Vous aimerez peut-être aussi
- Self Biased High Performance Folded Cascode Cmos OpampDocument6 pagesSelf Biased High Performance Folded Cascode Cmos OpampArvind MishraPas encore d'évaluation
- Systemc-Ams Tutorial: Institute of Computer Technology Vienna University of Technology Markus DammDocument26 pagesSystemc-Ams Tutorial: Institute of Computer Technology Vienna University of Technology Markus DammAamir HabibPas encore d'évaluation
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionD'EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionPas encore d'évaluation
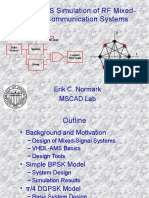
- Eric Thesis SlidesDocument43 pagesEric Thesis SlidesHumberto JuniorPas encore d'évaluation
- Real Time Operating System A Complete Guide - 2020 EditionD'EverandReal Time Operating System A Complete Guide - 2020 EditionPas encore d'évaluation
- Lecture23 dr3Document37 pagesLecture23 dr3api-3834272Pas encore d'évaluation
- Lecture5 PartitionspectralDocument14 pagesLecture5 Partitionspectralapi-3834272Pas encore d'évaluation
- Lecture1 IntroDocument35 pagesLecture1 Introapi-3834272Pas encore d'évaluation
- DDA & BRESENHAMS, Circle (Mid Point Approch)Document36 pagesDDA & BRESENHAMS, Circle (Mid Point Approch)varunmundalePas encore d'évaluation
- Cmos ReportDocument25 pagesCmos ReportNaveen KumarPas encore d'évaluation
- 6-A Prediction ProblemDocument31 pages6-A Prediction ProblemPrabhjot KhuranaPas encore d'évaluation
- Lecture22 dr2Document37 pagesLecture22 dr2api-3834272Pas encore d'évaluation
- DLD GTU Question Bank: Chapter-1 Binary SystemDocument5 pagesDLD GTU Question Bank: Chapter-1 Binary Systemnirav34Pas encore d'évaluation
- Lecture 3 Single Stage AmplifiersDocument76 pagesLecture 3 Single Stage Amplifierstranhieu_hcmutPas encore d'évaluation
- Gaussian Random Number Generator Using Boxmuller MethodDocument27 pagesGaussian Random Number Generator Using Boxmuller MethodAbhijeet Singh KatiyarPas encore d'évaluation
- Lecture21 dr1Document31 pagesLecture21 dr1api-3834272Pas encore d'évaluation
- ADPLL Design and Implementation On FPGADocument6 pagesADPLL Design and Implementation On FPGANavathej BangariPas encore d'évaluation
- Memory DesignDocument66 pagesMemory Designshashank varshneyPas encore d'évaluation
- Verilog Imp...Document105 pagesVerilog Imp...Arun JyothiPas encore d'évaluation
- MATRIX CHAIN MultiplicationDocument41 pagesMATRIX CHAIN Multiplicationsam bordgePas encore d'évaluation
- Solid State Device Modeling 1Document199 pagesSolid State Device Modeling 1DarwinPas encore d'évaluation
- Amec Unit 2 QBDocument23 pagesAmec Unit 2 QBashreen akbar aliPas encore d'évaluation
- Lecture17 RoutingDocument51 pagesLecture17 Routingapi-3834272Pas encore d'évaluation
- HSPICE Toolbox For Matlab and Octave (Also For Use With Ngspice)Document5 pagesHSPICE Toolbox For Matlab and Octave (Also For Use With Ngspice)Wala SaadehPas encore d'évaluation
- Dijsktra ThesisDocument65 pagesDijsktra ThesisGupta AakashPas encore d'évaluation
- Model Connectivity RAK PresentationDocument31 pagesModel Connectivity RAK PresentationHien HaPas encore d'évaluation
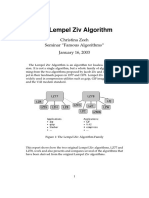
- Lemp El Ziv ReportDocument17 pagesLemp El Ziv ReportJohn Lester Cruz EstarezPas encore d'évaluation
- MMIC Processing Techniques and Design ConsiderationsDocument23 pagesMMIC Processing Techniques and Design ConsiderationsVishal IyerPas encore d'évaluation
- Advanced DSPDocument2 pagesAdvanced DSPAshar Wahid Hashmi50% (2)
- CJ MCQDocument98 pagesCJ MCQMOHAMED SHAFEEPas encore d'évaluation
- Ee 215 ADocument8 pagesEe 215 AArjun Singhal100% (1)
- Cmos LayoutDocument13 pagesCmos LayoutshastryPas encore d'évaluation
- Pass Transistor LogicDocument36 pagesPass Transistor LogicMuneza NaeemPas encore d'évaluation
- Designing Memory Array Subsystems CH 12 PDFDocument87 pagesDesigning Memory Array Subsystems CH 12 PDFrao rehPas encore d'évaluation
- CMOS Design RulesDocument21 pagesCMOS Design Rulesrakheep123Pas encore d'évaluation
- Actuarial Mathematics - Newton L. Bowers JR., Et - Al. (2nd Edition) PDFDocument138 pagesActuarial Mathematics - Newton L. Bowers JR., Et - Al. (2nd Edition) PDFCarmela Buncio50% (2)
- Lecture18 GRDocument36 pagesLecture18 GRapi-3834272Pas encore d'évaluation
- Machine LearningDocument7 pagesMachine LearningAbinaya87Pas encore d'évaluation
- Solutions To Problems From Essentials of Electronic TestingDocument215 pagesSolutions To Problems From Essentials of Electronic TestingPradeep Chandra82% (28)
- Cmos Two Stage OpamppublishedDocument5 pagesCmos Two Stage Opamppublisheddeepak pandeyPas encore d'évaluation
- DSA LIVE FOR WORKING PROFESSIONALSDocument8 pagesDSA LIVE FOR WORKING PROFESSIONALSJOSHITHAPas encore d'évaluation
- Top Down Modeling of Pipeline ADC VerificationDocument54 pagesTop Down Modeling of Pipeline ADC Verificationhariprasad12345Pas encore d'évaluation
- Vlsi Physical Design Automation: Theory and PracticeDocument15 pagesVlsi Physical Design Automation: Theory and PracticeMilind SharmaPas encore d'évaluation
- Digital Image ProcessingDocument4 pagesDigital Image ProcessingSedu Madavan100% (3)
- gpdk090 PDK ReferencemanualDocument31 pagesgpdk090 PDK ReferencemanualAshish JoshiPas encore d'évaluation
- Design of 12-Bit DAC Using CMOS TechnologyDocument5 pagesDesign of 12-Bit DAC Using CMOS TechnologysanthoshPas encore d'évaluation
- 2023 02 Ansys General Hardware RecommendationsDocument24 pages2023 02 Ansys General Hardware RecommendationsDayvid Melo BrittoPas encore d'évaluation
- STLD Important TopicsDocument1 pageSTLD Important TopicsAdari G V Chiranjeevi ACOE100% (2)
- Question Bank Fundamentals of CMOS VLSI-10EC56 15-16Document10 pagesQuestion Bank Fundamentals of CMOS VLSI-10EC56 15-16Pranav KpPas encore d'évaluation
- Lab 591 - B Analysis and Design of CSDocument2 pagesLab 591 - B Analysis and Design of CSDevine WriterPas encore d'évaluation
- Logical Effort Designing Fast Cmos CircuitsDocument17 pagesLogical Effort Designing Fast Cmos CircuitsNishant MittalPas encore d'évaluation
- Recommendations For Port Setup When Using ADS Momentum and Modelithics ModelsDocument7 pagesRecommendations For Port Setup When Using ADS Momentum and Modelithics ModelsContePas encore d'évaluation
- DSP Matlab ProgramsDocument50 pagesDSP Matlab ProgramsDhiraj Thakur67% (3)
- CMOS Translinear CellsDocument4 pagesCMOS Translinear CellsSumitChoudharyPas encore d'évaluation
- Ec8562 DSP ManualDocument86 pagesEc8562 DSP ManualN.S.Priyanga 33Pas encore d'évaluation
- Design, Fabrication and Testing of Analog IC AmplifiersDocument17 pagesDesign, Fabrication and Testing of Analog IC AmplifiersNurul Hanim HashimPas encore d'évaluation
- ch3 PDFDocument20 pagesch3 PDFJaskirat SinghPas encore d'évaluation
- Systems of Linear EquationsDocument14 pagesSystems of Linear Equationsahmad.nawazPas encore d'évaluation
- IEEE Paper FormatDocument3 pagesIEEE Paper FormatSanhith RaoPas encore d'évaluation
- OSI and TCP/IP Networking Models ExplainedDocument25 pagesOSI and TCP/IP Networking Models ExplainedTimothyAmadoPas encore d'évaluation
- 3141E Hall Sensor SwitchDocument9 pages3141E Hall Sensor SwitchbarbosiPas encore d'évaluation
- Chapter 2Document2 pagesChapter 2TimothyAmadoPas encore d'évaluation
- Math and Physics Practice QuestionsDocument3 pagesMath and Physics Practice QuestionsMark Anthony SantosPas encore d'évaluation
- Inverse of a 3x3 Matrix RequirementsDocument1 pageInverse of a 3x3 Matrix RequirementsTimothyAmadoPas encore d'évaluation
- Chapter 1Document2 pagesChapter 1TimothyAmadoPas encore d'évaluation
- Bsece 3d (Cover Page)Document1 pageBsece 3d (Cover Page)TimothyAmadoPas encore d'évaluation
- Flood HistoryDocument3 pagesFlood HistoryTimothyAmadoPas encore d'évaluation
- Tutorial 1Document1 pageTutorial 1TimothyAmadoPas encore d'évaluation
- Voltage Divider LayoutDocument1 pageVoltage Divider LayoutTimothyAmadoPas encore d'évaluation
- t42p MM Non Epi-ParamsDocument6 pagest42p MM Non Epi-ParamsTimothyAmadoPas encore d'évaluation
- The Crimson Vylet FiveDocument120 pagesThe Crimson Vylet FiveTimothyAmadoPas encore d'évaluation
- B A Judson 1: Not Drawn AccuratelyDocument5 pagesB A Judson 1: Not Drawn AccuratelyAnonymous GNWnQac0% (1)
- Golden Ratio - The Divine Ratio - Design StructureDocument63 pagesGolden Ratio - The Divine Ratio - Design StructureJohannes Tinctoris86% (7)
- Shape Formulas For Area (A) and Circumference (C) : A BH X Base X Height A LW Length X WidthDocument16 pagesShape Formulas For Area (A) and Circumference (C) : A BH X Base X Height A LW Length X WidthDominic G. Casinto100% (1)
- Means of Positive Linear OperatorsDocument20 pagesMeans of Positive Linear Operatorsusyoussef ufsPas encore d'évaluation
- MODULE 6 ApportionmentDocument13 pagesMODULE 6 Apportionment3 dots . . .Pas encore d'évaluation
- Edward Huntington - A Set of Postulates For Abstract Geometry, Expressed in Terms of The Simple Relation of InclusionDocument38 pagesEdward Huntington - A Set of Postulates For Abstract Geometry, Expressed in Terms of The Simple Relation of Inclusionforeigner_2103Pas encore d'évaluation
- 4.synthesis of Driving Point Functions (One Port Systems)Document51 pages4.synthesis of Driving Point Functions (One Port Systems)BerentoPas encore d'évaluation
- Practice Week 3 - ExcelDocument10 pagesPractice Week 3 - ExcelPham Nhat HaPas encore d'évaluation
- Nicholas A. Rossi: ObjectiveDocument1 pageNicholas A. Rossi: Objectivenrossi147Pas encore d'évaluation
- Inventory Theory (Quantitative Techniques)Document41 pagesInventory Theory (Quantitative Techniques)Lexter Smith Albay100% (2)
- Studyplan SSC CGL Maths QuantDocument17 pagesStudyplan SSC CGL Maths Quantkoolnash8784Pas encore d'évaluation
- March Test Grade 9 PDFDocument2 pagesMarch Test Grade 9 PDFMano BaroudyPas encore d'évaluation
- L13 Modelling - Relationships QDocument39 pagesL13 Modelling - Relationships Qnur aleesha izzatiPas encore d'évaluation
- DPP 3 Maths PDFDocument2 pagesDPP 3 Maths PDFswetank tripathiPas encore d'évaluation
- MATH 6 Lesson PlanDocument23 pagesMATH 6 Lesson PlanOtenciano MautganonPas encore d'évaluation
- ANalytic GeometryDocument112 pagesANalytic Geometryanon ggPas encore d'évaluation
- Wittgenstein, Ludwig - Lectures On PhilosophyDocument42 pagesWittgenstein, Ludwig - Lectures On PhilosophymPas encore d'évaluation
- 2a Notes Permutations CombinationsDocument12 pages2a Notes Permutations CombinationsRajPas encore d'évaluation
- Calculus of VariationsDocument30 pagesCalculus of Variationsrahpooye313Pas encore d'évaluation
- CS2 CMP Upgrade 2022Document128 pagesCS2 CMP Upgrade 2022ChahelPas encore d'évaluation
- Mat1003 Discrete-Mathematical-Structures TH 3.0 6 Mat1003 Discrete-Mathematical-Structures TH 3.0 6 Mat 1003 Discrete Mathematical StructuresDocument2 pagesMat1003 Discrete-Mathematical-Structures TH 3.0 6 Mat1003 Discrete-Mathematical-Structures TH 3.0 6 Mat 1003 Discrete Mathematical Structuresbalajichevuri8Pas encore d'évaluation
- Vatsal Sharan's Contact and Education DetailsDocument2 pagesVatsal Sharan's Contact and Education DetailsPrakhar PawechaPas encore d'évaluation
- Internal Assignment: Name Sneha SankhlaDocument4 pagesInternal Assignment: Name Sneha SankhlaSneha SankhlaPas encore d'évaluation
- Advantages of TuitionDocument8 pagesAdvantages of TuitionToni Lee0% (1)
- Anna University Engineering Mathematics I exam questionsDocument2 pagesAnna University Engineering Mathematics I exam questionsArvind SriramPas encore d'évaluation
- St. Andrew Christian Academy Curriculum Map for Grade 9 MathematicsDocument14 pagesSt. Andrew Christian Academy Curriculum Map for Grade 9 MathematicsRoby PadillaPas encore d'évaluation
- How We Say Numbers and Symbols in EnglishDocument7 pagesHow We Say Numbers and Symbols in EnglishTim CooperPas encore d'évaluation
- Lec 01-Recursive DefinitionsDocument19 pagesLec 01-Recursive DefinitionsAhmadPas encore d'évaluation
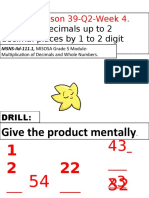
- COT-PowerPoint - COT 2-MATHEMATICS GRADE 5Document48 pagesCOT-PowerPoint - COT 2-MATHEMATICS GRADE 5Minerva Ocampo100% (1)
- Modul 11: Matriks: (Bam) Modul Matematik SPMDocument2 pagesModul 11: Matriks: (Bam) Modul Matematik SPMbalkisPas encore d'évaluation
- Calculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusD'EverandCalculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsD'EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsÉvaluation : 5 sur 5 étoiles5/5 (2)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenD'EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenPas encore d'évaluation
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeD'EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeÉvaluation : 4 sur 5 étoiles4/5 (2)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingD'EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingÉvaluation : 4.5 sur 5 étoiles4.5/5 (21)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormD'EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormÉvaluation : 5 sur 5 étoiles5/5 (5)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)D'EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Pas encore d'évaluation
- Psychology Behind Mathematics - The Comprehensive GuideD'EverandPsychology Behind Mathematics - The Comprehensive GuidePas encore d'évaluation
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathD'EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathÉvaluation : 5 sur 5 étoiles5/5 (1)
- Mental Math Secrets - How To Be a Human CalculatorD'EverandMental Math Secrets - How To Be a Human CalculatorÉvaluation : 5 sur 5 étoiles5/5 (3)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldD'EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldÉvaluation : 3 sur 5 étoiles3/5 (79)
- The Long Hangover: Putin's New Russia and the Ghosts of the PastD'EverandThe Long Hangover: Putin's New Russia and the Ghosts of the PastÉvaluation : 4.5 sur 5 étoiles4.5/5 (76)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsD'EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsÉvaluation : 3.5 sur 5 étoiles3.5/5 (9)
- Math Magic: How To Master Everyday Math ProblemsD'EverandMath Magic: How To Master Everyday Math ProblemsÉvaluation : 3.5 sur 5 étoiles3.5/5 (15)
- Limitless Mind: Learn, Lead, and Live Without BarriersD'EverandLimitless Mind: Learn, Lead, and Live Without BarriersÉvaluation : 4 sur 5 étoiles4/5 (6)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.D'EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Évaluation : 5 sur 5 étoiles5/5 (1)
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceD'EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidencePas encore d'évaluation