluation
- Residual Oil Saturation: The Information You Should Know About SeismicDocument9 pagesResidual Oil Saturation: The Information You Should Know About SeismicOnur AkturkPas encore d'évaluation
- Vertical Seismic Profiling (VSP) : Fig. 4.45 Areas To ConsiderDocument10 pagesVertical Seismic Profiling (VSP) : Fig. 4.45 Areas To ConsiderSakshi MalhotraPas encore d'évaluation
- TG Structural Interpretation Ganjil 20-21Document79 pagesTG Structural Interpretation Ganjil 20-21andaruPas encore d'évaluation
- Pe20m017 Vikrantyadav Modelling and InversionDocument18 pagesPe20m017 Vikrantyadav Modelling and InversionNAGENDR_006Pas encore d'évaluation
- Well-Tie Workflow: Matt Hall 7 CommentsDocument3 pagesWell-Tie Workflow: Matt Hall 7 CommentsMark MaoPas encore d'évaluation
- Why Spectral DecompositionDocument2 pagesWhy Spectral Decompositionanima1982Pas encore d'évaluation
- Seismic Wavelet Estimation - A Frequency Domain Solution To A Geophysical Noisy Input-Output ProblemDocument11 pagesSeismic Wavelet Estimation - A Frequency Domain Solution To A Geophysical Noisy Input-Output ProblemLeo Rius100% (1)
- Well (Log) Synthetic Seismograms and Ties To SeismicDocument19 pagesWell (Log) Synthetic Seismograms and Ties To SeismicAhmed ElmughrabiPas encore d'évaluation
- Avo1 PDFDocument395 pagesAvo1 PDFAnonymous zo3xKkWjPas encore d'évaluation
- Geomechanical Characterisation of Unconventional Reservoir 1669547621Document7 pagesGeomechanical Characterisation of Unconventional Reservoir 1669547621Mohamed AbbasPas encore d'évaluation
- What Kind of Vibroseis Deconvolution Is Used - Larry MewhortDocument4 pagesWhat Kind of Vibroseis Deconvolution Is Used - Larry MewhortBayu SaputroPas encore d'évaluation
- AVO Course 1Document46 pagesAVO Course 1AwangSsudPas encore d'évaluation
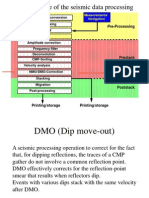
- Basic Scheme of The Seismic Data ProcessingDocument17 pagesBasic Scheme of The Seismic Data ProcessingEmma KokakuPas encore d'évaluation
- Seismic InversionDocument9 pagesSeismic InversionMuhammad ArslanPas encore d'évaluation
- Geophysics 224 Geophysical Exploration Techniques Final Exam Section Instructor Date Time AllowedDocument8 pagesGeophysics 224 Geophysical Exploration Techniques Final Exam Section Instructor Date Time AllowedSuraj KumarPas encore d'évaluation
- Petrel 2015 Whats New Ps PDFDocument4 pagesPetrel 2015 Whats New Ps PDFTroy ModiPas encore d'évaluation
- Velocity ModelDocument9 pagesVelocity ModelHumbang PurbaPas encore d'évaluation
- Seismic InterpretationDocument24 pagesSeismic InterpretationNguyễnTrườngPas encore d'évaluation
- Attribute Matrix 2010Document1 pageAttribute Matrix 2010iakk100% (1)
- Release NotesDocument152 pagesRelease Notestesttest3846Pas encore d'évaluation
- Basic ProcessingDocument86 pagesBasic ProcessingRazi AbbasPas encore d'évaluation
- Seismic Inversion: Reading Between The LinesDocument22 pagesSeismic Inversion: Reading Between The Linesdiditkusuma100% (1)
- Ho Times AttributesDocument54 pagesHo Times AttributesAnonymous iZx83pFsOrPas encore d'évaluation
- Imaging Passive Seismic DataDocument11 pagesImaging Passive Seismic DataJaenudin ZenPas encore d'évaluation
- CoherenceDocument95 pagesCoherencemayapppPas encore d'évaluation
- N. (Geophysics) : Seismic Record Noise FoldDocument84 pagesN. (Geophysics) : Seismic Record Noise FoldRazi AbbasPas encore d'évaluation
- Pre Stack Migration Aperture - An Overview: Dr. J.V.S.S Narayana Murty, T. ShankarDocument6 pagesPre Stack Migration Aperture - An Overview: Dr. J.V.S.S Narayana Murty, T. ShankarJVSSNMurty100% (1)
- AVO Inversion Course 5Document67 pagesAVO Inversion Course 5AwangSsudPas encore d'évaluation
- Rift Sequence StratigraphyDocument8 pagesRift Sequence StratigraphyprijayamPas encore d'évaluation
- The Seismic Inversion MethodDocument128 pagesThe Seismic Inversion Methodgodfrey edezuPas encore d'évaluation
- Fault Seal AnalysisDocument9 pagesFault Seal AnalysisBobby SiswantoPas encore d'évaluation
- AvoDocument16 pagesAvoshilpi10100% (1)
- HAGI 2021 - Slope of Spectral Amplitude - A Simple Yet Effective Hydrocarbon IndicatorDocument5 pagesHAGI 2021 - Slope of Spectral Amplitude - A Simple Yet Effective Hydrocarbon IndicatorAwalPas encore d'évaluation
- Time DepthDocument4 pagesTime DepthHcene HcenPas encore d'évaluation
- Effect of Seismic Wavelet Phase On Post Stack InversionDocument4 pagesEffect of Seismic Wavelet Phase On Post Stack InversionAz RexPas encore d'évaluation
- Editing of Input Data: Important Icons Used in The Process StepsDocument9 pagesEditing of Input Data: Important Icons Used in The Process StepsAnonymous qaI31H100% (1)
- LC-2 - Intro. To Seismic InterpretationDocument56 pagesLC-2 - Intro. To Seismic InterpretationWan SyahrulPas encore d'évaluation
- Amplitude Variation With Frequency As Direct Hydrocarbon Indicator For Quick Look and Different Insight of Hydrocarbon DelineationDocument7 pagesAmplitude Variation With Frequency As Direct Hydrocarbon Indicator For Quick Look and Different Insight of Hydrocarbon DelineationAwalPas encore d'évaluation
- Amplitude Contrast and Edge Enhancement For Fault Delineation in Seismic DataDocument1 pageAmplitude Contrast and Edge Enhancement For Fault Delineation in Seismic DataAnonymous VWxmb93BlK100% (1)
- Use of Seismic Attributes For Sediment Classificat PDFDocument15 pagesUse of Seismic Attributes For Sediment Classificat PDFZarethPas encore d'évaluation
- 002 M3 Import 2007 PotsdamDocument22 pages002 M3 Import 2007 PotsdamJuan Ignacio BoggettiPas encore d'évaluation
- Constrained Rock Physics Modeling: SPECIALSECTION: Rock Physics Rock Physics SPECIALSECTION: Rock PhysicsDocument5 pagesConstrained Rock Physics Modeling: SPECIALSECTION: Rock Physics Rock Physics SPECIALSECTION: Rock PhysicsIftikhar Satti100% (1)
- Synthetic Seismogram: ObjectivesDocument24 pagesSynthetic Seismogram: ObjectivesdhiaaPas encore d'évaluation
- Fundamental of Seismic Genap 2013-2014 TGDocument66 pagesFundamental of Seismic Genap 2013-2014 TGFandy MuhammadPas encore d'évaluation
- Petroleum Geology & Geophysics: Prediction Model SeismicDocument19 pagesPetroleum Geology & Geophysics: Prediction Model SeismicMirza Muhammad YudhistiraPas encore d'évaluation
- 6 Noise and Multiple Attenuation PDFDocument164 pages6 Noise and Multiple Attenuation PDFFelipe CorrêaPas encore d'évaluation
- Effective AVO Crossplot ModelingDocument12 pagesEffective AVO Crossplot ModelingroyPas encore d'évaluation
- Geometrical AttributesDocument129 pagesGeometrical AttributesMirza Ali100% (1)
- Techniques and Methods of Seismic Data PDocument24 pagesTechniques and Methods of Seismic Data PtomislavPas encore d'évaluation
- Phase - I Seismic Data Acquisition Phase - II Seismic Data Processing Phase - III Seismic Data InterpretationDocument27 pagesPhase - I Seismic Data Acquisition Phase - II Seismic Data Processing Phase - III Seismic Data InterpretationMajid AliPas encore d'évaluation
- GEO ExPro - Geophysics - A Simple Guide To Seismic Amplitudes and DetuningDocument11 pagesGEO ExPro - Geophysics - A Simple Guide To Seismic Amplitudes and DetuningsolomonPas encore d'évaluation
- Band Limited Impedance Inversion of Blackfoot Field, Alberta, CanadaDocument6 pagesBand Limited Impedance Inversion of Blackfoot Field, Alberta, CanadaSatya PrakashPas encore d'évaluation
- Deepwater Sedimentary Systems: Science, Discovery, and ApplicationsD'EverandDeepwater Sedimentary Systems: Science, Discovery, and ApplicationsJon R. RotzienPas encore d'évaluation
- Modeling of Resistivity and Acoustic Borehole Logging Measurements Using Finite Element MethodsD'EverandModeling of Resistivity and Acoustic Borehole Logging Measurements Using Finite Element MethodsPas encore d'évaluation
- Seismic Migration: Imaging of Acoustic Energy by Wave Field Extrapolation..: Imaging of Acoustic Energy by Wave Field ExtrapolationD'EverandSeismic Migration: Imaging of Acoustic Energy by Wave Field Extrapolation..: Imaging of Acoustic Energy by Wave Field ExtrapolationPas encore d'évaluation
- CGGV 0000008653Document13 pagesCGGV 0000008653himanshugstPas encore d'évaluation
- Anisotropy Estimation For PSDMDocument4 pagesAnisotropy Estimation For PSDMhimanshugstPas encore d'évaluation
- Anisotropic PSDM in PracticeDocument3 pagesAnisotropic PSDM in PracticehimanshugstPas encore d'évaluation
- 10 Seismic StratigraphyDocument48 pages10 Seismic Stratigraphyzemabder100% (2)
- Ocean Bottom SeismicDocument28 pagesOcean Bottom SeismichimanshugstPas encore d'évaluation
- Aspheric Lenses - Optometry TodayDocument4 pagesAspheric Lenses - Optometry TodaySourav KarmakarPas encore d'évaluation
- Ae4440z Fz1aDocument2 pagesAe4440z Fz1aMageon7Pas encore d'évaluation
- Caribbean Examinations Council: CXC SyllabusDocument2 pagesCaribbean Examinations Council: CXC SyllabusRedso LallPas encore d'évaluation
- Triaxial Compression Test On Cohesive Soil: Lab Report NoDocument6 pagesTriaxial Compression Test On Cohesive Soil: Lab Report NoYousif MawloodPas encore d'évaluation
- The Energy Equation: Control Volume With No Mass TransferDocument39 pagesThe Energy Equation: Control Volume With No Mass TransferBurak EzelPas encore d'évaluation
- Introduction To Robotics and Computer VisionDocument2 pagesIntroduction To Robotics and Computer Visionbereketab mulugetaPas encore d'évaluation
- MCV4U - Unit 3 - Version ADocument60 pagesMCV4U - Unit 3 - Version AhayatPas encore d'évaluation
- Assignment 4 - A22Document4 pagesAssignment 4 - A22viky kavaPas encore d'évaluation
- Skyrealms DemoDocument16 pagesSkyrealms DemoAlexGamer12100100% (1)
- 1978 A-Level Pure Mathematics Paper I: B Ab B A ADocument7 pages1978 A-Level Pure Mathematics Paper I: B Ab B A AChong Ka LeePas encore d'évaluation
- Gemini VII 2390 Operator Manual V3.03Document426 pagesGemini VII 2390 Operator Manual V3.03PablosPas encore d'évaluation
- List of Geology: Sr. Code Isbn Author Title FC FC Price Year SubjectDocument3 pagesList of Geology: Sr. Code Isbn Author Title FC FC Price Year SubjectwajeehPas encore d'évaluation
- Mixed Methods and Processes in Applied Linguistics ResearchDocument343 pagesMixed Methods and Processes in Applied Linguistics ResearchSCARLET PAULETTE ABARCA GARZONPas encore d'évaluation
- Logic and Critical Thinking ModuleDocument227 pagesLogic and Critical Thinking Moduleabrsh100% (1)
- Beijing Institute of Technology FacultyDocument2 pagesBeijing Institute of Technology FacultyFootball ManiaPas encore d'évaluation
- Solved Example On MasonryDocument53 pagesSolved Example On MasonrysanketPas encore d'évaluation
- Sine Regression: 5 QuestionsDocument3 pagesSine Regression: 5 QuestionsSolomon ReynoldsPas encore d'évaluation
- (копия)Document2 pages(копия)DaLLaSPas encore d'évaluation
- Design and Control of Condensate-Throttling ReboilersDocument12 pagesDesign and Control of Condensate-Throttling ReboilersForcus onPas encore d'évaluation
- Balason Land RequirementsDocument2 pagesBalason Land Requirementsnira365Pas encore d'évaluation
- 1 Soil MechanicsDocument113 pages1 Soil MechanicsAysheshim BahruPas encore d'évaluation
- Absolute Value Equations #1 PDFDocument4 pagesAbsolute Value Equations #1 PDFyinminPas encore d'évaluation
- 91 Senate Approved Courses Scheme & Syllabus For B.E. Mechanical Engg. (2016)Document2 pages91 Senate Approved Courses Scheme & Syllabus For B.E. Mechanical Engg. (2016)VINAYAK SHARMAPas encore d'évaluation
- Basic Aerodynamics BasicsDocument86 pagesBasic Aerodynamics BasicsElvis ParvoiPas encore d'évaluation
- Mini-Test: Chapter 4 Student's Name:: A: B: C: D: FDocument2 pagesMini-Test: Chapter 4 Student's Name:: A: B: C: D: FThành ChiếnPas encore d'évaluation
- Cambridge International AS and A Level Physics (9702) : Practical Booklet 4Document10 pagesCambridge International AS and A Level Physics (9702) : Practical Booklet 4Abdul Ahad SajjadPas encore d'évaluation
- Rigidity ModulusDocument9 pagesRigidity ModulusKim ShakePas encore d'évaluation
- Simplifying Trigonometric Expressions: I. ObjectivesDocument14 pagesSimplifying Trigonometric Expressions: I. ObjectivesNery GranadaPas encore d'évaluation
- Hydrostatic ThrustDocument9 pagesHydrostatic ThrustAngelica Gicom100% (1)
- CSEC Physics June 1999 P1Document10 pagesCSEC Physics June 1999 P1Laimen ReveskiPas encore d'évaluation