Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- HP 4142Document22 pagesHP 4142Edward ConalPas encore d'évaluation
- PL TonerDocument4 pagesPL TonerEdward ConalPas encore d'évaluation
- Hybrid Correlation PaperDocument6 pagesHybrid Correlation PaperEdward ConalPas encore d'évaluation
- Ed 190414Document363 pagesEd 190414Edward ConalPas encore d'évaluation
- Drop Service Locations For Datamini TabletsDocument106 pagesDrop Service Locations For Datamini TabletsEdward ConalPas encore d'évaluation
- Brio Contents v1-43Document26 pagesBrio Contents v1-43Edward ConalPas encore d'évaluation
- HP Surestore Dat40Document2 pagesHP Surestore Dat40Edward ConalPas encore d'évaluation
- Structure & Written Expression Post Test PDFDocument6 pagesStructure & Written Expression Post Test PDFEdward Conal100% (5)
- 9780545248853Document97 pages9780545248853Edward Conal0% (1)
- Powerpoint AmericanaDocument9 pagesPowerpoint AmericanaEdward ConalPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Work at Height Questions For Height PassDocument3 pagesWork at Height Questions For Height PassPravash Mohanty100% (1)
- Btree Practice ProbsDocument2 pagesBtree Practice ProbsAbyssman ManPas encore d'évaluation
- Csi Sap2000 Example 1-008Document4 pagesCsi Sap2000 Example 1-008Juan Pablo González CarballoPas encore d'évaluation
- SCELDocument46 pagesSCELzacklawsPas encore d'évaluation
- 5209 Aerospace T SealDocument20 pages5209 Aerospace T SealNicolasSuchPas encore d'évaluation
- Drive Test AnalysisDocument47 pagesDrive Test Analysis3a9aPas encore d'évaluation
- Crashing QuestionsDocument3 pagesCrashing QuestionsSYED ASGHAR ALI SULTANPas encore d'évaluation
- Machine Element Design CheatsheetDocument25 pagesMachine Element Design CheatsheetDarien ChiaPas encore d'évaluation
- Exercise 4.7: CH 4 SupplementalDocument12 pagesExercise 4.7: CH 4 SupplementalAngelica Diolata100% (1)
- Hydrogen Safety NFPADocument22 pagesHydrogen Safety NFPArome_n21100% (1)
- FTB - Fire Alarm Boq Take Off - 10-08-2022Document4 pagesFTB - Fire Alarm Boq Take Off - 10-08-2022Thai ChheanghourtPas encore d'évaluation
- 80312A-ENUS Error LogDocument10 pages80312A-ENUS Error LogSafdar HussainPas encore d'évaluation
- Column ChromatographyDocument9 pagesColumn ChromatographyMd Shahjalal Sagor67% (3)
- K.analysis of The Articulated Robotic Arm (TITLE DEFENCE)Document22 pagesK.analysis of The Articulated Robotic Arm (TITLE DEFENCE)sky4sterPas encore d'évaluation
- SOPM EmbraerDocument398 pagesSOPM EmbraerRener Junior100% (1)
- Tolerancia Pasador y BielaDocument1 pageTolerancia Pasador y BielaAlejandro ValenzuelaPas encore d'évaluation
- Teodoriu 2010Document13 pagesTeodoriu 2010JhormanPas encore d'évaluation
- SLAManualDocument187 pagesSLAManualfarhadhassan100% (1)
- Fire Hydrant System Design Installation Commisioning and TestingDocument5 pagesFire Hydrant System Design Installation Commisioning and Testingjaianit89Pas encore d'évaluation
- Call To Order: Pledge of AllegianceDocument269 pagesCall To Order: Pledge of AllegianceBrookhaven PostPas encore d'évaluation
- Android Notes by KillerDocument6 pagesAndroid Notes by KillerRavi RanjanPas encore d'évaluation
- 8×8 LED Matrix MAX7219 With Scrolling Text & Android Control Via BluetoothDocument15 pages8×8 LED Matrix MAX7219 With Scrolling Text & Android Control Via BluetoothakashlogicPas encore d'évaluation
- Comb - Chemkin - Format PDFDocument5 pagesComb - Chemkin - Format PDFMUHAMMAD FAREEZ IZWAN BIN ABDUL JALILPas encore d'évaluation
- Phychem Expt #2Document7 pagesPhychem Expt #2Candace AguilarPas encore d'évaluation
- Infinique Structured Cabling Installation ChecklistDocument2 pagesInfinique Structured Cabling Installation Checklistroot75% (4)
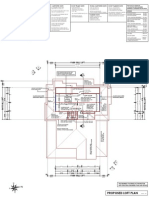
- LoftplanDocument1 pageLoftplanapi-228799117Pas encore d'évaluation
- Magnum Dxi13 Engine Torque Settings PDFDocument67 pagesMagnum Dxi13 Engine Torque Settings PDFbuchniyPas encore d'évaluation
- 08 Sep-603b Thol Ret 670Document9 pages08 Sep-603b Thol Ret 670m khPas encore d'évaluation
- Module 1: Introduction To Operating System: Need For An OSDocument18 pagesModule 1: Introduction To Operating System: Need For An OSshikha2012Pas encore d'évaluation
- CDMA APPLICATION FOR Child Name Inclusion-Before 1 Year PDFDocument2 pagesCDMA APPLICATION FOR Child Name Inclusion-Before 1 Year PDFAnonymous C0pl6hPas encore d'évaluation