Vous aimerez peut-être aussi
- Algo For Involute Octoidal Bevel Gear GenerationDocument9 pagesAlgo For Involute Octoidal Bevel Gear GenerationTanmay MathurPas encore d'évaluation
- Kinematics Simulation of The Cardan Shaft For InveDocument8 pagesKinematics Simulation of The Cardan Shaft For Invem.peighamiPas encore d'évaluation
- Differential Gear Box DesignDocument61 pagesDifferential Gear Box Designramkumar121Pas encore d'évaluation
- Kinematic Model of a Four Mecanum Wheeled Mobile RobotDocument4 pagesKinematic Model of a Four Mecanum Wheeled Mobile RobotalienkanibalPas encore d'évaluation
- Steering Geometry and Caster Measurement PDFDocument18 pagesSteering Geometry and Caster Measurement PDFVinayChikPas encore d'évaluation
- Gear Trains: 8.1. Angular Velocity RatioDocument16 pagesGear Trains: 8.1. Angular Velocity RatioaddisudagnePas encore d'évaluation
- IN 2020 AkashDocument12 pagesIN 2020 AkashSriram SundarPas encore d'évaluation
- Steering DesignDocument6 pagesSteering DesignAsif HussainPas encore d'évaluation
- Chapter 8. Other MechanismsDocument8 pagesChapter 8. Other MechanismsAshish SinglaPas encore d'évaluation
- Kinematics of Machines Prof. A.K.Mallik Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module No. # 09 Lecture No. # 04Document18 pagesKinematics of Machines Prof. A.K.Mallik Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module No. # 09 Lecture No. # 04Deepak ChaurasiaPas encore d'évaluation
- Linkage AnalysisDocument17 pagesLinkage AnalysisCharlene SmithPas encore d'évaluation
- Gear TrainsDocument40 pagesGear TrainssteevecPas encore d'évaluation
- 1998 by Tong and Yang - Generation of Identical Noncircular Pitch Curves 1Document5 pages1998 by Tong and Yang - Generation of Identical Noncircular Pitch Curves 1Dishant PandyaPas encore d'évaluation
- Inverse Optimal Design For Position Control of A QuadrotorDocument24 pagesInverse Optimal Design For Position Control of A QuadrotorMohadese RezaeiPas encore d'évaluation
- Gear Trains: Harold L Johnson, PH.DDocument16 pagesGear Trains: Harold L Johnson, PH.Dalvaromviegas_191514Pas encore d'évaluation
- Gear Trains - Lecture 10Document22 pagesGear Trains - Lecture 10priyankar007Pas encore d'évaluation
- Orientation Order Analysis of Spherical Four-Bar MechanismsDocument4 pagesOrientation Order Analysis of Spherical Four-Bar MechanismsSurya KiranPas encore d'évaluation
- Toothed Gearing Types and ApplicationsDocument35 pagesToothed Gearing Types and ApplicationsSomnath Somadder100% (1)
- Lab no 7 meen21101037Document8 pagesLab no 7 meen21101037Ali MunawarPas encore d'évaluation
- Epicyclical Gear Train System Lab ReportDocument15 pagesEpicyclical Gear Train System Lab ReportIbrahim Hussain50% (2)
- The Synthesis of Elliptical Gears Generated by Shaper-CuttersDocument9 pagesThe Synthesis of Elliptical Gears Generated by Shaper-CuttersBen TearlePas encore d'évaluation
- Motion Control of Segway Vehicle Using PID Backstepping Control MethodDocument6 pagesMotion Control of Segway Vehicle Using PID Backstepping Control MethodChetanraj D PatilPas encore d'évaluation
- Design and Fabrication of a Four Bar MechanismDocument42 pagesDesign and Fabrication of a Four Bar MechanismganeshPas encore d'évaluation
- Study of Strapdown Inertial Navigation Integration AlgorithmsDocument4 pagesStudy of Strapdown Inertial Navigation Integration AlgorithmstangphamvanPas encore d'évaluation
- Mechanics of Machines (314205) : Design, Fabrication and Analysis of Dual Can CrusherDocument10 pagesMechanics of Machines (314205) : Design, Fabrication and Analysis of Dual Can Crushersaqlain05Pas encore d'évaluation
- Railway Transition Curves Analysis - Gafitoi 2013Document14 pagesRailway Transition Curves Analysis - Gafitoi 2013Călin CâmpianuPas encore d'évaluation
- Mod 1 ContdDocument21 pagesMod 1 ContdpremquilonPas encore d'évaluation
- Ackermann Steering For Performance Race Cars PDFDocument22 pagesAckermann Steering For Performance Race Cars PDFr2d23Pas encore d'évaluation
- Planetary Gear: CS 285 Solid Modelling (FALL 2011) Eric Lu and Jessie JinDocument8 pagesPlanetary Gear: CS 285 Solid Modelling (FALL 2011) Eric Lu and Jessie JinAmanda StaceyPas encore d'évaluation
- Sterring MechanismDocument3 pagesSterring MechanismPrabu BalakrishnanPas encore d'évaluation
- Mathematical Model To Design Rack and Pinion Ackerman Steering GeomteryDocument5 pagesMathematical Model To Design Rack and Pinion Ackerman Steering GeomteryIntiGowthamSai100% (1)
- Trenes de Engranajes - PresentaciónDocument17 pagesTrenes de Engranajes - PresentaciónPedro Jorge De los SantosPas encore d'évaluation
- Chap-8 Gear TrainDocument18 pagesChap-8 Gear TrainAlysPas encore d'évaluation
- Epicyclic Gear Train ExperimentDocument6 pagesEpicyclic Gear Train Experimentshuyun88100% (6)
- Kinematics of Four-Wheel-Steering Vehicles: Forschung Im Ingenieurwesen May 2001Document7 pagesKinematics of Four-Wheel-Steering Vehicles: Forschung Im Ingenieurwesen May 2001sherif aboelnourPas encore d'évaluation
- Epicyclic Gear TrainDocument6 pagesEpicyclic Gear TrainLow Kian JinPas encore d'évaluation
- Project1 PulleySystemsDocument5 pagesProject1 PulleySystemsFinito TheEndPas encore d'évaluation
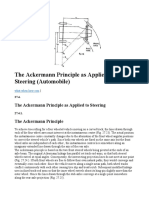
- What-When-How: The Ackermann Principle As Applied To Steering (Automobile)Document9 pagesWhat-When-How: The Ackermann Principle As Applied To Steering (Automobile)Pradyumn MangalPas encore d'évaluation
- Car Suspension Over BumpDocument23 pagesCar Suspension Over BumpVairasivam Karisna KumarPas encore d'évaluation
- Term Paper ClassicalDocument26 pagesTerm Paper ClassicalKazeem Lateefat TaiwoPas encore d'évaluation
- MTM 2Document28 pagesMTM 2RajendrakumarPas encore d'évaluation
- GEAR TRAINS (EPICYCLIC TRAINSDocument11 pagesGEAR TRAINS (EPICYCLIC TRAINSsbusisoPas encore d'évaluation
- ME 2213 (Gear Train)Document36 pagesME 2213 (Gear Train)tanvir2013004Pas encore d'évaluation
- Optimal Synthesis of A Single-Dwell 6-Bar Planar LinkageDocument7 pagesOptimal Synthesis of A Single-Dwell 6-Bar Planar LinkageInternational Journal of computational Engineering research (IJCER)Pas encore d'évaluation
- Modeling of A Rack and Pinion Steering Linkage Using Multi-Body DynamicsDocument6 pagesModeling of A Rack and Pinion Steering Linkage Using Multi-Body DynamicshadiPas encore d'évaluation
- Four Bar LinkageDocument9 pagesFour Bar LinkageAliceAlormenuPas encore d'évaluation
- ZF Automtic 8 SPDDocument14 pagesZF Automtic 8 SPDCiobanu Mihai100% (1)
- Design of Variable Coupler Curve Four-Bar Mechanisms: Ren-Chung Soong and Sun-Li WuDocument9 pagesDesign of Variable Coupler Curve Four-Bar Mechanisms: Ren-Chung Soong and Sun-Li WuAshokPas encore d'évaluation
- The Ackermann Principle as Applied to SteeringDocument7 pagesThe Ackermann Principle as Applied to SteeringPS ENGINEERINGPas encore d'évaluation
- INS AlgorithmsDocument6 pagesINS AlgorithmsversinePas encore d'évaluation
- Actuator Fault Detection System For A Mini-Quadrotor: A. Freddi, S. Longhi and A. MonteriùDocument6 pagesActuator Fault Detection System For A Mini-Quadrotor: A. Freddi, S. Longhi and A. MonteriùadilsondissoPas encore d'évaluation
- Other Mechanisms: Looking For GATE Preparation Material? Join & Get Here Now!Document7 pagesOther Mechanisms: Looking For GATE Preparation Material? Join & Get Here Now!Akash SoniPas encore d'évaluation
- Gear RatioDocument9 pagesGear RatioLekha SejpalPas encore d'évaluation
- Epicyclic Gear TrainDocument5 pagesEpicyclic Gear TrainRachan PanchePas encore d'évaluation
- Robot Manipulators: Modeling, Performance Analysis and ControlD'EverandRobot Manipulators: Modeling, Performance Analysis and ControlPas encore d'évaluation
- Planar Linkage Synthesis: A modern CAD based approachD'EverandPlanar Linkage Synthesis: A modern CAD based approachPas encore d'évaluation
- A Combined Use of Phase Plane and Handling Diagram Method To Study The Influence of Tyre and Vehicle Characteristics On StabilityDocument23 pagesA Combined Use of Phase Plane and Handling Diagram Method To Study The Influence of Tyre and Vehicle Characteristics On StabilityCillian ByrnePas encore d'évaluation
- Ackerman AnalysisDocument47 pagesAckerman AnalysisRudrendu Shekhar100% (1)
- 4bar SynthesisDocument18 pages4bar Synthesismburha100% (2)
- Analysis and Optimization of A Double Axel Steering Mechanism With Dynamic LoadsDocument14 pagesAnalysis and Optimization of A Double Axel Steering Mechanism With Dynamic LoadsCillian ByrnePas encore d'évaluation
- Raad - On The Influence of Anti-Roll Stiffness On VehicleDocument8 pagesRaad - On The Influence of Anti-Roll Stiffness On VehicleCillian ByrnePas encore d'évaluation
- Tau Commander R'AlaiDocument1 pageTau Commander R'AlaiRafen AxanPas encore d'évaluation
- Hazard and Operability Analysis (HAZOP) of A Plastic Manufacturing Plant at Karachi, PakistanDocument7 pagesHazard and Operability Analysis (HAZOP) of A Plastic Manufacturing Plant at Karachi, PakistanFaisal AkhterPas encore d'évaluation
- Final ReviewDocument104 pagesFinal Reviewzhou wangchaoPas encore d'évaluation
- M19 GPSA TermodinámicaDocument34 pagesM19 GPSA TermodinámicaSanchez LeilaPas encore d'évaluation
- SERVICEABILITYDocument75 pagesSERVICEABILITYÜstün Onur Baktır100% (1)
- Cressi-Sub Regulator User Manual: 1st Stage ComponentsDocument39 pagesCressi-Sub Regulator User Manual: 1st Stage ComponentsSergio GlezPas encore d'évaluation
- Abs PDFDocument2 pagesAbs PDFAdonis BasilioPas encore d'évaluation
- Implementing Turbulence Models Into The Compressible RANS EquationsDocument3 pagesImplementing Turbulence Models Into The Compressible RANS EquationsSiva RajPas encore d'évaluation
- Pumps and SystemsDocument5 pagesPumps and SystemsDhi AdhiPas encore d'évaluation
- Past Board Exam Problems in StaticsDocument15 pagesPast Board Exam Problems in Staticsherbulariojeeanne19Pas encore d'évaluation
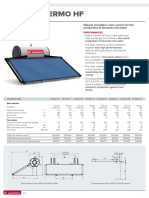
- Kairos Thermo HF Natural Circulation Solar System for Domestic Hot Water ProductionDocument4 pagesKairos Thermo HF Natural Circulation Solar System for Domestic Hot Water ProductionFILID MADPas encore d'évaluation
- Mechanical Sensors 25augustDocument74 pagesMechanical Sensors 25augustSasikumar SukumaranPas encore d'évaluation
- AP05.30-B-0560F.fm Valve Lash Adjustment 19.06.98Document4 pagesAP05.30-B-0560F.fm Valve Lash Adjustment 19.06.98LUKASPas encore d'évaluation
- Lab 2 HardnessDocument8 pagesLab 2 HardnessMuhammad Zulhilmi0% (1)
- Brixton BX-125 Motorcycle User ManualDocument49 pagesBrixton BX-125 Motorcycle User ManualCARLOS GONZALEZPas encore d'évaluation
- Brushless AlternatorDocument10 pagesBrushless AlternatorArun GouthamPas encore d'évaluation
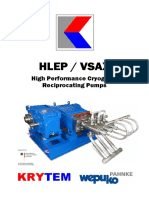
- Hlep / Vsax: High Performance Cryogenic Reciprocating PumpsDocument4 pagesHlep / Vsax: High Performance Cryogenic Reciprocating Pumpsbarun1977Pas encore d'évaluation
- Tractor Operator AgricultureDocument9 pagesTractor Operator AgricultureConstantin CarpenPas encore d'évaluation
- Trilectron DAC900 TMEverestDocument394 pagesTrilectron DAC900 TMEverestVictory GSEPas encore d'évaluation
- Ade 12 Physics Exercise 6 Page 135 144Document48 pagesAde 12 Physics Exercise 6 Page 135 144Hope AlforquePas encore d'évaluation
- InTech-Fluid Structure InteractionDocument23 pagesInTech-Fluid Structure InteractionDeepak MahapatraPas encore d'évaluation
- Certificado - Flange Adapter 125MM - XindaDocument3 pagesCertificado - Flange Adapter 125MM - XindaGR CarlosPas encore d'évaluation
- Summary On Uniaxial Ratchetting of 6061-T6 Aluminium AlloyDocument18 pagesSummary On Uniaxial Ratchetting of 6061-T6 Aluminium AlloyautalPas encore d'évaluation
- GARLOCK Gasket SheetsDocument59 pagesGARLOCK Gasket SheetsdanianishPas encore d'évaluation
- Vibration BookDocument152 pagesVibration Bookrez_babu7430Pas encore d'évaluation
- B-3801 IOM - Rev - 2011-09-02 (1) MidlandDocument23 pagesB-3801 IOM - Rev - 2011-09-02 (1) MidlandLucas MontePas encore d'évaluation
- Analysis of Arch Dams Using Coupled Trial LoadDocument10 pagesAnalysis of Arch Dams Using Coupled Trial LoadUzair Maqbool KhanPas encore d'évaluation
- Metsec Engineering Forms the FutureDocument24 pagesMetsec Engineering Forms the Futureshashank adigaPas encore d'évaluation
- Aluminium Using AFSDDocument12 pagesAluminium Using AFSDKinesys TechsolutionsPas encore d'évaluation
- Rectangular DuctDocument67 pagesRectangular DuctAUCE9802100% (3)