Vous aimerez peut-être aussi
- Fundamentals and Applications of Bionic Drilling FluidsD'EverandFundamentals and Applications of Bionic Drilling FluidsPas encore d'évaluation
- Measurement While Drilling: Signal Analysis, Optimization and DesignD'EverandMeasurement While Drilling: Signal Analysis, Optimization and DesignPas encore d'évaluation
- Drillpipe Buckling in Inclined HolesDocument5 pagesDrillpipe Buckling in Inclined Holeslulalala8888100% (3)
- Spe 196232 MSDocument18 pagesSpe 196232 MShijoetigrePas encore d'évaluation
- Drill String Design Group 3Document15 pagesDrill String Design Group 3Anusha AnuPas encore d'évaluation
- Optimization of Drilling Parameters With The Performance of Multilobe Positive Displacement Motor (PDM)Document8 pagesOptimization of Drilling Parameters With The Performance of Multilobe Positive Displacement Motor (PDM)drilling moneytree100% (1)
- New Criteria For Gravel and Screen Selection For Sand Control PDFDocument14 pagesNew Criteria For Gravel and Screen Selection For Sand Control PDFCharles DesmazuresPas encore d'évaluation
- Drilling Bits SPE Series-ADIDocument62 pagesDrilling Bits SPE Series-ADIAlfredo TintayaPas encore d'évaluation
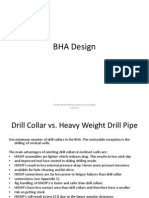
- BHA Design: ©2011 Best-Drilling-Practices - Tk. All Rights ReservedDocument8 pagesBHA Design: ©2011 Best-Drilling-Practices - Tk. All Rights ReservedRMolina65Pas encore d'évaluation
- NZS 2403-2015 - v1-3Document118 pagesNZS 2403-2015 - v1-3Brian ChristiantoroPas encore d'évaluation
- Helical Buckling of Coiled Tubing in Directional Oil Wellbores 2009Document1 pageHelical Buckling of Coiled Tubing in Directional Oil Wellbores 2009SIMULIACorpPas encore d'évaluation
- Nation 16 3 Hour On: Pet-A, Oil Gas Well Drillin Ompletion For 016Document7 pagesNation 16 3 Hour On: Pet-A, Oil Gas Well Drillin Ompletion For 016سالم العيساويPas encore d'évaluation
- Buckling Analysis in Deviated Wells A Practical MethodDocument10 pagesBuckling Analysis in Deviated Wells A Practical Methodsabilco13Pas encore d'évaluation
- Gas Cut MudDocument53 pagesGas Cut Mudabnou_223943920Pas encore d'évaluation
- API Non Upset EndDocument1 pageAPI Non Upset EndChoerunnisa Firli FitriahPas encore d'évaluation
- Dynamic Model For Stiff String Torque and DragDocument16 pagesDynamic Model For Stiff String Torque and DragMOHAMED ALi IBRAHIM HASSANPas encore d'évaluation
- Otc15233overcoming Deep and Ultra Deepwater Drilling Challenges PDFDocument12 pagesOtc15233overcoming Deep and Ultra Deepwater Drilling Challenges PDFmoshito2012Pas encore d'évaluation
- Hole CleaningDocument8 pagesHole Cleaninganon_850924421Pas encore d'évaluation
- API-55-165 Use of Stabilizers in Controlling Hole DeviationDocument18 pagesAPI-55-165 Use of Stabilizers in Controlling Hole Deviationdrilling moneytreePas encore d'évaluation
- Designing Well Paths To Reduce Drag and TorqueDocument7 pagesDesigning Well Paths To Reduce Drag and Torquedrilling moneytreePas encore d'évaluation
- The Most Important Is To Visually Inspect Drilling Line All TimeDocument6 pagesThe Most Important Is To Visually Inspect Drilling Line All TimeabeymechPas encore d'évaluation
- Torque and Drag Calculations in Three-Dimensional PDFDocument167 pagesTorque and Drag Calculations in Three-Dimensional PDFOsvaldo Pi S. NdongaPas encore d'évaluation
- Drill Pipe ChartsDocument11 pagesDrill Pipe ChartsSean PorterPas encore d'évaluation
- Modeling Casing Running in High Angle WellsDocument11 pagesModeling Casing Running in High Angle WellskameliooPas encore d'évaluation
- Master of Petroleum Engineering Drilling Bit SelectionDocument10 pagesMaster of Petroleum Engineering Drilling Bit SelectionKaveh Bahiraee100% (1)
- Kick Tolerance Calculations For Well Design and Drilling OperationsDocument2 pagesKick Tolerance Calculations For Well Design and Drilling Operationsi oPas encore d'évaluation
- Driller's Depth ErrorsDocument2 pagesDriller's Depth Errorsnyanya2007Pas encore d'évaluation
- Diametros de Pozo y Trepanos Perf IIDocument1 pageDiametros de Pozo y Trepanos Perf IImiguelPas encore d'évaluation
- Drilling Optimization PDFDocument22 pagesDrilling Optimization PDFRoyPas encore d'évaluation
- Uttaranchal Uni Annular Pressure ReportDocument26 pagesUttaranchal Uni Annular Pressure ReportDhruv DasPas encore d'évaluation
- 3 KickDocument63 pages3 KickAmirah Razali100% (2)
- Directional Drilling CalcuationsDocument43 pagesDirectional Drilling CalcuationsNourden Al100% (1)
- Mud Design by Using KCL Polymer To Reduce Swelling Shale Control 2015 h2Document5 pagesMud Design by Using KCL Polymer To Reduce Swelling Shale Control 2015 h2Andi SusetioPas encore d'évaluation
- Banda East Well Montage 28sept08 A4 SizeDocument1 pageBanda East Well Montage 28sept08 A4 SizeSyed IrtazaPas encore d'évaluation
- Acoustic Well StimulationDocument2 pagesAcoustic Well StimulationCristian BarbuceanuPas encore d'évaluation
- SPE-15467 Basic Concepts in Static BHA Analysis For Directional DrillingDocument12 pagesSPE-15467 Basic Concepts in Static BHA Analysis For Directional Drillingdrilling moneytreePas encore d'évaluation
- KNTrang Nam Drilling Program PDFDocument67 pagesKNTrang Nam Drilling Program PDFVõ Văn VũPas encore d'évaluation
- Spe 36761 MSDocument13 pagesSpe 36761 MSKarla CotesPas encore d'évaluation
- SPE 88446 Making Steerable Bits: Separating Side-Force From Side-CuttingDocument7 pagesSPE 88446 Making Steerable Bits: Separating Side-Force From Side-CuttingmsmsoftPas encore d'évaluation
- 04 Circulating Well Control Methods - 1Document10 pages04 Circulating Well Control Methods - 1sitemaster60Pas encore d'évaluation
- Well CompletionDocument82 pagesWell CompletionFlorian Ananias ByarugabaPas encore d'évaluation
- Mud Gas Separator Poor Boy DegasserDocument3 pagesMud Gas Separator Poor Boy DegasserZain Ul AbdeenPas encore d'évaluation
- Determine Hole Cleaning Requirement in Deviated WellsDocument22 pagesDetermine Hole Cleaning Requirement in Deviated WellsCut Fanni Ayutaya100% (1)
- IADC/SPE 72290 Drilling Fluids Design and Management For Extended Reach DrillingDocument7 pagesIADC/SPE 72290 Drilling Fluids Design and Management For Extended Reach Drillinggplese0Pas encore d'évaluation
- Lubinski - Helical Buckling of Tubing Sealed in PackersDocument16 pagesLubinski - Helical Buckling of Tubing Sealed in PackersArjun JanamattiPas encore d'évaluation
- 03 Shut-In ProcedureDocument15 pages03 Shut-In Proceduresitemaster60Pas encore d'évaluation
- Section 08 - Tripping & Backreaming PracticesDocument70 pagesSection 08 - Tripping & Backreaming PracticesMohamed Ahmed AlyPas encore d'évaluation
- 1.8 Casing Design1.9 Collapse, TensionDocument19 pages1.8 Casing Design1.9 Collapse, TensionRit Bangkruai100% (1)
- Eliminate Borehole Misbehaviors with Optimal Drilling PracticesDocument19 pagesEliminate Borehole Misbehaviors with Optimal Drilling PracticesJorgito AriasPas encore d'évaluation
- SAOGE 2008 - Paper - Full Scale Verification of The Reelwell Drilling MethodDocument10 pagesSAOGE 2008 - Paper - Full Scale Verification of The Reelwell Drilling MethodBep De JongPas encore d'évaluation
- 3 - Tubing CalculationsDocument6 pages3 - Tubing Calculationsباسم باسمPas encore d'évaluation
- Glossary of Drilling Report AbbreviationsDocument4 pagesGlossary of Drilling Report AbbreviationsFatima Al-nPas encore d'évaluation
- TUTORIAL 1 Drilling EngineerDocument4 pagesTUTORIAL 1 Drilling EngineerAnonymous AkV8maWxGNPas encore d'évaluation
- Application of Minimum Curvature MethodDocument118 pagesApplication of Minimum Curvature Methoderwan100% (1)
- Red BookDocument429 pagesRed BookAmirah Razali100% (1)
- Maximum Overpull Worksheet: Well:Grenadier EDC - 90Document1 pageMaximum Overpull Worksheet: Well:Grenadier EDC - 90islam atifPas encore d'évaluation
- Bit HydraulicsDocument11 pagesBit HydraulicstibismtxPas encore d'évaluation
- Fundamentals of Drilling Engineering: MCQs and Workout Examples for Beginners and EngineersD'EverandFundamentals of Drilling Engineering: MCQs and Workout Examples for Beginners and EngineersPas encore d'évaluation
- Formation Testing: Supercharge, Pressure Testing, and Contamination ModelsD'EverandFormation Testing: Supercharge, Pressure Testing, and Contamination ModelsPas encore d'évaluation
- Selective Extraction of Neutral Nitrogen Compounds Found in Diesel Feed byDocument8 pagesSelective Extraction of Neutral Nitrogen Compounds Found in Diesel Feed byJohnSmithPas encore d'évaluation
- Zn-Containing Ionic Liquids For The Extractive Denitrogenation of A Model Oil - A Mechanistic ConsiderationDocument7 pagesZn-Containing Ionic Liquids For The Extractive Denitrogenation of A Model Oil - A Mechanistic ConsiderationJohnSmithPas encore d'évaluation
- Science:, 792 (2003) Robin D. Rogers and Kenneth R. SeddonDocument3 pagesScience:, 792 (2003) Robin D. Rogers and Kenneth R. SeddonJohnSmithPas encore d'évaluation
- Deep Eutectic Solvent Concentration in The Room Temperature Ionic Conductivity and Thermal Behavior of Corn Starch Based Polymer ElectrolytesDocument4 pagesDeep Eutectic Solvent Concentration in The Room Temperature Ionic Conductivity and Thermal Behavior of Corn Starch Based Polymer ElectrolytesJohnSmithPas encore d'évaluation
- Properties and Phase Equilibria of Fluid Mixtures As The Basis For Developing Green Chemical ProcessesDocument9 pagesProperties and Phase Equilibria of Fluid Mixtures As The Basis For Developing Green Chemical ProcessesJohnSmithPas encore d'évaluation
- Are Deep EutecticDocument3 pagesAre Deep EutecticJohnSmithPas encore d'évaluation
- Selective Adsorption For Removal of Nitrogen Compounds From Liquid HC Streams Over Carbon - and Alumina - Based AdsorbentsDocument10 pagesSelective Adsorption For Removal of Nitrogen Compounds From Liquid HC Streams Over Carbon - and Alumina - Based AdsorbentsJohnSmithPas encore d'évaluation
- Inhibition Effects of Nitrogen Compounds On The HDS of Dibenzothiophene Part 2aDocument8 pagesInhibition Effects of Nitrogen Compounds On The HDS of Dibenzothiophene Part 2aJohnSmithPas encore d'évaluation
- Chemical Reviews Volume 99 Issue 8 1999 (Doi 10.1021/cr980032t) Welton, Thomas - Room-Temperature Ionic Liquids. Solvents For Synthesis and CatalysisDocument14 pagesChemical Reviews Volume 99 Issue 8 1999 (Doi 10.1021/cr980032t) Welton, Thomas - Room-Temperature Ionic Liquids. Solvents For Synthesis and Catalysissushantkadam75Pas encore d'évaluation
- Based Upon Multivalent Metal IonsDocument29 pagesBased Upon Multivalent Metal IonsJohnSmithPas encore d'évaluation
- Use of Ab AlgorithmicDocument12 pagesUse of Ab AlgorithmicJohnSmithPas encore d'évaluation
- Electrodeposition of Co, SM and SmCo From A Deep Eutectic SolventDocument7 pagesElectrodeposition of Co, SM and SmCo From A Deep Eutectic SolventJohnSmithPas encore d'évaluation
- Ionic Liquid Analogues Formed From Hydrated Metal SaltsDocument6 pagesIonic Liquid Analogues Formed From Hydrated Metal SaltsJohnSmithPas encore d'évaluation
- Bacteria Incorporation in Deep-Eutectic Solvents Through FreezeDocument5 pagesBacteria Incorporation in Deep-Eutectic Solvents Through FreezeJohnSmithPas encore d'évaluation
- Post-Etch Residue Removal Using Choline Chloride-Malonic Acid Deep Eutectic Solvent (DES)Document6 pagesPost-Etch Residue Removal Using Choline Chloride-Malonic Acid Deep Eutectic Solvent (DES)JohnSmithPas encore d'évaluation
- Electrodeposition of Zinc-Tin Alloys From Deep Eutectic Solvents Based On Choline ChlorideDocument7 pagesElectrodeposition of Zinc-Tin Alloys From Deep Eutectic Solvents Based On Choline ChlorideJohnSmithPas encore d'évaluation
- Synthesis of Monoclinic Structured BiVO4 Spindly Microtubes in Deep Eutectic Solvent and Their Application For Dye DegradationDocument7 pagesSynthesis of Monoclinic Structured BiVO4 Spindly Microtubes in Deep Eutectic Solvent and Their Application For Dye DegradationJohnSmithPas encore d'évaluation
- Electrodeposition of Co, SM and SmCo From A Deep Eutectic SolventDocument7 pagesElectrodeposition of Co, SM and SmCo From A Deep Eutectic SolventJohnSmithPas encore d'évaluation
- Deep Eutectic Solvent Concentration in The Room Temperature Ionic Conductivity and Thermal Behavior of Corn Starch Based Polymer ElectrolytesDocument4 pagesDeep Eutectic Solvent Concentration in The Room Temperature Ionic Conductivity and Thermal Behavior of Corn Starch Based Polymer ElectrolytesJohnSmithPas encore d'évaluation
- New Synthetic Route of Polyoxometalate-Based Hybrids in Choline Chloride - Urea Eutectic Media PDFDocument5 pagesNew Synthetic Route of Polyoxometalate-Based Hybrids in Choline Chloride - Urea Eutectic Media PDFJohnSmithPas encore d'évaluation
- Methods For Stabilizing and Activating EnzymesDocument17 pagesMethods For Stabilizing and Activating EnzymesJohnSmithPas encore d'évaluation
- Ionothermal Materials Synthesis Using UnstableDocument5 pagesIonothermal Materials Synthesis Using UnstableJohnSmithPas encore d'évaluation
- Ionic Liquid Analogues Formed From Hydrated Metal SaltsDocument6 pagesIonic Liquid Analogues Formed From Hydrated Metal SaltsJohnSmithPas encore d'évaluation
- Deep Eutectic Solvent Concentration in The Room Temperature Ionic Conductivity and Thermal Behavior of Corn Starch Based Polymer ElectrolytesDocument4 pagesDeep Eutectic Solvent Concentration in The Room Temperature Ionic Conductivity and Thermal Behavior of Corn Starch Based Polymer ElectrolytesJohnSmithPas encore d'évaluation
- Properties and Phase Equilibria of Fluid Mixtures As The Basis For Developing Green Chemical ProcessesDocument9 pagesProperties and Phase Equilibria of Fluid Mixtures As The Basis For Developing Green Chemical ProcessesJohnSmithPas encore d'évaluation
- Direct Conversion of Inulin To 5-Hydroxymethylfurfural in BiorenewableDocument5 pagesDirect Conversion of Inulin To 5-Hydroxymethylfurfural in BiorenewableJohnSmithPas encore d'évaluation
- Molar Heat Capacities of Choline Chloride-Based Deep Eutectic Solvents and Their Binary Mixtures With WaterDocument25 pagesMolar Heat Capacities of Choline Chloride-Based Deep Eutectic Solvents and Their Binary Mixtures With WaterJohnSmithPas encore d'évaluation
- Based Upon Multivalent Metal IonsDocument29 pagesBased Upon Multivalent Metal IonsJohnSmithPas encore d'évaluation
- Ionothermal Materials Synthesis Using UnstableDocument5 pagesIonothermal Materials Synthesis Using UnstableJohnSmithPas encore d'évaluation
- Ulrich 1984Document12 pagesUlrich 1984Revah IbrahimPas encore d'évaluation
- Screenplay TipsDocument32 pagesScreenplay TipsRaja Kumar100% (1)
- Agency Theory and Executive Pay The Remuneration Committees Dilemma (Alexander Pepper, Palgrave 2019)Document140 pagesAgency Theory and Executive Pay The Remuneration Committees Dilemma (Alexander Pepper, Palgrave 2019)Hồ Ngọc Yến MinhPas encore d'évaluation
- Chapter 3 The Filipino WayDocument12 pagesChapter 3 The Filipino WayJoy Estela MangayaPas encore d'évaluation
- ManagementDocument16 pagesManagementSahar Al-JoburyPas encore d'évaluation
- 3rd Grade Lesson PlansDocument5 pages3rd Grade Lesson Plansapi-3559611970% (1)
- Creativity PresentationDocument26 pagesCreativity PresentationDivyansh TomarPas encore d'évaluation
- Animal Communication 5 Secrets To Mastery MKDocument71 pagesAnimal Communication 5 Secrets To Mastery MKAirrrin100% (1)
- English DraftDocument5 pagesEnglish Draftapi-452150993Pas encore d'évaluation
- Logical FallaciesDocument3 pagesLogical FallaciesElias TekPas encore d'évaluation
- Explore India's Rich Literary HeritageDocument16 pagesExplore India's Rich Literary HeritageVipin MohanPas encore d'évaluation
- Local Government in GhanaDocument10 pagesLocal Government in Ghanaelliot_sarpong6483Pas encore d'évaluation
- OB Chapter 3 Perception Review QuizDocument2 pagesOB Chapter 3 Perception Review QuizAsma KPas encore d'évaluation
- Conversion Between Displacement, Velocity and Acceleration - CBMAppsDocument3 pagesConversion Between Displacement, Velocity and Acceleration - CBMAppsniraj_hwbPas encore d'évaluation
- Introduction To The Philosophy of The Human Person: Prudence and Frugality Towards The EnvironmentDocument14 pagesIntroduction To The Philosophy of The Human Person: Prudence and Frugality Towards The EnvironmentPril Gueta100% (1)
- Post Subcultural TheoryDocument6 pagesPost Subcultural TheoryAkhmad Alfan RahadiPas encore d'évaluation
- Taghoot ExplainedDocument10 pagesTaghoot ExplainedTafsir Ibn KathirPas encore d'évaluation
- Ziad BaroudiDocument12 pagesZiad BaroudiusamaknightPas encore d'évaluation
- Water Jet Procedd PDFDocument788 pagesWater Jet Procedd PDFVijendraAgar100% (1)
- Richard Brodie - Virus of The MindDocument8 pagesRichard Brodie - Virus of The MindtempullybonePas encore d'évaluation
- BJ HabibieDocument4 pagesBJ HabibieDea Salsabila siregarPas encore d'évaluation
- Hansel and Gretel Lit CritDocument11 pagesHansel and Gretel Lit Critdanica gracePas encore d'évaluation
- A Study of Beggars Characteristics and Attitude of People Towards TheDocument14 pagesA Study of Beggars Characteristics and Attitude of People Towards TheLaiKamChongPas encore d'évaluation
- Trigonometry FunctionsDocument14 pagesTrigonometry FunctionsKeri-ann Millar50% (2)
- PhilosophyDocument15 pagesPhilosophyArnab Kumar MukhopadhyayPas encore d'évaluation
- Naturalism in Education Philosophy SummaryDocument20 pagesNaturalism in Education Philosophy SummaryAya IbanezPas encore d'évaluation
- Safety Induction Post Test Answer Sheet: Name: Nexus: Score: Instructor: DateDocument1 pageSafety Induction Post Test Answer Sheet: Name: Nexus: Score: Instructor: DateJunard Lu HapPas encore d'évaluation
- 12: Consumer BehaviourDocument43 pages12: Consumer Behaviournageswara_mutyalaPas encore d'évaluation
- Crash Film AnalysisDocument4 pagesCrash Film AnalysisstPas encore d'évaluation
- Assmann, The Ancient Egyptian Myth of The Journey of The SunDocument14 pagesAssmann, The Ancient Egyptian Myth of The Journey of The Sunousermontou-1Pas encore d'évaluation