Vous aimerez peut-être aussi
- Parametros Del Variador de Media Tension PDFDocument144 pagesParametros Del Variador de Media Tension PDFSantiagoAlejandroZúñigaTrellesPas encore d'évaluation
- Partes Principales de Una Instalación EléctricaDocument9 pagesPartes Principales de Una Instalación EléctricaOmar SalcedoPas encore d'évaluation
- Conexión Delta Abierto en Transformadores de PotenciaDocument11 pagesConexión Delta Abierto en Transformadores de Potenciajajaja57% (7)
- N3 24847224 Consolidado PDFDocument73 pagesN3 24847224 Consolidado PDFroiderPas encore d'évaluation
- Tarea 11 - Programacion Basica de Microcontroladores PLC-2Document26 pagesTarea 11 - Programacion Basica de Microcontroladores PLC-2Samuel D Los Rios100% (1)
- Practica 1 - PuertaDocument10 pagesPractica 1 - PuertaJonathan GtzPas encore d'évaluation
- Modulación de FRECUENCIADocument8 pagesModulación de FRECUENCIAStefany LamedaPas encore d'évaluation
- Manual de Prac FPE 2008Document23 pagesManual de Prac FPE 2008margaritaPas encore d'évaluation
- Webcache Googleusercontent Com Search Q Cache SC1nUTvD5lgJ RDocument338 pagesWebcache Googleusercontent Com Search Q Cache SC1nUTvD5lgJ RDavidZarcoPas encore d'évaluation
- Cuaderno Informativo Sobre Radiaciones No IonizantesDocument52 pagesCuaderno Informativo Sobre Radiaciones No IonizantesAntonio Jose Serna100% (1)
- Guia Ley de CoulombDocument2 pagesGuia Ley de CoulombAlexandra Benedetti67% (6)
- 45Document54 pages45Carlos Eduardo Cacho CorreaPas encore d'évaluation
- Elt3631 Silabo 2-2020Document7 pagesElt3631 Silabo 2-2020Miiiki LopezPas encore d'évaluation
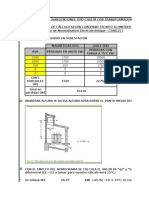
- Calculo de Ventilacion en Se Caseta (Aceite)Document21 pagesCalculo de Ventilacion en Se Caseta (Aceite)williamPas encore d'évaluation
- Curso de Ensayos No Destructivos - UcvDocument77 pagesCurso de Ensayos No Destructivos - UcvAndy Alvarez BorjaPas encore d'évaluation
- Subestaciones D1Document3 pagesSubestaciones D1markitoPas encore d'évaluation
- Amplificador de 20w X 12 Salidas A ParlantesDocument16 pagesAmplificador de 20w X 12 Salidas A ParlantesNottinhand ForestPas encore d'évaluation
- FÍSICADocument53 pagesFÍSICAJuan Lindo LapaPas encore d'évaluation
- Riesgos de Ignición Electrostática en GasolinerasDocument17 pagesRiesgos de Ignición Electrostática en GasolinerasJose Alvarez100% (1)
- Lab03 Grupo04 PDFDocument10 pagesLab03 Grupo04 PDFManuel MarquezPas encore d'évaluation
- Desbloquea Tu Mente - Módulo 2Document19 pagesDesbloquea Tu Mente - Módulo 2orminsul0% (1)
- Central Térmica HumayDocument29 pagesCentral Térmica Humayトナカイ メイコルPas encore d'évaluation
- Lineas Trifasicas Circuito ParaleloDocument4 pagesLineas Trifasicas Circuito ParaleloDavid Montachana75% (4)
- Proyecto ElectromecanicaDocument46 pagesProyecto ElectromecanicaAlan VeraPas encore d'évaluation
- Articulo de KarlaDocument7 pagesArticulo de KarlaEddie Nahúm ArmendárizPas encore d'évaluation
- Partículas MagnéticasDocument7 pagesPartículas Magnéticasmessi llamas100% (1)
- Punto Focal Lab6.PF2Document10 pagesPunto Focal Lab6.PF2Natty FiallosPas encore d'évaluation
- Presentación de Materiales Aislantes y MeggerDocument52 pagesPresentación de Materiales Aislantes y MeggerJuan David MontoyaPas encore d'évaluation
- Informe Visita PaulDocument4 pagesInforme Visita PaulJavier BallesterosPas encore d'évaluation
- UNIMET Tableros y Proteccin en MTDocument85 pagesUNIMET Tableros y Proteccin en MTrasanchez5100% (2)