Vous aimerez peut-être aussi
- Automatic Brake Failure Indicator and Over Heating AlarmDocument11 pagesAutomatic Brake Failure Indicator and Over Heating AlarmAakash SheelvantPas encore d'évaluation
- Autonomous Cleaning RobotDocument4 pagesAutonomous Cleaning RobotAakash SheelvantPas encore d'évaluation
- Automated Rope Climbing RobotDocument10 pagesAutomated Rope Climbing RobotAakash SheelvantPas encore d'évaluation
- S124-Solar Based Mobile Charger For Rural AreasDocument4 pagesS124-Solar Based Mobile Charger For Rural AreasYellaturi Siva Kishore ReddyPas encore d'évaluation
- Design and Development of "Suraksha"-A Women SafetyDocument9 pagesDesign and Development of "Suraksha"-A Women SafetyAakash SheelvantPas encore d'évaluation
- Multiuser Short Message Service Based Wireless Electronic Notice BoardDocument7 pagesMultiuser Short Message Service Based Wireless Electronic Notice BoardPavanJangidPas encore d'évaluation
- ATM Security Using Fingerprint RecognitionDocument6 pagesATM Security Using Fingerprint RecognitionAakash SheelvantPas encore d'évaluation
- Autonomous Indoor Helicopter Flight Using A Single Onboard CameraDocument8 pagesAutonomous Indoor Helicopter Flight Using A Single Onboard CameraAakash SheelvantPas encore d'évaluation
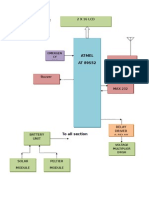
- Safety Block DiagramDocument1 pageSafety Block DiagramAakash SheelvantPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- CP13 1999Document55 pagesCP13 1999Nyan Myint TunPas encore d'évaluation
- ASME B31.4 - 2006 (Excerpt - Pgs. 39, 40 & 41)Document3 pagesASME B31.4 - 2006 (Excerpt - Pgs. 39, 40 & 41)Paul CassellsPas encore d'évaluation
- DIN EN 1563 (2012.03) en ST - NDocument1 pageDIN EN 1563 (2012.03) en ST - NNayana NaikPas encore d'évaluation
- C2 Quantitative Chemistry HigherDocument12 pagesC2 Quantitative Chemistry HigherdownendsciencePas encore d'évaluation
- Hojas de Sierra Wood-Mizer.Document8 pagesHojas de Sierra Wood-Mizer.Enrique HernandezPas encore d'évaluation
- Astm D7522M-21Document6 pagesAstm D7522M-21Edgar Joel Perez CarvajalPas encore d'évaluation
- Structural Steel Design BowlesDocument276 pagesStructural Steel Design BowlesIonut Narcis Iuga88% (8)
- JK CatalogueDocument12 pagesJK CataloguePraveen BoshettiPas encore d'évaluation
- Azkoyen Palma M Tech ManualDocument42 pagesAzkoyen Palma M Tech ManualrxPas encore d'évaluation
- DEAERATORDocument26 pagesDEAERATORSai Swaroop100% (2)
- Mass Balance CalculationsDocument3 pagesMass Balance CalculationsSiphoPas encore d'évaluation
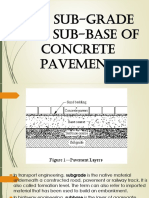
- The Sub-Grade and Sub-Base of Concrete PavementDocument16 pagesThe Sub-Grade and Sub-Base of Concrete PavementPatrick TaylorPas encore d'évaluation
- Air CompressorDocument48 pagesAir CompressorMarius Condurache0% (1)
- 3Document24 pages3Dennis AleaPas encore d'évaluation
- GH 961Document1 pageGH 961ÄhmêdÄBdulhåqPas encore d'évaluation
- Product Bulletin Fisher Large Ed Ewd Et Ewt Valves Nps 12 Through 30 en 122576Document20 pagesProduct Bulletin Fisher Large Ed Ewd Et Ewt Valves Nps 12 Through 30 en 122576franciscocruz29Pas encore d'évaluation
- ROLLING MILL REPORT RevampDocument31 pagesROLLING MILL REPORT RevamprohitPas encore d'évaluation
- Intro To Gears & Gear TrainsDocument20 pagesIntro To Gears & Gear TrainsBrettPas encore d'évaluation
- 21 49 PlansDocument7 pages21 49 PlansShehab Abu AhmadPas encore d'évaluation
- Craftsman Tractor ManualDocument72 pagesCraftsman Tractor Manualbjhoxie106Pas encore d'évaluation
- Types of WireDocument2 pagesTypes of WireMICHAELPas encore d'évaluation
- Kandhal - Recommended-Revisions-to-MORTH-Specifications-Section-500 PDFDocument44 pagesKandhal - Recommended-Revisions-to-MORTH-Specifications-Section-500 PDFJimmy ThomasPas encore d'évaluation
- PET Plastic RecyclingDocument42 pagesPET Plastic RecyclingDavid MunenePas encore d'évaluation
- 39S 4PD PDFDocument52 pages39S 4PD PDFANDRES MALDONADOPas encore d'évaluation
- Sil 26-0233eDocument13 pagesSil 26-0233eKhaled ElmabroukPas encore d'évaluation
- AASHTO T121 Testing FormDocument4 pagesAASHTO T121 Testing Formdep_vinPas encore d'évaluation
- Manual Rodillo Compactador Series Ca250 Dynapac PDFDocument70 pagesManual Rodillo Compactador Series Ca250 Dynapac PDFMarcel Foshino Osorio Perez100% (1)
- Is 7001 1989Document14 pagesIs 7001 1989Kevin100% (1)
- Welding Procedure Specification NO. 8-32-1: National Certified Pipe Welding BureauDocument7 pagesWelding Procedure Specification NO. 8-32-1: National Certified Pipe Welding BureauDanem HalasPas encore d'évaluation
- Table UCS-56-2 Postweld Heat Treatment Requirements For Carbon and Low Alloy Steels - P-No. 3Document7 pagesTable UCS-56-2 Postweld Heat Treatment Requirements For Carbon and Low Alloy Steels - P-No. 3MechanicalPas encore d'évaluation