Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- HP LaserJet 5P - 6P Service Manual (Proper)Document116 pagesHP LaserJet 5P - 6P Service Manual (Proper)maroudasp100% (1)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- UNIC Brochure English PDFDocument40 pagesUNIC Brochure English PDFOvirelance -Marius PascariuPas encore d'évaluation
- Bearden On Maxwell's EquationsDocument10 pagesBearden On Maxwell's Equationspaulsub63Pas encore d'évaluation
- Vodafone Bid HBS Case - ExhibitsDocument13 pagesVodafone Bid HBS Case - ExhibitsNaman PorwalPas encore d'évaluation
- Huawei Site Design GuidelineDocument7 pagesHuawei Site Design GuidelineHeru BudiantoPas encore d'évaluation
- SOP's For All Digital Marketing ActivitesDocument3 pagesSOP's For All Digital Marketing ActivitesSavijeet Singh50% (2)
- 5-Unsymmetrical Fault AnalysisDocument5 pages5-Unsymmetrical Fault Analysisvirenpandya0% (1)
- Linearized Pipe Ow To Reynolds NumberDocument22 pagesLinearized Pipe Ow To Reynolds NumberAlim SheikhPas encore d'évaluation
- Near Real-Time Road Centerline ExtractionDocument6 pagesNear Real-Time Road Centerline ExtractionAlim SheikhPas encore d'évaluation
- Learning To Detect Roads in High-Resolution Aerial ImagesDocument14 pagesLearning To Detect Roads in High-Resolution Aerial ImagesAlim SheikhPas encore d'évaluation
- Guide70 PDFDocument11 pagesGuide70 PDFAlim SheikhPas encore d'évaluation
- An Improved Hybrid Model For Molecular Image de No I SingDocument7 pagesAn Improved Hybrid Model For Molecular Image de No I SingAlim SheikhPas encore d'évaluation
- 2004 Dec 1405-1416 PDFDocument12 pages2004 Dec 1405-1416 PDFAlim SheikhPas encore d'évaluation
- American Psychological Association (APA) Documentation M PDFDocument7 pagesAmerican Psychological Association (APA) Documentation M PDFGene Shav FalconerPas encore d'évaluation
- Non Lin Filt Neuro Morph NetworksDocument31 pagesNon Lin Filt Neuro Morph NetworksAlim SheikhPas encore d'évaluation
- Chapter 9Document8 pagesChapter 9Hữu Vấn HoàngPas encore d'évaluation
- A General Weighted Median Filter Structure Admitting Negative WeightsDocument11 pagesA General Weighted Median Filter Structure Admitting Negative WeightsAlim SheikhPas encore d'évaluation
- Thesis MCJ FrankenDocument209 pagesThesis MCJ FrankenAlim SheikhPas encore d'évaluation
- A Custom FPGA Processor For Physical Model Ordinary Differential Equation SolvingDocument4 pagesA Custom FPGA Processor For Physical Model Ordinary Differential Equation SolvingAlim SheikhPas encore d'évaluation
- LMS Algorithm for Adaptive FilteringDocument10 pagesLMS Algorithm for Adaptive FilteringkadourzianiPas encore d'évaluation
- PRL YangDocument13 pagesPRL YangAlim SheikhPas encore d'évaluation
- DSP Lab Introduction to MatlabDocument10 pagesDSP Lab Introduction to MatlabAlim SheikhPas encore d'évaluation
- V/F Converter Ics Handle Frequency-To-Voltage Needs: The Art of CompromiseDocument8 pagesV/F Converter Ics Handle Frequency-To-Voltage Needs: The Art of CompromiseAlim SheikhPas encore d'évaluation
- FPGA Based Acceleration For Image Processing ApplicationsDocument17 pagesFPGA Based Acceleration For Image Processing ApplicationsAlim SheikhPas encore d'évaluation
- 06.20240 QZhangDocument156 pages06.20240 QZhangAlim SheikhPas encore d'évaluation
- Artificial Intelligence.a New SynthesisDocument514 pagesArtificial Intelligence.a New SynthesisTrong Hai DuongPas encore d'évaluation
- AWavelet-Based Framework For Face RecognitionDocument7 pagesAWavelet-Based Framework For Face RecognitionRaveendra MoodithayaPas encore d'évaluation
- Pin Diagram of 8086 HandoutsDocument6 pagesPin Diagram of 8086 HandoutsSakthidasan SankaranPas encore d'évaluation
- A Limiting Rule For The Variability of Coding Sequences Length in Microbial GenomesDocument5 pagesA Limiting Rule For The Variability of Coding Sequences Length in Microbial GenomesAlim SheikhPas encore d'évaluation
- 2 (Molecular Diffusion in Gases)Document66 pages2 (Molecular Diffusion in Gases)Nasir ShamsPas encore d'évaluation
- Ae53 Ac53 At53Document4 pagesAe53 Ac53 At53M Taher BamyaniPas encore d'évaluation
- 555 Timer 40khz IRDocument2 pages555 Timer 40khz IRapi-3712130Pas encore d'évaluation
- Midterm Exam Shuffled BasisDocument5 pagesMidterm Exam Shuffled BasisJohnPas encore d'évaluation
- SUDOKU DocumentDocument37 pagesSUDOKU DocumentAmbika Sharma33% (3)
- 93C66 Microwire EepromDocument13 pages93C66 Microwire EepromadrianramonPas encore d'évaluation
- Free Electron TheoryDocument4 pagesFree Electron TheoryARGHYADEEP NAGPas encore d'évaluation
- S7 314 IFM: Hardware and InstallationDocument87 pagesS7 314 IFM: Hardware and InstallationNitko NetkoPas encore d'évaluation
- ZF AVS Automatic Gearbox Manual PDFDocument67 pagesZF AVS Automatic Gearbox Manual PDFDardan HusiPas encore d'évaluation
- Physics Investigatory Project Class 12 CbseDocument20 pagesPhysics Investigatory Project Class 12 Cbsesyed50% (6)
- L6565 DatasheetDocument17 pagesL6565 DatasheetJose BenavidesPas encore d'évaluation
- Unitplan2 Chi-SquareDocument11 pagesUnitplan2 Chi-Squareapi-285549920Pas encore d'évaluation
- Shop Exercise 5Document16 pagesShop Exercise 5Athena GrotesquePas encore d'évaluation
- Retaining Wall ReporterDocument18 pagesRetaining Wall ReporterJoefel BessatPas encore d'évaluation
- VDVDVXVCFDBCVCDocument390 pagesVDVDVXVCFDBCVCHafiz Rahmat UllahPas encore d'évaluation
- Engineering Chemistry Lab Osmania UniversityDocument83 pagesEngineering Chemistry Lab Osmania UniversityMujtaba khanPas encore d'évaluation
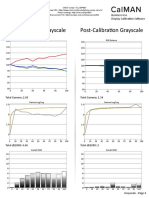
- TCL 55P607 CNET Review Calibration ResultsDocument3 pagesTCL 55P607 CNET Review Calibration ResultsDavid KatzmaierPas encore d'évaluation
- Deformation of Ceramics and PolymersDocument41 pagesDeformation of Ceramics and PolymersJane Erestain BuenaobraPas encore d'évaluation
- Manual ApolloDocument263 pagesManual ApolloJose Luis CristanchoPas encore d'évaluation
- Install and Configure Computer SystemsDocument18 pagesInstall and Configure Computer SystemsAlbino LarozaPas encore d'évaluation
- 20-SDMS-02 Overhead Line Accessories PDFDocument102 pages20-SDMS-02 Overhead Line Accessories PDFMehdi SalahPas encore d'évaluation
- Refining of MaterialsDocument38 pagesRefining of MaterialsJAWAD AHMAD BURTPas encore d'évaluation
- Solutions: Rise Desnita, M.Si., AptDocument41 pagesSolutions: Rise Desnita, M.Si., Aptdeput_rprPas encore d'évaluation