Vous aimerez peut-être aussi
- Livro U1Document53 pagesLivro U1Wender Silva0% (1)
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoD'EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoPas encore d'évaluation
- Manutenção em Válvula de ControleDocument19 pagesManutenção em Válvula de ControlePedro Garcia M. JúniorPas encore d'évaluation
- Manutenção de torno mecânicoDocument5 pagesManutenção de torno mecânicoVinicios Muller AlvesPas encore d'évaluation
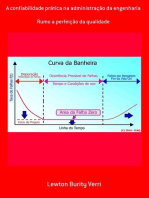
- A Confiabilidade Prática Na Administração Da EngenhariaD'EverandA Confiabilidade Prática Na Administração Da EngenhariaPas encore d'évaluation
- Diagnóstico de Falhas e Alarmes em Sistemas Supervisórios e CLPsDocument16 pagesDiagnóstico de Falhas e Alarmes em Sistemas Supervisórios e CLPsLeonardo Cruz100% (1)
- ApostilaDocument167 pagesApostilaLeo Tanus100% (1)
- Produtividade E Eficiência Profissional: Estratégias Para O Sucesso No TrabalhoD'EverandProdutividade E Eficiência Profissional: Estratégias Para O Sucesso No TrabalhoPas encore d'évaluation
- vazaoDocument357 pagesvazaoorea1Pas encore d'évaluation
- Diagnóstico de falhas em sistemas de automaçãoDocument14 pagesDiagnóstico de falhas em sistemas de automaçãoLuiz Santos ResendePas encore d'évaluation
- Desenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoD'EverandDesenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoPas encore d'évaluation
- Análise de óleos usados: testes e interpretaçãoDocument40 pagesAnálise de óleos usados: testes e interpretaçãoRodrigo PereiraPas encore d'évaluation
- Encar. de Montagem PDFDocument63 pagesEncar. de Montagem PDFMisael PessanhaPas encore d'évaluation
- Análise de vibrações em máquinas e equipamentos para manutenção preditivaDocument104 pagesAnálise de vibrações em máquinas e equipamentos para manutenção preditivaGabriel PissolattoPas encore d'évaluation
- Curso de Vibrações PetrobrasDocument42 pagesCurso de Vibrações PetrobrasJean França AquinoPas encore d'évaluation
- Sistemas sequenciais pneumáticosDocument10 pagesSistemas sequenciais pneumáticosFabio YamamotoPas encore d'évaluation
- Análise de vibração para manutenção preditiva em equipamentos rotativosDocument127 pagesAnálise de vibração para manutenção preditiva em equipamentos rotativosEverton Freitas de OliveiraPas encore d'évaluation
- Automacao de Grandes Maquinas - MarioCesarCamposDocument9 pagesAutomacao de Grandes Maquinas - MarioCesarCamposarthur_2011Pas encore d'évaluation
- A evolução da manutençãoDocument154 pagesA evolução da manutençãoDiegoCarvalhoPas encore d'évaluation
- Medidores de NívelDocument72 pagesMedidores de Níveleugeniaabreu100% (1)
- Calibração de transmissores de pressãoDocument13 pagesCalibração de transmissores de pressãoDaniel CavalcantePas encore d'évaluation
- Balanceamento Metodo Tres Pontos 10005387Document52 pagesBalanceamento Metodo Tres Pontos 10005387marciofelipessantosPas encore d'évaluation
- Exercicios de ManutencaoDocument21 pagesExercicios de Manutencaofilipercastro2736Pas encore d'évaluation
- Slides Instrumentacao VazaoDocument30 pagesSlides Instrumentacao VazaoGetúlio RibeiroPas encore d'évaluation
- Apostila - ISA BA 27 Setembro 2021Document209 pagesApostila - ISA BA 27 Setembro 2021Raphael AndradePas encore d'évaluation
- ML-1020-1 A4 R1Document85 pagesML-1020-1 A4 R1fcruzx0% (1)
- Senai - Instrumentos e Dispositivos de Controle de CaldeirasDocument45 pagesSenai - Instrumentos e Dispositivos de Controle de CaldeirasWagner BrancoPas encore d'évaluation
- Análise de falhas em componentes: etapas e estudos de casoDocument69 pagesAnálise de falhas em componentes: etapas e estudos de casoser_emec100% (1)
- Curso Petrobras Slides InstrumentacaoDocument154 pagesCurso Petrobras Slides InstrumentacaoJuarez Alves AntunesPas encore d'évaluation
- ValvulaDocument267 pagesValvulaUenes CAPas encore d'évaluation
- Apostila Instrumentação e ControleDocument180 pagesApostila Instrumentação e ControleTiago FariaPas encore d'évaluation
- TESTE DE VALVULAS Avaliação Da Degradação de Desempenho de VálvulasDocument18 pagesTESTE DE VALVULAS Avaliação Da Degradação de Desempenho de VálvulasGuilherme Pereira100% (1)
- WEG Motores Eletricos Guia de Especificacao 50032749 Brochure Portuguese Web PDFDocument68 pagesWEG Motores Eletricos Guia de Especificacao 50032749 Brochure Portuguese Web PDFAntonioPas encore d'évaluation
- Análise de Componentes Principais Aplicada À Confiabilidade de Sistemas Complexos.Document138 pagesAnálise de Componentes Principais Aplicada À Confiabilidade de Sistemas Complexos.JahSongPas encore d'évaluation
- Sistemas de admissão e escapamento de motores convencionais e a jatoDocument77 pagesSistemas de admissão e escapamento de motores convencionais e a jatocristianocfs100% (1)
- Medidor de vazão turbina manual instruções MTG MTLDocument13 pagesMedidor de vazão turbina manual instruções MTG MTLGuilherme B. BatistaPas encore d'évaluation
- Profmec Mmec Mlub Preditiva ApostilaDocument53 pagesProfmec Mmec Mlub Preditiva ApostilaprofmecPas encore d'évaluation
- Compressor Anel Líquido FuncionamentoDocument7 pagesCompressor Anel Líquido FuncionamentoDavi MarquesPas encore d'évaluation
- TCC - DifusorxMoenda PDFDocument67 pagesTCC - DifusorxMoenda PDFRodrigo MachadoPas encore d'évaluation
- Bombas: tipos e funcionamentoDocument30 pagesBombas: tipos e funcionamentoVitor100% (1)
- Apostila Acionamentos Hidráulicos e PneumáticosDocument172 pagesApostila Acionamentos Hidráulicos e PneumáticosHedgar TobiasPas encore d'évaluation
- Alinhador de Eixos A Laser TKSA 20 Da SKFDocument2 pagesAlinhador de Eixos A Laser TKSA 20 Da SKFCarlos LaoPas encore d'évaluation
- Fundamentos da Análise de Óleos LubrificantesDocument36 pagesFundamentos da Análise de Óleos LubrificantesElias Sauer Ferreira PereiraPas encore d'évaluation
- Compressor EsDocument29 pagesCompressor EsAndré GuilhermePas encore d'évaluation
- Programação de CLPs: dicas e técnicas avançadasDocument24 pagesProgramação de CLPs: dicas e técnicas avançadasThiago AraujoPas encore d'évaluation
- Análise de falhas em máquinas: causas e ferramentasDocument16 pagesAnálise de falhas em máquinas: causas e ferramentasHeli CarlosPas encore d'évaluation
- Apostila Conceitos Sobre FieldbusDocument54 pagesApostila Conceitos Sobre FieldbusValdy NascimentoPas encore d'évaluation
- Instrumentação e AutomaçãoDocument57 pagesInstrumentação e Automaçãowalter fonsecaPas encore d'évaluation
- Análise de Falhas - RolamentosDocument30 pagesAnálise de Falhas - RolamentosGabriele MedeirosPas encore d'évaluation
- Bomba de Fusos Notos®Document8 pagesBomba de Fusos Notos®Bruno CoutoPas encore d'évaluation
- Teoria de Sistemas Amostrados e Controle DigitalDocument70 pagesTeoria de Sistemas Amostrados e Controle DigitalcleitonmoyaPas encore d'évaluation
- COMISSIONAMENTO DE INSTRUMENTAÇÃO E AUTOMAÇÃO EM PROJETOS OFFSHORE E ONSHOREDocument96 pagesCOMISSIONAMENTO DE INSTRUMENTAÇÃO E AUTOMAÇÃO EM PROJETOS OFFSHORE E ONSHORETiago RibeiroPas encore d'évaluation
- (Apostila) (Subestação) 1Document98 pages(Apostila) (Subestação) 1LUCAS FreitasPas encore d'évaluation
- Manual de Instalação APEDocument25 pagesManual de Instalação APEThiago H F MargonarPas encore d'évaluation
- Comissionamento Geradores Síncronos - Venialgo PDFDocument84 pagesComissionamento Geradores Síncronos - Venialgo PDFodenir_rodPas encore d'évaluation
- Tutorial Teste Rele Schneider P545 Religamento CTCDocument46 pagesTutorial Teste Rele Schneider P545 Religamento CTCdfrc01Pas encore d'évaluation
- Sistema de Automacao Monitoramento e Con PDFDocument55 pagesSistema de Automacao Monitoramento e Con PDFLuiz ResendePas encore d'évaluation
- 3 - 1 - LaplaceDocument28 pages3 - 1 - LaplaceAndré HenriquePas encore d'évaluation
- Sistema de Automacao Monitoramento e Con PDFDocument55 pagesSistema de Automacao Monitoramento e Con PDFLuiz ResendePas encore d'évaluation
- A Industria 4.0 No BrasilDocument65 pagesA Industria 4.0 No BrasilMatheus Jerônimo100% (3)
- 2308 6421 1 PBDocument18 pages2308 6421 1 PBkazumaPas encore d'évaluation
- Validacao Rele de ProtecaoDocument114 pagesValidacao Rele de ProtecaoJose Alberto RodriguezPas encore d'évaluation
- Universidade Tecnologica Federal Do para PDFDocument75 pagesUniversidade Tecnologica Federal Do para PDFLuiz ResendePas encore d'évaluation
- Universidade Tecnologica Federal Do para PDFDocument75 pagesUniversidade Tecnologica Federal Do para PDFLuiz ResendePas encore d'évaluation
- Edital de Seleção Mestrado CPGEI UTFPR 2020Document6 pagesEdital de Seleção Mestrado CPGEI UTFPR 2020Luiz ResendePas encore d'évaluation
- Manual de Motores ElétricosDocument61 pagesManual de Motores Elétricostpcvix100% (2)
- 02 - Bwi Guia Procobre Iec 60364 8 1 Eficiencia Instalacoes Eletricas Mar19Document30 pages02 - Bwi Guia Procobre Iec 60364 8 1 Eficiencia Instalacoes Eletricas Mar19ELIEZERFURTADO08Pas encore d'évaluation
- P&IDocument15 pagesP&IEliane AlvesPas encore d'évaluation
- 2010 GabrielCamposCarneiro PDFDocument110 pages2010 GabrielCamposCarneiro PDFCarolina AntunesPas encore d'évaluation
- 3 - 1 - SimbologiaDocument127 pages3 - 1 - SimbologiaScarlett CaribéPas encore d'évaluation
- Coleçã de Artes FolhaDocument1 pageColeçã de Artes FolhaLuiz ResendePas encore d'évaluation
- 10 - 1 - Lab 5 - Sistemas de 1 e 2 Ordem PDFDocument18 pages10 - 1 - Lab 5 - Sistemas de 1 e 2 Ordem PDFLuiz ResendePas encore d'évaluation
- BalançasDocument1 pageBalançasLuiz ResendePas encore d'évaluation
- Cartão AO CLP LINDEDocument4 pagesCartão AO CLP LINDELuiz ResendePas encore d'évaluation
- 15 - Controle de Nivel em CaldeirasDocument18 pages15 - Controle de Nivel em CaldeirasWelliton Nazaré FreitasPas encore d'évaluation
- 1 - 2 - Malha Aberta e FechadaDocument20 pages1 - 2 - Malha Aberta e FechadaWanderley Terci EstevesPas encore d'évaluation
- Chave de fluxo Thermal SP-200/210 para controle de vazão e fluxo de líquidosDocument2 pagesChave de fluxo Thermal SP-200/210 para controle de vazão e fluxo de líquidosLuiz ResendePas encore d'évaluation
- 24 Bienal de São Paulo - Arte Cont. Brasileira 1998Document232 pages24 Bienal de São Paulo - Arte Cont. Brasileira 1998Luiz Resende100% (1)
- Roberval BulgarelliDocument149 pagesRoberval BulgarelliJodiel CoelhoPas encore d'évaluation
- Roberval BulgarelliDocument149 pagesRoberval BulgarelliJodiel CoelhoPas encore d'évaluation
- Areas ClassificadasDocument39 pagesAreas ClassificadasTojocarlos100% (2)
- A Garota Da BandaDocument6 pagesA Garota Da BandaLuiz ResendePas encore d'évaluation
- 25 Bienal de São Paulo - Países 2002Document292 pages25 Bienal de São Paulo - Países 2002Luiz ResendePas encore d'évaluation
- Dissertação Paulo Brito Versão Final VFDocument92 pagesDissertação Paulo Brito Versão Final VFLuiz ResendePas encore d'évaluation
- Programador Delphi SêniorDocument3 pagesProgramador Delphi SêniorDaniel Mirrai100% (1)
- Vidro EstrturalDocument8 pagesVidro Estrturalmjc1980Pas encore d'évaluation
- Manual Pro Shop Abril 2014Document28 pagesManual Pro Shop Abril 2014ArqErickSeraficoPas encore d'évaluation
- Manual Reabilitação Profissional Nov 2011Document83 pagesManual Reabilitação Profissional Nov 2011Lilian Fonseca100% (1)
- Questões econômicas da República VelhaDocument8 pagesQuestões econômicas da República VelhaRmb90Pas encore d'évaluation
- 19 Curiosidades Sobre o GoogleDocument7 pages19 Curiosidades Sobre o GooglePereiraPas encore d'évaluation
- Integrativo 3 - Proposta de Temas para DefessaDocument1 pageIntegrativo 3 - Proposta de Temas para DefessaVander XhornPas encore d'évaluation
- SlidesDocument24 pagesSlidesFernando KaioPas encore d'évaluation
- Bauman e Drummond sobre sociedade de consumidoresDocument12 pagesBauman e Drummond sobre sociedade de consumidoresDionatanFrançaRodriguesPas encore d'évaluation
- Dissertacao MariaJoaoOliveiraDocument75 pagesDissertacao MariaJoaoOliveiraMalvar91Pas encore d'évaluation
- Leilao 440403 30Document67 pagesLeilao 440403 30Folha de pagamento macaeprevPas encore d'évaluation
- A cidade ilegal e a falta de alternativasDocument15 pagesA cidade ilegal e a falta de alternativasAilton Pinto Alves FilhoPas encore d'évaluation
- Direito Administrativo Angolano: Normas de Procedimento e Atividade AdministrativaDocument18 pagesDireito Administrativo Angolano: Normas de Procedimento e Atividade Administrativaaercio_manuelPas encore d'évaluation
- N3210001 Fornecimento Energia Eletrica Tensao Secundaria 1Document120 pagesN3210001 Fornecimento Energia Eletrica Tensao Secundaria 1Bernardo Juvenil Celso Jr.Pas encore d'évaluation
- Funções em Dados - Training - Microsoft LearnDocument4 pagesFunções em Dados - Training - Microsoft LearnLucas GonçalvesPas encore d'évaluation
- Código para jogos digitaisDocument3 pagesCódigo para jogos digitaisMARIA ADELIA ICO DOS SANTOSPas encore d'évaluation
- Auditoria ambiental em refinarias de petróleoDocument9 pagesAuditoria ambiental em refinarias de petróleolarissaPas encore d'évaluation
- Montagem de EstruturasDocument42 pagesMontagem de EstruturasVitim Ferreira100% (2)
- Takaoka MicrotakDocument51 pagesTakaoka MicrotakEng. Edelson Martins100% (1)
- Aula 2Document2 pagesAula 2Salete EisenPas encore d'évaluation
- Componentes do motor e configurações multicilíndricasDocument19 pagesComponentes do motor e configurações multicilíndricasthallesnetPas encore d'évaluation
- Estrutura de Atendimento Hospital Anchieta - Grupo KoraDocument7 pagesEstrutura de Atendimento Hospital Anchieta - Grupo KoraRenata RezendePas encore d'évaluation
- Pré-instalação de Raio-X e DRDocument10 pagesPré-instalação de Raio-X e DRRafael BorbaPas encore d'évaluation
- Direito Tributário e Comercial em Concurso PúblicoDocument40 pagesDireito Tributário e Comercial em Concurso PúblicoraphajonesPas encore d'évaluation
- Manual de Instruções Tricalc - AndaimesDocument232 pagesManual de Instruções Tricalc - AndaimesJackson Baia AlvesPas encore d'évaluation
- 05 Projeto Basico de Cultivo Hidroponico PDFDocument4 pages05 Projeto Basico de Cultivo Hidroponico PDFGiovane Vaz100% (3)
- Editais de convocação para assembleias de consórcios e federações municipais no RNDocument700 pagesEditais de convocação para assembleias de consórcios e federações municipais no RNJohn αPas encore d'évaluation
- Manual Operacional APAC V 1 1Document23 pagesManual Operacional APAC V 1 1Igor PitangaPas encore d'évaluation
- EHealth No Brasil - Status Atual e Tendências FuturasDocument6 pagesEHealth No Brasil - Status Atual e Tendências FuturasXiico MariaPas encore d'évaluation
- Do 100+Dicas+Fatais+de+CIVIL-desbloqueadoDocument27 pagesDo 100+Dicas+Fatais+de+CIVIL-desbloqueadoLayanePas encore d'évaluation