Vous aimerez peut-être aussi
- Transmissor Com Ba1404 e 2sc2458Document8 pagesTransmissor Com Ba1404 e 2sc2458carrlosalbertodossantossilvaPas encore d'évaluation
- PCC BiocelDocument3 pagesPCC Biocelallisonassun10Pas encore d'évaluation
- Iracema - Adaptação Teatral (José de Alencar)Document5 pagesIracema - Adaptação Teatral (José de Alencar)Zeca RolandPas encore d'évaluation
- Uchôa & Ramos (Ed) - Memórias Do ExilioDocument335 pagesUchôa & Ramos (Ed) - Memórias Do ExilioArturioramaPas encore d'évaluation
- Líder, Como Motivar e Engajar Seus LideradosDocument19 pagesLíder, Como Motivar e Engajar Seus LideradosFranks Lennon Figueiredo RibeiroPas encore d'évaluation
- As Microcervejarias No Brasil Atual - Eduardo MarcussoDocument171 pagesAs Microcervejarias No Brasil Atual - Eduardo MarcussoodairnettoPas encore d'évaluation
- Fichamento: MARTELOTTA. M, E. (Org.) - Manual de Linguística. São Paulo: Contexto, 2009, p.177 - 192Document2 pagesFichamento: MARTELOTTA. M, E. (Org.) - Manual de Linguística. São Paulo: Contexto, 2009, p.177 - 192Jason FelipePas encore d'évaluation
- 6P PDFDocument9 pages6P PDFChristian RafaelPas encore d'évaluation
- Historia e Geografia de GoiasDocument103 pagesHistoria e Geografia de GoiasMichel Merelles100% (2)
- BAUBEROT, Jean. A Favor de Uma Sociologia Intercultural e Histórica Da LaicidadeDocument20 pagesBAUBEROT, Jean. A Favor de Uma Sociologia Intercultural e Histórica Da LaicidadePaulimDPas encore d'évaluation
- TORNO CNC CABEÇOTE MÓVEL - Tipo CDocument2 pagesTORNO CNC CABEÇOTE MÓVEL - Tipo CBruno AlmeidaPas encore d'évaluation
- FISPQ AMB-C-16 #Atul003Document3 pagesFISPQ AMB-C-16 #Atul003CONFIARE PINTURAS E JATEAMENTOPas encore d'évaluation
- Apostila de Desenho Geométrico 1 - IfALDocument36 pagesApostila de Desenho Geométrico 1 - IfALLuis OmenaPas encore d'évaluation
- Teorias BehavioristasDocument12 pagesTeorias BehavioristasCornélio Eugénio MarquelePas encore d'évaluation
- Dezembro LaranjaDocument7 pagesDezembro LaranjaLetíciaPas encore d'évaluation
- Provas Da Criacao Ex NihiloDocument6 pagesProvas Da Criacao Ex NihiloromualdomonteiroPas encore d'évaluation
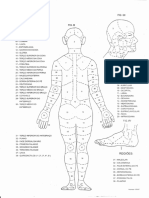
- Topografia Corpo HumanoDocument2 pagesTopografia Corpo Humanoestevaocanan100% (9)
- A Tragédia Grega Na Poética SlidesDocument26 pagesA Tragédia Grega Na Poética SlidesRafael CensonPas encore d'évaluation
- Epilepsia Na Infancia e AdolescenciaDocument502 pagesEpilepsia Na Infancia e AdolescenciaLeoberto Batista Pereira Sobrinho100% (1)
- Azia, Má Digestão, Esofagite Ou GastriteDocument2 pagesAzia, Má Digestão, Esofagite Ou GastriteGbarielle BarrosPas encore d'évaluation
- FolderDocument2 pagesFoldertirsi mabelPas encore d'évaluation
- 9888 18845 1 PBDocument6 pages9888 18845 1 PBDausten VitorPas encore d'évaluation
- 170 Motivos para Te Amar PituxinhoooDocument4 pages170 Motivos para Te Amar PituxinhoooSilvia Aros100% (1)
- 10 Projeto Aurora CenPRADocument56 pages10 Projeto Aurora CenPRAdamqueirozPas encore d'évaluation
- 73 78Document6 pages73 78Thiago AguiarPas encore d'évaluation
- Bingo CientirinhasDocument10 pagesBingo CientirinhasCARLOS FALCASSA100% (2)
- A Industrialização Brasileira Após Anos 90 Até A ContemporaneidadeDocument2 pagesA Industrialização Brasileira Após Anos 90 Até A ContemporaneidadeJúllia Fagundes AmaralPas encore d'évaluation
- 3-RenascimentoCultural e CientificoDocument21 pages3-RenascimentoCultural e CientificoPaulo AndradePas encore d'évaluation
- Montando Um Descarregador de CapacitoresDocument4 pagesMontando Um Descarregador de CapacitoresriofelizPas encore d'évaluation
- O Guardador de Rebanhos IiDocument2 pagesO Guardador de Rebanhos IiAna PaivaPas encore d'évaluation