Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Panasonic nnsd297s Service Manual 120889Document31 pagesPanasonic nnsd297s Service Manual 120889Pan SairaPas encore d'évaluation
- Designand Construtionofthe Coreless Induction FurnaceDocument91 pagesDesignand Construtionofthe Coreless Induction FurnaceUma Koduri100% (1)
- Solar Inverter UNO-DM-3.3/4.0/4.6/5.0 Tl-Plus-Q: From 3.3 To 5.0 KWDocument4 pagesSolar Inverter UNO-DM-3.3/4.0/4.6/5.0 Tl-Plus-Q: From 3.3 To 5.0 KWArjunPas encore d'évaluation
- Lecture 11Document14 pagesLecture 11Pranav KharbandaPas encore d'évaluation
- MODULE 3 Electrical FundamentalsDocument150 pagesMODULE 3 Electrical Fundamentalsmr daie0% (1)
- Design & Sizing of Stand-Alone Solar Power Systems A House IraqDocument7 pagesDesign & Sizing of Stand-Alone Solar Power Systems A House IraqHamidPas encore d'évaluation
- DSASW0071941Document68 pagesDSASW0071941ali mohammedPas encore d'évaluation
- Apm MDM Tech Riello UpsDocument49 pagesApm MDM Tech Riello UpsCristian AlmeidaPas encore d'évaluation
- PVS980-MWS Megawatt Station Flyer 3AXD50000042986 RevC EN LowresDocument4 pagesPVS980-MWS Megawatt Station Flyer 3AXD50000042986 RevC EN LowresSenthil KumarPas encore d'évaluation
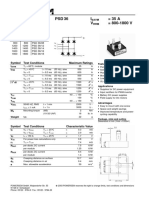
- Three Phase PSD 36 I 35 A Rectifier Bridges V 800-1800 VDocument2 pagesThree Phase PSD 36 I 35 A Rectifier Bridges V 800-1800 VInbanesan AkPas encore d'évaluation
- Amarraj 2020Document6 pagesAmarraj 2020rock starPas encore d'évaluation
- CPac (Mr. Slim) R410a CatalogDocument15 pagesCPac (Mr. Slim) R410a CataloghivnPas encore d'évaluation
- B9000UKDocument4 pagesB9000UKTolga AktaşPas encore d'évaluation
- User Manual - Hybrid Inverter - GREEN POINTDocument30 pagesUser Manual - Hybrid Inverter - GREEN POINTSOLUCIONES ENERGETICAS Y PROCESOS INNOVADORES100% (2)
- Service Manual: Viewsonic Ve710B/S-1Document47 pagesService Manual: Viewsonic Ve710B/S-1AndreyPas encore d'évaluation
- Technical Standard For SolarDocument44 pagesTechnical Standard For SolarAbhinav SinhaPas encore d'évaluation
- VD SeriesDocument4 pagesVD SeriesintrudentalertPas encore d'évaluation
- Workshop ManualDocument7 707 pagesWorkshop ManualOdrac IrcasanPas encore d'évaluation
- Coutline1533 NewDocument2 pagesCoutline1533 NewKen OhPas encore d'évaluation
- DIY Solar Projects - Eric SmithDocument161 pagesDIY Solar Projects - Eric SmithsezaitanyoluPas encore d'évaluation
- Anern Hybrid Solar Inverter Specification & Price List 5500WDocument1 pageAnern Hybrid Solar Inverter Specification & Price List 5500WErjon OsmanajPas encore d'évaluation
- Lecture - 5: DC-AC Converters: Ug - ProgramDocument54 pagesLecture - 5: DC-AC Converters: Ug - ProgramArife AbdulkerimPas encore d'évaluation
- Helix: Operating Instructions and Parts List Spring Assembler ModelDocument32 pagesHelix: Operating Instructions and Parts List Spring Assembler ModelPranavPas encore d'évaluation
- On Board Charging of Electric VehicleDocument11 pagesOn Board Charging of Electric Vehicleomkar chitnisPas encore d'évaluation
- Suzuki Diagnosis System-II Operation ManualDocument83 pagesSuzuki Diagnosis System-II Operation ManualMahesh RodgePas encore d'évaluation
- Drive System Rexroth IndradriveDocument144 pagesDrive System Rexroth IndradriveemilioPas encore d'évaluation
- Power Quality Enhancement Using Grid Connected PV InverterDocument9 pagesPower Quality Enhancement Using Grid Connected PV InverterZahira Javed RPas encore d'évaluation
- Inverters List 140305Document72 pagesInverters List 140305api-249372509Pas encore d'évaluation
- BITS Pilani ENI E&I BE-EIE Courses Description PDFDocument7 pagesBITS Pilani ENI E&I BE-EIE Courses Description PDFtarang27100% (1)
- Series DT4200E16-2YMDocument20 pagesSeries DT4200E16-2YMraza14pkPas encore d'évaluation