Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Advanced Math 1 Principles and Sample ProblemsDocument5 pagesAdvanced Math 1 Principles and Sample ProblemsKrisha Jean MacalinoPas encore d'évaluation
- Finite Difference EquationawdawDocument19 pagesFinite Difference EquationawdawAchmad Rachmad TullahPas encore d'évaluation
- Current, Tidal, and Mini-Hydro in Rivers: Very Highly Efficient Compared With Conventional OnesDocument3 pagesCurrent, Tidal, and Mini-Hydro in Rivers: Very Highly Efficient Compared With Conventional OnesAchmad Rachmad TullahPas encore d'évaluation
- Fortification of The Muslim-Hisnulmuslim-English PDFDocument140 pagesFortification of The Muslim-Hisnulmuslim-English PDFAchmad Rachmad TullahPas encore d'évaluation
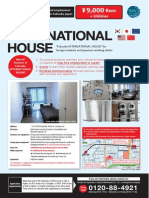
- Fukuoka Ih Flyer e Outline1Document1 pageFukuoka Ih Flyer e Outline1Achmad Rachmad TullahPas encore d'évaluation
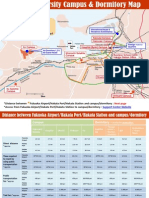
- Kaizuka Campus: International House & Residence (Kashiihama)Document2 pagesKaizuka Campus: International House & Residence (Kashiihama)Achmad Rachmad TullahPas encore d'évaluation
- N (RPM)Document11 pagesN (RPM)Achmad Rachmad TullahPas encore d'évaluation
- R4vm3u 1262114633182Document2 pagesR4vm3u 1262114633182Achmad Rachmad TullahPas encore d'évaluation
- NK Emt Practical PDFDocument38 pagesNK Emt Practical PDFshubh soniPas encore d'évaluation
- Cities of Words - Recent Studies On Urbanism and Literature PDFDocument19 pagesCities of Words - Recent Studies On Urbanism and Literature PDFibsenbymPas encore d'évaluation
- Differential Geometry of CurvesDocument21 pagesDifferential Geometry of CurvesBhavnaPas encore d'évaluation
- MAE331Lecture8 PDFDocument24 pagesMAE331Lecture8 PDFPranav BhardwajPas encore d'évaluation
- P2 Chp12 VectorsDocument18 pagesP2 Chp12 VectorsAshwin LingamPas encore d'évaluation
- Surface Areas and Volumes ProblemsDocument2 pagesSurface Areas and Volumes ProblemssmeenaPas encore d'évaluation
- Mod 7Document7 pagesMod 7S M AkashPas encore d'évaluation
- Centers of TrianglesDocument2 pagesCenters of Trianglesapi-486483470Pas encore d'évaluation
- 300+ Top Surveying Lab Viva Questions and Answers: Loading..Document4 pages300+ Top Surveying Lab Viva Questions and Answers: Loading..sarre mamoudouPas encore d'évaluation
- 4MA0 1F Que 20140110Document20 pages4MA0 1F Que 20140110Lalith77Pas encore d'évaluation
- TEST I. Multiple Choice: Victoriana Peling Tagbe National High SchoolDocument2 pagesTEST I. Multiple Choice: Victoriana Peling Tagbe National High SchoolJessa Banawan Edulan100% (2)
- On Binary Structure of Supra Topological SpaceDocument14 pagesOn Binary Structure of Supra Topological Spaceفرات الطائيPas encore d'évaluation
- Unit 6 TRANSFORMATIONS FINAL PLANDocument27 pagesUnit 6 TRANSFORMATIONS FINAL PLANerdawati nurdinPas encore d'évaluation
- Similarity and DissimilarityDocument34 pagesSimilarity and DissimilarityAllison CollierPas encore d'évaluation
- Republic of The Philippines: Set - ADocument8 pagesRepublic of The Philippines: Set - AAnthony Jay PoraquePas encore d'évaluation
- Dimensionally Extended Nine-Intersection Model (DE-9IM)Document8 pagesDimensionally Extended Nine-Intersection Model (DE-9IM)George MastersonPas encore d'évaluation
- Important Mathematical Formulas: TrigonometryDocument3 pagesImportant Mathematical Formulas: TrigonometryAjit JenaPas encore d'évaluation
- Syllabus For The Philippine Licensure ExaminationDocument8 pagesSyllabus For The Philippine Licensure ExaminationMaryknoll DauzPas encore d'évaluation
- Essential Trig Reference SheetDocument2 pagesEssential Trig Reference SheetAndy Alan LuongPas encore d'évaluation
- Final Exam - Calculus - PhysicsDocument27 pagesFinal Exam - Calculus - Physicsarvie montemayorPas encore d'évaluation
- Glossary of Art Terms and First Few LessonsDocument80 pagesGlossary of Art Terms and First Few LessonsVeraaryans83% (6)
- IsometricDocument3 pagesIsometrickumar0% (1)
- Great Mathematics Books of The Twentieth CenturyDocument35 pagesGreat Mathematics Books of The Twentieth CenturyronnyPas encore d'évaluation
- Mathematics 1b SaqsDocument29 pagesMathematics 1b Saqssai darlingPas encore d'évaluation
- Pre-K Scope and Sequence PDFDocument9 pagesPre-K Scope and Sequence PDFXiaoPas encore d'évaluation
- PythagorasDocument16 pagesPythagorasGiridharanPas encore d'évaluation
- Sectional Results: Sofistik 2020Document28 pagesSectional Results: Sofistik 2020ec05226Pas encore d'évaluation
- Analytical GeometryDocument20 pagesAnalytical GeometryIan Bondoc100% (1)
- Soil Prediction With R PDFDocument370 pagesSoil Prediction With R PDFwalterdryPas encore d'évaluation