Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- DAY 2 - HW-Cubing Binomials and FactoringDocument3 pagesDAY 2 - HW-Cubing Binomials and FactoringSishira PattanPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Course Code and Title: Lesson Number: Topic:: Solve LP Problems Using Simplex Maximization MethodDocument10 pagesCourse Code and Title: Lesson Number: Topic:: Solve LP Problems Using Simplex Maximization MethodJessaPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Pretest-FACTORING POLYNOMIALSDocument2 pagesPretest-FACTORING POLYNOMIALSCharlene Grace BronolaPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Lecture 2Document18 pagesLecture 2Muhammad Tarif HasanPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Application of A Dual Simplex Method To Transportation Problem To Minimize The CostDocument5 pagesApplication of A Dual Simplex Method To Transportation Problem To Minimize The CostInternational Journal of Innovations in Engineering and SciencePas encore d'évaluation
- POLYNOMIALS (Final Done)Document35 pagesPOLYNOMIALS (Final Done)Anisha PanditPas encore d'évaluation
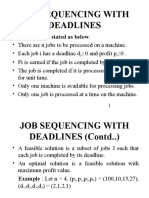
- Job Sequencing With Deadlines: The Problem Is Stated As BelowDocument24 pagesJob Sequencing With Deadlines: The Problem Is Stated As BelowVijay TrivediPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Greedy AlgorithmDocument35 pagesGreedy AlgorithmMd. Mosfikur RahmanPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Multiresolution Analysis and Wavelet Bases: OutlineDocument41 pagesMultiresolution Analysis and Wavelet Bases: OutlinerahumanPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Rational Zero Theorem, Factoring Polynomials, and Polynomial EquationsDocument25 pagesRational Zero Theorem, Factoring Polynomials, and Polynomial Equationsjohn kennethPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Decimal SearchDocument5 pagesDecimal SearchShafakutPas encore d'évaluation
- 6 MOLP and Goal ProgrammingDocument30 pages6 MOLP and Goal ProgrammingCrypto GeniusPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Chapter 07Document20 pagesChapter 07richaPas encore d'évaluation
- Num Block 1 Unit 3Document37 pagesNum Block 1 Unit 3Ramesh KonakallaPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Lecture 5: Big-M Method and Two-Phase Method: Lecturer: Lily PANDocument9 pagesLecture 5: Big-M Method and Two-Phase Method: Lecturer: Lily PANLauraPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- MAN 327 2.0 Micro-Computers & Their Applications Group AssignmentDocument7 pagesMAN 327 2.0 Micro-Computers & Their Applications Group AssignmentMilan LahiruPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- M4. Finding Roots of EquationsDocument7 pagesM4. Finding Roots of EquationsRochelle TugadePas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Introduction To Numerical Analysis: Riham K. AhmedDocument8 pagesIntroduction To Numerical Analysis: Riham K. AhmedMohammed elsadig OsmanPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Secant and Modify Secant Method: Prum Sophearith E20170706Document11 pagesSecant and Modify Secant Method: Prum Sophearith E20170706rithPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Polynomials - Practice Sheet 01 - (10th Board Booster 2024)Document6 pagesPolynomials - Practice Sheet 01 - (10th Board Booster 2024)sohailmohammed077Pas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Factorización de PolinomiosDocument27 pagesFactorización de PolinomiosEdwin LlantoyPas encore d'évaluation
- Direct Search MethodsDocument32 pagesDirect Search Methodsmrudul patelPas encore d'évaluation
- Practical ModellingDocument4 pagesPractical ModellingBright MuzaPas encore d'évaluation
- Numerical Analysis: Lecture - 3Document17 pagesNumerical Analysis: Lecture - 3khizarPas encore d'évaluation
- Lesson 13 - Additional ProblemsDocument16 pagesLesson 13 - Additional Problemskismat boyPas encore d'évaluation
- PolynomialsDocument58 pagesPolynomialsMATHEMATICS GURUPas encore d'évaluation
- MGOC10 - Review Problems - Chapters 4, 6, 7 & 13 - Solution - Fall2020Document6 pagesMGOC10 - Review Problems - Chapters 4, 6, 7 & 13 - Solution - Fall2020CovidPas encore d'évaluation
- Latihan Lab Statistik - 1Document6 pagesLatihan Lab Statistik - 1Alma AuliaPas encore d'évaluation
- Irregular Types of LP Models: Dr. Sania BhattiDocument16 pagesIrregular Types of LP Models: Dr. Sania BhattiLatest GadgetsPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Lab 8. Numerical Differentiation: 1 InstructionsDocument3 pagesLab 8. Numerical Differentiation: 1 InstructionsSEBASTIAN RODRIGUEZPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)