Vous aimerez peut-être aussi
- Passive Voice (30-09-2012)Document39 pagesPassive Voice (30-09-2012)kukulkan9Pas encore d'évaluation
- Common Derivatives IntegralsDocument4 pagesCommon Derivatives Integralsapi-243574449Pas encore d'évaluation
- 2340Document3 pages2340kukulkan9Pas encore d'évaluation
- Is-Is Routing ProtocolDocument27 pagesIs-Is Routing Protocolkukulkan9Pas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Mi TV Tigo PDFDocument21 pagesMi TV Tigo PDFGiuseppe OspinaPas encore d'évaluation
- Opt Data Preview Scoperef LISTOFISDocument1 368 pagesOpt Data Preview Scoperef LISTOFISlokeshwarachary3620Pas encore d'évaluation
- HG240641Document1 pageHG240641sdk00Pas encore d'évaluation
- Research ProposalDocument4 pagesResearch ProposalKeyan HassanPas encore d'évaluation
- 61187003e1-8 Ta5006Document2 pages61187003e1-8 Ta5006Ian AbadiPas encore d'évaluation
- Computer GenerationsDocument15 pagesComputer GenerationsnavalPas encore d'évaluation
- AZD Manual v4.0Document31 pagesAZD Manual v4.0vijayraju50% (2)
- Sensitive Earth Fault RelayDocument10 pagesSensitive Earth Fault RelaychanaksPas encore d'évaluation
- Pitfalls and Fallacies: Targeting A Bleeding-Edge ProcessDocument1 pagePitfalls and Fallacies: Targeting A Bleeding-Edge ProcessCarlos SaavedraPas encore d'évaluation
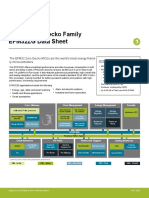
- EFM32 Zero Gecko Family EFM32ZG Data SheetDocument104 pagesEFM32 Zero Gecko Family EFM32ZG Data SheetHans ClarinPas encore d'évaluation
- PT2313L PDFDocument3 pagesPT2313L PDFMaugrys Castillo100% (1)
- EST-P1 User GuideDocument58 pagesEST-P1 User GuideNinaPas encore d'évaluation
- RRUS 8843 B2 B66A Data SheetDocument5 pagesRRUS 8843 B2 B66A Data SheetFARHAD SADIQ100% (3)
- LG Flatron w1642c Chassis Lm73bDocument25 pagesLG Flatron w1642c Chassis Lm73bRonan NolascoPas encore d'évaluation
- New Microsoft Word DocumentDocument22 pagesNew Microsoft Word Documentrishi_2009joshiPas encore d'évaluation
- WF520 Technical SpecificationDocument12 pagesWF520 Technical SpecificationWilmer Huaman PasaperaPas encore d'évaluation
- Parameter Extraction Procedure For A Physics-Based Power Sic Schottky Diode ModelDocument11 pagesParameter Extraction Procedure For A Physics-Based Power Sic Schottky Diode ModelKrishna KumarPas encore d'évaluation
- High Ratio Vertical PCB Mount Current TransformersDocument1 pageHigh Ratio Vertical PCB Mount Current TransformersAmritpal SinghPas encore d'évaluation
- Grid Tied Multilevel Inverter Power Quality MonitoringDocument5 pagesGrid Tied Multilevel Inverter Power Quality MonitoringMuhammad Sohaib ShahidPas encore d'évaluation
- Research Bookbind Upd 6Document41 pagesResearch Bookbind Upd 6MattJimuelQuililanPas encore d'évaluation
- PA-POS-2OC3 Two-Port Packet-over-SONET Port Adapter Installation and ConfigurationDocument100 pagesPA-POS-2OC3 Two-Port Packet-over-SONET Port Adapter Installation and ConfigurationOscar Suazo SantosPas encore d'évaluation
- Keyes Nrf905 RF TransceiverDocument4 pagesKeyes Nrf905 RF TransceiverLucaDelbarba100% (1)
- Median Frequency - MATLAB MedfreqDocument10 pagesMedian Frequency - MATLAB MedfreqRadh KamalPas encore d'évaluation
- 289206183 SID 409 B型 英文技术说明书 V1 42Document78 pages289206183 SID 409 B型 英文技术说明书 V1 42jayapalPas encore d'évaluation
- Led TV: User ManualDocument2 pagesLed TV: User ManualShahid AliPas encore d'évaluation
- Mobile PhoneDocument22 pagesMobile PhoneelisiaPas encore d'évaluation
- Lm331 Voltaje A FrecuenciaDocument24 pagesLm331 Voltaje A FrecuenciaLeguel LPas encore d'évaluation
- Fts 2007Document7 pagesFts 2007andhracollegesPas encore d'évaluation
- Chapter 5-Multimedia Playback SystemsDocument33 pagesChapter 5-Multimedia Playback Systemshubillanth0% (2)
- Opentherm Protocol v2-2Document35 pagesOpentherm Protocol v2-2Daniel Martín PratsPas encore d'évaluation