Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Page 33Document4 pagesPage 33Raj VenugopalPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Kamba Ramayanam Page 21Document4 pagesKamba Ramayanam Page 21Raj VenugopalPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Page 9 PDFDocument4 pagesPage 9 PDFRaj VenugopalPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Kamba Ramayanam Page 17Document4 pagesKamba Ramayanam Page 17Raj VenugopalPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Kamba Ramayanam Page 25Document4 pagesKamba Ramayanam Page 25Raj VenugopalPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- KolaipadaiDocument65 pagesKolaipadaiRaj VenugopalPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Kamba Ramayanam Page 13Document4 pagesKamba Ramayanam Page 13Raj VenugopalPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Kamba Ramayanam Page 1Document4 pagesKamba Ramayanam Page 1Raj VenugopalPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Kamba RamayanamDocument84 pagesKamba RamayanamRaj VenugopalPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Tasm ManualDocument29 pagesTasm ManualRaj VenugopalPas encore d'évaluation
- Page 5 PDFDocument4 pagesPage 5 PDFRaj VenugopalPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- 001 Valmiki Ramayan in Tamil Part 1 PDFDocument101 pages001 Valmiki Ramayan in Tamil Part 1 PDFRaj Venugopal100% (1)
- Page 9 PDFDocument4 pagesPage 9 PDFRaj VenugopalPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Chris Christie's Wordless Screaming - The Washington Post PDFDocument3 pagesChris Christie's Wordless Screaming - The Washington Post PDFRaj VenugopalPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Levelling and LoundnessDocument12 pagesLevelling and LoundnessRaj VenugopalPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
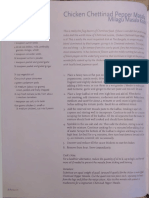
- Chicken Chettinad Pepper: If That People at PepperDocument1 pageChicken Chettinad Pepper: If That People at PepperRaj VenugopalPas encore d'évaluation
- Products Feature MatrixDocument24 pagesProducts Feature MatrixHassan YousifPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Complex Numbers - Mathematics of The DFTDocument13 pagesComplex Numbers - Mathematics of The DFTRaj VenugopalPas encore d'évaluation
- Ashtavakra Gita - Bart MarshallDocument60 pagesAshtavakra Gita - Bart Marshallமோகன் புதுவைPas encore d'évaluation
- VCL Unicode MigrationDocument39 pagesVCL Unicode MigrationRaj VenugopalPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Sampling TheoryDocument27 pagesSampling TheoryAtabat AduduPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- How Digital Filters Affect Analog Audio Signal Levels TI Slyt375Document9 pagesHow Digital Filters Affect Analog Audio Signal Levels TI Slyt375Raj VenugopalPas encore d'évaluation
- Eece 522 Notes - 06 CH - 3cDocument16 pagesEece 522 Notes - 06 CH - 3ckarim2005Pas encore d'évaluation
- ParameqdemoDocument11 pagesParameqdemoRaj VenugopalPas encore d'évaluation
- Understanding The Basis of The Kalman Filter PDFDocument5 pagesUnderstanding The Basis of The Kalman Filter PDFRenato T. AlmeidaPas encore d'évaluation
- TheFundamentalConflictsBetweenIslamAndQadiyaniyatByShaykhMuhammadIdreesKandhelvir ADocument24 pagesTheFundamentalConflictsBetweenIslamAndQadiyaniyatByShaykhMuhammadIdreesKandhelvir AMoulana Mohammad Musa ShakirPas encore d'évaluation
- Eece 522 Notes - 30 CH - 13bDocument17 pagesEece 522 Notes - 30 CH - 13bkarim2005Pas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Ivory Towers On SandDocument152 pagesIvory Towers On SandJarmitage123Pas encore d'évaluation
- Installation InstructionsDocument3 pagesInstallation InstructionsRosaLovaPas encore d'évaluation
- Power GenerationDocument34 pagesPower GenerationTaufiq AkbarPas encore d'évaluation
- Campus Invitation Letter - Sample 2Document1 pageCampus Invitation Letter - Sample 2sitaram shindePas encore d'évaluation
- HS GB 3109 PQ 12 Drive ElectronicsDocument7 pagesHS GB 3109 PQ 12 Drive Electronicsphankhoa83Pas encore d'évaluation
- Contoh Ringkasan Mengajar Bahasa Inggeris Tahun 2 Dan 3Document2 pagesContoh Ringkasan Mengajar Bahasa Inggeris Tahun 2 Dan 3Izla MajidPas encore d'évaluation
- 4 Ataxle PDFDocument22 pages4 Ataxle PDFAnonymous XTkln6H100% (1)
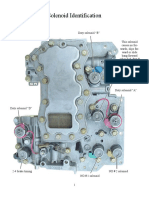
- Automatic Transmission: Models FA and FB With Allison AT542Document22 pagesAutomatic Transmission: Models FA and FB With Allison AT542nguyenxuanvinhv3Pas encore d'évaluation
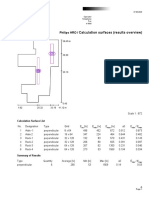
- Calculation Surfaces (Results Overview) : Philips HRODocument4 pagesCalculation Surfaces (Results Overview) : Philips HROsanaPas encore d'évaluation
- Ford Fiesta Specifications: Exterior DimensionsDocument2 pagesFord Fiesta Specifications: Exterior DimensionsBuhuntuUhuPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- TD Operation MaintenanceDocument51 pagesTD Operation MaintenanceHassam Ahmad100% (1)
- Introduction To Boltzmann LearningDocument2 pagesIntroduction To Boltzmann LearningnvbondPas encore d'évaluation
- Installation Manual - BM-BE - 1212Document2 pagesInstallation Manual - BM-BE - 1212Lit Phen TuPas encore d'évaluation
- Priorities For Access To HealthDocument25 pagesPriorities For Access To HealthsvpadillaPas encore d'évaluation
- SP2000 COD Testkits 2014Document5 pagesSP2000 COD Testkits 2014Andres FalmacelPas encore d'évaluation
- Swiss FCM Ordinance - EuPIA QDocument6 pagesSwiss FCM Ordinance - EuPIA Qiz_nazPas encore d'évaluation
- BPO Ricario2Document2 pagesBPO Ricario2Jalen RossPas encore d'évaluation
- A-Class Mark II: Print Engines For ApplicatorsDocument25 pagesA-Class Mark II: Print Engines For ApplicatorsJeffery ReynoldsPas encore d'évaluation
- Optimized Design of A Bagasse Dryer System For The Sugar IndustryDocument6 pagesOptimized Design of A Bagasse Dryer System For The Sugar IndustryTJ BolorPas encore d'évaluation
- 197389-Daewoo Doosan DX340LCA EPC PDFDocument577 pages197389-Daewoo Doosan DX340LCA EPC PDFAlbertus Bertie Geldenhuys100% (2)
- Fastcap 22 630v PDFDocument1 pageFastcap 22 630v PDFDarrenPas encore d'évaluation
- Software Project Engineer in Richland Kennewick Pasco WA Resume Robert VeklotzDocument2 pagesSoftware Project Engineer in Richland Kennewick Pasco WA Resume Robert VeklotzRobertVeklotzPas encore d'évaluation
- Tkinter GUI Programming by ExampleDocument374 pagesTkinter GUI Programming by ExampleArphan Desoja100% (5)
- Growth of Escherichia Coli in A 5 Litre Batch Fermentation VesselDocument15 pagesGrowth of Escherichia Coli in A 5 Litre Batch Fermentation VesselAs'ad Mughal100% (2)
- Diff BW CBO and RBODocument2 pagesDiff BW CBO and RBORamreddy BollaPas encore d'évaluation
- Tata MotorsDocument9 pagesTata MotorsNaim Ahmed SisirPas encore d'évaluation
- Linked List: Singly, Doubly and CircularDocument53 pagesLinked List: Singly, Doubly and CircularMia SamPas encore d'évaluation
- CVDocument21 pagesCVAngelica chea NatividadPas encore d'évaluation
- Est-Pergola Octogonal 21-03-2022Document1 pageEst-Pergola Octogonal 21-03-2022Victor MuñozPas encore d'évaluation
- SFTP Certificate Handling in BISDocument18 pagesSFTP Certificate Handling in BISkemoT1990TM100% (1)
- ETG3000 BrochureDocument9 pagesETG3000 BrochureMayolo MartinezPas encore d'évaluation
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchD'EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchÉvaluation : 4 sur 5 étoiles4/5 (10)
- SketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyD'EverandSketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyÉvaluation : 1.5 sur 5 étoiles1.5/5 (2)
- Beginning AutoCAD® 2020 Exercise WorkbookD'EverandBeginning AutoCAD® 2020 Exercise WorkbookÉvaluation : 2.5 sur 5 étoiles2.5/5 (3)