Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Led Monitor: Service ManualDocument16 pagesLed Monitor: Service ManualabdelkaderPas encore d'évaluation
- Fixed Holidays 2017 (8) : Day Date Holiday Mumbai Gurgaon BangaloreDocument1 pageFixed Holidays 2017 (8) : Day Date Holiday Mumbai Gurgaon BangaloreVindraj ChopdekarPas encore d'évaluation
- RBI Assistant Computer Questions From 2013 ExamDocument6 pagesRBI Assistant Computer Questions From 2013 ExamRizz AhammadPas encore d'évaluation
- Questionnaire on improving business communication skillsDocument2 pagesQuestionnaire on improving business communication skillsVindraj ChopdekarPas encore d'évaluation
- Question Bank (2 Marks Questions)Document2 pagesQuestion Bank (2 Marks Questions)Vindraj ChopdekarPas encore d'évaluation
- AcctountancyDocument368 pagesAcctountancyvignesh100% (1)
- QB5Document2 pagesQB5Vindraj ChopdekarPas encore d'évaluation
- Eco Project Mcom Sem 2Document32 pagesEco Project Mcom Sem 2Vindraj ChopdekarPas encore d'évaluation
- Std12 Acct emDocument4 pagesStd12 Acct emVindraj ChopdekarPas encore d'évaluation
- Organizational Behavior Research ProjectDocument1 pageOrganizational Behavior Research ProjectBibarg KhanPas encore d'évaluation
- QB7Document2 pagesQB7Vindraj ChopdekarPas encore d'évaluation
- 2 Marks QuestionsDocument1 page2 Marks QuestionsVindraj ChopdekarPas encore d'évaluation
- QB4Document2 pagesQB4Vindraj ChopdekarPas encore d'évaluation
- QB 1Document1 pageQB 1Vindraj ChopdekarPas encore d'évaluation
- Questionnaire Give Answers: (2 Marks)Document1 pageQuestionnaire Give Answers: (2 Marks)Vindraj ChopdekarPas encore d'évaluation
- Subject: Principles of Management Topic: Types of OrganisationDocument34 pagesSubject: Principles of Management Topic: Types of OrganisationVindraj ChopdekarPas encore d'évaluation
- ENCE 603 Management Science Applications in Project Management Lectures 5-7Document70 pagesENCE 603 Management Science Applications in Project Management Lectures 5-7Vindraj ChopdekarPas encore d'évaluation
- Branch & BoundDocument8 pagesBranch & BoundvijaydhPas encore d'évaluation
- Bank LettersDocument9 pagesBank LettersVindraj ChopdekarPas encore d'évaluation
- Banking Correspondence and Insurance LettersDocument76 pagesBanking Correspondence and Insurance LettersVindraj ChopdekarPas encore d'évaluation
- Eligibility CertificateDocument10 pagesEligibility CertificateVindraj ChopdekarPas encore d'évaluation
- IpoDocument24 pagesIpoVindraj ChopdekarPas encore d'évaluation
- Android OS: Name: Ganesh Waghmare University Exam No.: T3384333Document28 pagesAndroid OS: Name: Ganesh Waghmare University Exam No.: T3384333ganeshwaghmare71100% (1)
- UntitledDocument8 pagesUntitledVindraj ChopdekarPas encore d'évaluation
- Introduction To APIs - GeeksforGeeksDocument6 pagesIntroduction To APIs - GeeksforGeeksAyman SaberPas encore d'évaluation
- 3983EID-346 Compiler Question PaperDocument2 pages3983EID-346 Compiler Question PapervittalPas encore d'évaluation
- System Specifications For Multinode G7 Platforms: Platform ANYDocument42 pagesSystem Specifications For Multinode G7 Platforms: Platform ANYAdi YusupPas encore d'évaluation
- Python Programming 19-06-2023Document124 pagesPython Programming 19-06-2023Jitendra Singh KushwahPas encore d'évaluation
- Calibrating Your 3D Printer Using Minimal FilamentDocument18 pagesCalibrating Your 3D Printer Using Minimal FilamentclydejamesPas encore d'évaluation
- Threads and Runnable Interface QuestionsDocument18 pagesThreads and Runnable Interface QuestionsManish Singh SuryavanshiPas encore d'évaluation
- Angin-2019-Big Data Analytics For Cyber SecuriDocument3 pagesAngin-2019-Big Data Analytics For Cyber SecuriArmando Rafael Fonseca ZuritaPas encore d'évaluation
- Question No.1: Write The Steps To: Create CompanyDocument15 pagesQuestion No.1: Write The Steps To: Create Companykoshalk88% (8)
- Manual Programación Agilent 6813B PDFDocument187 pagesManual Programación Agilent 6813B PDFrafaelcbscribdPas encore d'évaluation
- TracexDocument787 pagesTracexCelek KamuPas encore d'évaluation
- 8 Ways Digital Teachers Prepare Students for Global EconomyDocument11 pages8 Ways Digital Teachers Prepare Students for Global EconomyAna Marie TagayunPas encore d'évaluation
- Encrypted QR Code Hotel Check-in and Access Control SystemDocument9 pagesEncrypted QR Code Hotel Check-in and Access Control SystemEliecer ValdespinoPas encore d'évaluation
- Punycode Es6Document8 pagesPunycode Es6TodDynHØ UtKzPas encore d'évaluation
- Pokayoke WarehouseDocument11 pagesPokayoke WarehousehgiPas encore d'évaluation
- Automatic Skin Cancer Detection in Dermoscopy Images Based On Ensemble Lightweight Deep Learning NetworkDocument15 pagesAutomatic Skin Cancer Detection in Dermoscopy Images Based On Ensemble Lightweight Deep Learning Networkz123Pas encore d'évaluation
- Polynomial Unit Learning Objective 1Document15 pagesPolynomial Unit Learning Objective 1api-296658056Pas encore d'évaluation
- Chapter 3 Sampling MethodsDocument46 pagesChapter 3 Sampling Methodstemesgen yohannesPas encore d'évaluation
- ValveLink VL2000Document176 pagesValveLink VL2000hrtoro100% (1)
- Available BusyBox CommandsDocument45 pagesAvailable BusyBox CommandsSlyfester KurniawanPas encore d'évaluation
- C++ Quiz Code ProjectDocument3 pagesC++ Quiz Code ProjectMSPas encore d'évaluation
- IITM AppDev QUIZ 3Document127 pagesIITM AppDev QUIZ 3ShreyaPas encore d'évaluation
- Electronic Marketing ChannelsDocument25 pagesElectronic Marketing ChannelsSurbhî GuptaPas encore d'évaluation
- INTERTANKO Vetting Committee 26.05.2022Document29 pagesINTERTANKO Vetting Committee 26.05.2022soner100% (1)
- Section/Rate Control Kit Installation Guide: Kit: Sect Rate CTRL Apache 20 Series P/N 911-0011-000Document7 pagesSection/Rate Control Kit Installation Guide: Kit: Sect Rate CTRL Apache 20 Series P/N 911-0011-000Ronald Choque CopagiraPas encore d'évaluation
- SlidesDocument189 pagesSlidesPaúl ZambranoPas encore d'évaluation
- Microprocessor Microcontroller EXAM 2021Document5 pagesMicroprocessor Microcontroller EXAM 2021Rene EBUNLE AKUPANPas encore d'évaluation
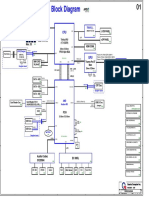
- 15.6" ZRP Block Diagram: Memory DownDocument47 pages15.6" ZRP Block Diagram: Memory DownMihohohoPas encore d'évaluation
- CMMP AsDocument111 pagesCMMP AsplacintaruPas encore d'évaluation