Vous aimerez peut-être aussi
- 01 7.1 Distributions 13-14Document33 pages01 7.1 Distributions 13-14BobPas encore d'évaluation
- 10 FM 1 TN 1ppDocument101 pages10 FM 1 TN 1ppBobPas encore d'évaluation
- Calc 1141 2Document27 pagesCalc 1141 2BobPas encore d'évaluation
- 301 302 303 X03mapDocument1 page301 302 303 X03mapKyungJun ShinPas encore d'évaluation
- ch19 3Document40 pagesch19 3BobPas encore d'évaluation
- ACTL4001 Lecture 11Document12 pagesACTL4001 Lecture 11BobPas encore d'évaluation
- 01 7.1 Distributions 13-14-0 PDF Week 7 New VersionDocument21 pages01 7.1 Distributions 13-14-0 PDF Week 7 New VersionBobPas encore d'évaluation
- ch19 5Document6 pagesch19 5BobPas encore d'évaluation
- (Carmona R.a.) Interest Rate ModelsDocument58 pages(Carmona R.a.) Interest Rate ModelsBobPas encore d'évaluation
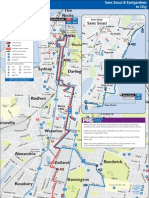
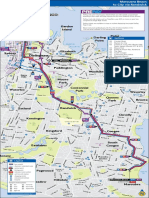
- Maroubra Beach to City via RandwickDocument1 pageMaroubra Beach to City via RandwickBobPas encore d'évaluation
- Linear Algebra Done WrongDocument231 pagesLinear Algebra Done WrongS NandaPas encore d'évaluation
- Linear Algebra Done WrongDocument231 pagesLinear Algebra Done WrongS NandaPas encore d'évaluation
- History of The Actuarial ProfessionDocument3 pagesHistory of The Actuarial ProfessionBobPas encore d'évaluation
- Maroubra Beach to City bus timetable via RandwickDocument19 pagesMaroubra Beach to City bus timetable via RandwickBobPas encore d'évaluation
- 301 302 303 X03mapDocument1 page301 302 303 X03mapKyungJun ShinPas encore d'évaluation
- Is Insurance A Luxury?Document3 pagesIs Insurance A Luxury?BobPas encore d'évaluation
- Signs of Ageing: HealthcareDocument2 pagesSigns of Ageing: HealthcareBobPas encore d'évaluation
- Maroubra Beach to City bus timetable via RandwickDocument19 pagesMaroubra Beach to City bus timetable via RandwickBobPas encore d'évaluation
- ch4 1Document42 pagesch4 1BobPas encore d'évaluation
- Global Financial Crisis Actuary PerspectiveDocument3 pagesGlobal Financial Crisis Actuary PerspectiveBobPas encore d'évaluation
- Takaful: An Islamic Alternative To Conventional Insurance Sees Phenomenal GrowthDocument3 pagesTakaful: An Islamic Alternative To Conventional Insurance Sees Phenomenal GrowthBobPas encore d'évaluation
- Maroubra Beach to City via RandwickDocument1 pageMaroubra Beach to City via RandwickBobPas encore d'évaluation
- International: 2020 VisionDocument5 pagesInternational: 2020 VisionBobPas encore d'évaluation
- It's Time To Abolish Retirement (And Here's How To Do It) .: Work, Learn and Play Till You DropDocument47 pagesIt's Time To Abolish Retirement (And Here's How To Do It) .: Work, Learn and Play Till You DropBobPas encore d'évaluation
- Pension Benefit Design: Flexibility and The Integration of Insurance Over The Life CycleDocument43 pagesPension Benefit Design: Flexibility and The Integration of Insurance Over The Life CycleBobPas encore d'évaluation
- DRAFT STANDARDS FOR DEVELOPING SPREADSHEETSDocument5 pagesDRAFT STANDARDS FOR DEVELOPING SPREADSHEETSBobPas encore d'évaluation
- Chapter 4 Exercise Solutions SpreadsheetDocument5 pagesChapter 4 Exercise Solutions SpreadsheetBobPas encore d'évaluation
- ch4 5Document37 pagesch4 5BobPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Differentiation SS2Document88 pagesDifferentiation SS2merezemenike272Pas encore d'évaluation
- DOW™ HDPE 05962B: High Density Polyethylene ResinDocument3 pagesDOW™ HDPE 05962B: High Density Polyethylene ResinFredo NLPas encore d'évaluation
- EVS XT2+ Tech Ref Software Manual v10.03 PDFDocument80 pagesEVS XT2+ Tech Ref Software Manual v10.03 PDFgibonulPas encore d'évaluation
- ZJJ 3Document23 pagesZJJ 3jananiwimukthiPas encore d'évaluation
- British and American Culture Marking RubricDocument5 pagesBritish and American Culture Marking RubricAn Ho LongPas encore d'évaluation
- Event ReportDocument2 pagesEvent Reportakshitdaharwal997Pas encore d'évaluation
- Nelson Sanchez GE Module October 2020Document92 pagesNelson Sanchez GE Module October 2020Nneg Gray0% (1)
- Linear Piston Actuators: by Sekhar Samy, CCI, and Dave Stemler, CCIDocument18 pagesLinear Piston Actuators: by Sekhar Samy, CCI, and Dave Stemler, CCIapi-3854910Pas encore d'évaluation
- Independence Day Resurgence ScriptDocument60 pagesIndependence Day Resurgence ScriptdavidPas encore d'évaluation
- Hearing God Through Biblical Meditation - 1 PDFDocument20 pagesHearing God Through Biblical Meditation - 1 PDFAlexander PeñaPas encore d'évaluation
- Solution Manual For Contemporary Project Management 4th EditionDocument15 pagesSolution Manual For Contemporary Project Management 4th EditionDanaAllendzcfa100% (77)
- Timoshenko Beam TheoryDocument8 pagesTimoshenko Beam Theoryksheikh777Pas encore d'évaluation
- Monetary System 1Document6 pagesMonetary System 1priyankabgPas encore d'évaluation
- As 2710-1984 Screw Gauges - VerificationDocument7 pagesAs 2710-1984 Screw Gauges - VerificationSAI Global - APACPas encore d'évaluation
- (The Heritage Library of African Peoples) Tiyambe Zeleza - Akamba-The Rosen Publishing Group (1995)Document72 pages(The Heritage Library of African Peoples) Tiyambe Zeleza - Akamba-The Rosen Publishing Group (1995)BlackFlix Legendas em PortuguêsPas encore d'évaluation
- Resistance and ResisivityDocument2 pagesResistance and ResisivityDeddy KismanaPas encore d'évaluation
- Carmina GadelicaDocument37 pagesCarmina GadelicaoniricsPas encore d'évaluation
- Asian Games African Games: Beach VolleyballDocument5 pagesAsian Games African Games: Beach VolleyballJessan Ybañez JorePas encore d'évaluation
- Community Development A Critical Approach PDFDocument2 pagesCommunity Development A Critical Approach PDFNatasha50% (2)
- Picco Tac 1095 N Hydrocarbon ResinDocument2 pagesPicco Tac 1095 N Hydrocarbon ResindevanandamqaPas encore d'évaluation
- SBFP Timeline 2019Document1 pageSBFP Timeline 2019Marlon Berjolano Ere-erPas encore d'évaluation
- Bibliography PresocraticsDocument10 pagesBibliography Presocraticsalraun66Pas encore d'évaluation
- JC Metcalfe - The Power of WeaknessDocument3 pagesJC Metcalfe - The Power of Weaknesschopin23Pas encore d'évaluation
- We Generally View Objects As Either Moving or Not MovingDocument11 pagesWe Generally View Objects As Either Moving or Not MovingMarietoni D. QueseaPas encore d'évaluation
- FAI - Assignment Sheet (Both Assignments)Document5 pagesFAI - Assignment Sheet (Both Assignments)Wilson WongPas encore d'évaluation
- Exploratory Data Analysis: M. SrinathDocument19 pagesExploratory Data Analysis: M. SrinathromaPas encore d'évaluation
- Kashmira Karim Charaniya's ResumeDocument3 pagesKashmira Karim Charaniya's ResumeMegha JainPas encore d'évaluation
- Manufacturing Tech-1Document6 pagesManufacturing Tech-1Vikram Rao0% (1)
- Introduction To The Philosophy of The Human Person Quarter I - Module 2Document26 pagesIntroduction To The Philosophy of The Human Person Quarter I - Module 2Katrina TulaliPas encore d'évaluation
- List of SQAC DQAC SISC DISC 2019 20Document39 pagesList of SQAC DQAC SISC DISC 2019 20Shweta jainPas encore d'évaluation