Vous aimerez peut-être aussi
- Aula 6Document25 pagesAula 6Azt RibPas encore d'évaluation
- Cinematica de Corpos Rigidos Parte IDocument20 pagesCinematica de Corpos Rigidos Parte Ipaulacristina.conteudistaPas encore d'évaluation
- Cinemática de RotaçãoDocument9 pagesCinemática de RotaçãoSidney BernardoPas encore d'évaluation
- Cinemtica Do Movimento Plano de Um Corpo RgidoDocument39 pagesCinemtica Do Movimento Plano de Um Corpo RgidoMARCOS PAULO RODRIGUES PRONUNCIATEPas encore d'évaluation
- 4.1-Cinematica Do SolidoDocument58 pages4.1-Cinematica Do SolidoEduardo BittencourtPas encore d'évaluation
- 20 08 18 DinâmicaDocument59 pages20 08 18 DinâmicaADRIANOPas encore d'évaluation
- DINAMICADocument14 pagesDINAMICAJeferson Manenti AcorciPas encore d'évaluation
- RESUMO FISICA CamilaDocument4 pagesRESUMO FISICA CamilaCamila Santos Lima BrandaoPas encore d'évaluation
- Dinamica Do Corpo RigidoDocument5 pagesDinamica Do Corpo RigidoAlberto Jaime JaimePas encore d'évaluation
- Trabalho de FísicaDocument5 pagesTrabalho de FísicaMatheus PaivaPas encore d'évaluation
- Movimento CircularDocument17 pagesMovimento CircularVictor Morad100% (1)
- Dinamica e Cinematica de Corpo Rigido (Edmilson Loully Nms - Msunilurio)Document24 pagesDinamica e Cinematica de Corpo Rigido (Edmilson Loully Nms - Msunilurio)Edmilson Loully NmsPas encore d'évaluation
- 9a Aula Síncrona RotaçoesDocument52 pages9a Aula Síncrona RotaçoesAureo CarvalhoPas encore d'évaluation
- Aula 05 - Vibrações - Rotação Corpo RigidoDocument29 pagesAula 05 - Vibrações - Rotação Corpo RigidoRicardo PereiraPas encore d'évaluation
- 03 09 18 DinâmicaDocument89 pages03 09 18 DinâmicaADRIANOPas encore d'évaluation
- 09 09 18 DinâmicaDocument100 pages09 09 18 DinâmicaADRIANOPas encore d'évaluation
- FGLEGI 2023 2024 Slides06 CorpoRigidoDocument38 pagesFGLEGI 2023 2024 Slides06 CorpoRigidojoel freire alvesPas encore d'évaluation
- dINAMICA DA ROTAÇAODocument16 pagesdINAMICA DA ROTAÇAOrafael_rap_8105100% (4)
- Aula Teórica 04 22.23 Cinemática Da Rotação em Torno de Eixo FixoDocument3 pagesAula Teórica 04 22.23 Cinemática Da Rotação em Torno de Eixo FixoZé engenheiroPas encore d'évaluation
- Cinematica - TopicosDocument24 pagesCinematica - TopicosAugusto CastroPas encore d'évaluation
- Rotação Com Eixo FixoDocument5 pagesRotação Com Eixo FixoPaulopsyPas encore d'évaluation
- Aula de Mecaninica Rudney TorqueDocument36 pagesAula de Mecaninica Rudney TorqueDREZZYOFCPas encore d'évaluation
- Cinemética Dos Corpos RígidosDocument34 pagesCinemética Dos Corpos RígidosandreflsoaresPas encore d'évaluation
- Momento AngularDocument4 pagesMomento AngularCleyton FariaPas encore d'évaluation
- Movimento Circular UniformeDocument18 pagesMovimento Circular Uniformeedson belitoPas encore d'évaluation
- Movimento Retilíneo UniformeDocument7 pagesMovimento Retilíneo UniformeRafael AraujoPas encore d'évaluation
- 4-Referencial TeóricoDocument2 pages4-Referencial TeóricoLuisFernandoArcenoPas encore d'évaluation
- Apostila de Movimento Circular - IDocument17 pagesApostila de Movimento Circular - IrareisPas encore d'évaluation
- Rotacao Do Momento AngularDocument7 pagesRotacao Do Momento Angularfrancisco2mixPas encore d'évaluation
- Capitulos 10 e 11 1Document21 pagesCapitulos 10 e 11 1Matheus LopesPas encore d'évaluation
- Cinemática VetorialDocument8 pagesCinemática VetorialduardoplPas encore d'évaluation
- Fisica 1.2Document39 pagesFisica 1.2jennyphercarneiroPas encore d'évaluation
- Movimento CurvilíneoDocument8 pagesMovimento CurvilíneoAllison RafaelPas encore d'évaluation
- Mecânica 11 1T 1Document10 pagesMecânica 11 1T 1CastroPas encore d'évaluation
- Avaliação 1Document8 pagesAvaliação 1rayssawanderley759Pas encore d'évaluation
- Relatório Física RotaçõesDocument10 pagesRelatório Física RotaçõesWallaf Costa VimercatiPas encore d'évaluation
- Dinâmica Dos Corpos RígidosDocument53 pagesDinâmica Dos Corpos RígidosEduardo de Castro GodoyPas encore d'évaluation
- APNP - Tema 2 - Cinemática - Movimento Curvilíneo - Componentes Retangulares e Movimento de ProjéteisDocument35 pagesAPNP - Tema 2 - Cinemática - Movimento Curvilíneo - Componentes Retangulares e Movimento de ProjéteisRODRIGO FURQUIM GHIRALDIPas encore d'évaluation
- Aula03Movimento Circular UniformeCBM22122021Document5 pagesAula03Movimento Circular UniformeCBM22122021Sandro MendesPas encore d'évaluation
- Ua 2Document37 pagesUa 2Francielli MoratelliPas encore d'évaluation
- 1 Aula - 20 - Setembro - Tempo, Trajetória e Posição. Movimentos Retilíneos e Gráficos Posição-TempoDocument21 pages1 Aula - 20 - Setembro - Tempo, Trajetória e Posição. Movimentos Retilíneos e Gráficos Posição-TempoGabriel VitalPas encore d'évaluation
- 12ano F 1 1 1 Posicao Equacoes Parametricas Do Movimento e Trajetoria - PPSXDocument13 pages12ano F 1 1 1 Posicao Equacoes Parametricas Do Movimento e Trajetoria - PPSXmiguellopes77Pas encore d'évaluation
- 4 Translação e Rotação Corpo RígidoDocument19 pages4 Translação e Rotação Corpo RígidoLucas GodoyPas encore d'évaluation
- Grandezas Angulares: Movimento CircularDocument8 pagesGrandezas Angulares: Movimento CircularCollin SimbinePas encore d'évaluation
- Fisico QuimicaDocument17 pagesFisico QuimicamalexandrefernandesPas encore d'évaluation
- Resumo FísicaDocument11 pagesResumo Físicajoaquim.123.silva.987Pas encore d'évaluation
- Cinematica AngularDocument16 pagesCinematica Angularandersonxp60Pas encore d'évaluation
- Coordenadas Cilíndricas e PolaresDocument24 pagesCoordenadas Cilíndricas e PolaresRODRIGO FURQUIM GHIRALDIPas encore d'évaluation
- 2 Movimento Retilineo e CircularDocument41 pages2 Movimento Retilineo e CircularMarina MarinhoPas encore d'évaluation
- Física #4Document15 pagesFísica #4malluca031Pas encore d'évaluation
- Movimento OndulatorioDocument21 pagesMovimento OndulatorioLennon SilvaPas encore d'évaluation
- Ae rf11 d1s1 1 2 VelocidadeDocument20 pagesAe rf11 d1s1 1 2 VelocidadeLucia DuartePas encore d'évaluation
- Tempo, Posição e VelocidadeDocument5 pagesTempo, Posição e VelocidadeMiriam FilipaPas encore d'évaluation
- Dinamica Das Rotacoes FISICADocument14 pagesDinamica Das Rotacoes FISICASteffanyePas encore d'évaluation
- Exercícios de Física Nível Médio PDFDocument16 pagesExercícios de Física Nível Médio PDFGabriel DelfimPas encore d'évaluation
- Simetria Molecular III: Série Didática para o apoio a formação de professores de QuímicaD'EverandSimetria Molecular III: Série Didática para o apoio a formação de professores de QuímicaPas encore d'évaluation
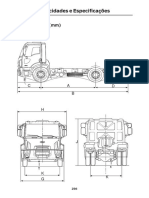
- Dimensões FordDocument1 pageDimensões FordAlexandre AmorimPas encore d'évaluation
- Relation PISDocument1 pageRelation PISAlexandre AmorimPas encore d'évaluation
- Assembly Instruction MX-2, MXS, MXS-RDocument1 pageAssembly Instruction MX-2, MXS, MXS-RAlexandre AmorimPas encore d'évaluation
- Prova 39 - Técnico de Manutenção Júnior MecânicaDocument13 pagesProva 39 - Técnico de Manutenção Júnior MecânicaMarcio CollyerPas encore d'évaluation
- Tka 25.700 4H3MDocument1 pageTka 25.700 4H3MAlexandre AmorimPas encore d'évaluation
- Amostra Petrobras Eng Equipamentos JR Mecanica Selecao de MateriaisDocument3 pagesAmostra Petrobras Eng Equipamentos JR Mecanica Selecao de MateriaisAlexandre AmorimPas encore d'évaluation
- Apostila GuindautoDocument25 pagesApostila Guindautomichaelfabricia92% (24)
- Mec2 Texto Cap5Document54 pagesMec2 Texto Cap5Rafaella B. C. RafaPas encore d'évaluation
- Sistema Hidráulico de Um GuindautoDocument9 pagesSistema Hidráulico de Um GuindautoAlexandre AmorimPas encore d'évaluation
- Modelo TCCDocument10 pagesModelo TCCRenato Nery DominguesPas encore d'évaluation
- Fonte para Parafusadeira SkilDocument11 pagesFonte para Parafusadeira SkilAlexandre AmorimPas encore d'évaluation
- Lista de Exercicios Eng Mec 2015 2Document2 pagesLista de Exercicios Eng Mec 2015 2Alexandre AmorimPas encore d'évaluation
- Trabalho Sobre ManutençãoDocument2 pagesTrabalho Sobre ManutençãoAlexandre AmorimPas encore d'évaluation
- Log ECF TestDocument18 pagesLog ECF TestAlexandre AmorimPas encore d'évaluation
- Ponte Golden GateDocument27 pagesPonte Golden GateAlexandre AmorimPas encore d'évaluation
- Perda de Carga LocalizadaDocument14 pagesPerda de Carga LocalizadaAlexandre AmorimPas encore d'évaluation
- Aula 01Document37 pagesAula 01Alexandre AmorimPas encore d'évaluation
- 2 PBDocument25 pages2 PBJorge Gomes Pereira JúiorPas encore d'évaluation
- Aula 01Document37 pagesAula 01Alexandre AmorimPas encore d'évaluation
- Exercício InstalaçõesDocument4 pagesExercício InstalaçõesAlexandre AmorimPas encore d'évaluation
- Calculo IIIDocument1 pageCalculo IIIAlexandre AmorimPas encore d'évaluation
- CálculoII (TRABALHO)Document26 pagesCálculoII (TRABALHO)Paulo Silva DjiPas encore d'évaluation
- Aulas de Ondas, Otica e Eletromagnetismo PDFDocument32 pagesAulas de Ondas, Otica e Eletromagnetismo PDFAlexandre AmorimPas encore d'évaluation
- Eletroestática PDFDocument2 pagesEletroestática PDFAlexandre AmorimPas encore d'évaluation
- Tratamento - Continuação Fossa SépticaDocument14 pagesTratamento - Continuação Fossa SépticaAlexandre AmorimPas encore d'évaluation
- ReferenciasDocument2 pagesReferenciasAlexandre AmorimPas encore d'évaluation
- AnexoCorreioMensagem 535005 Funcoes PDFDocument91 pagesAnexoCorreioMensagem 535005 Funcoes PDFAlexandre AmorimPas encore d'évaluation
- Trabalho de Recuperação Bimestral de Física: (Digite Texto)Document3 pagesTrabalho de Recuperação Bimestral de Física: (Digite Texto)Alexandre AmorimPas encore d'évaluation
- Relatorio - Estudo de ColisõesDocument19 pagesRelatorio - Estudo de ColisõesFutebol Clube CalangasPas encore d'évaluation
- Dalton Eletricidade 11Document21 pagesDalton Eletricidade 11Romulo DuartePas encore d'évaluation
- O Equilíbrio Do Corpo Extenso É Um Conceito Fundamental Na FísicaDocument6 pagesO Equilíbrio Do Corpo Extenso É Um Conceito Fundamental Na Física4qpmskxx7zPas encore d'évaluation
- Trabalho 1 MotoresDocument20 pagesTrabalho 1 Motoresclarice oliveraPas encore d'évaluation
- Processos ConstrutivosDocument6 pagesProcessos ConstrutivosAnaPas encore d'évaluation
- Eletromagnetismo 161013155311Document50 pagesEletromagnetismo 161013155311Ermerson Ney Leite RodriguesPas encore d'évaluation
- F Sica LEIS DE KIRCHHOFF Rodrigo 220919 232649Document3 pagesF Sica LEIS DE KIRCHHOFF Rodrigo 220919 232649André OliveiraPas encore d'évaluation
- Física - A DinâmicaDocument8 pagesFísica - A DinâmicaTeo SilvaPas encore d'évaluation
- Servo MotoresDocument12 pagesServo Motoreseric976100% (1)
- Interac Oes Magn EticasDocument48 pagesInterac Oes Magn EticasPaula NogueiraPas encore d'évaluation
- Fórmulas TermodinamicaDocument3 pagesFórmulas TermodinamicaFelipe Pagano50% (2)
- Relatorio 03 de Fisica ExperimentalDocument5 pagesRelatorio 03 de Fisica ExperimentalMaria AlicePas encore d'évaluation
- Escoamento Variável Sob PressãoDocument8 pagesEscoamento Variável Sob PressãoLuís MonteiroPas encore d'évaluation
- SEBENTA - FISICA - Compressed PDFDocument76 pagesSEBENTA - FISICA - Compressed PDFPedro Rafael Afonso Afonso100% (1)
- CT Aula1Document70 pagesCT Aula1Bruno AvellarPas encore d'évaluation
- Movimento em Queda LivreDocument13 pagesMovimento em Queda LivreLeandroBritoPas encore d'évaluation
- Força, Pressaõ Perda de Carga.Document10 pagesForça, Pressaõ Perda de Carga.Eduardo VieiraPas encore d'évaluation
- 1 Ano Pet 3 Semana 1Document2 pages1 Ano Pet 3 Semana 1GnastyPas encore d'évaluation
- As Equações Mais Utilizadas em Mecânica Dos FluidosDocument13 pagesAs Equações Mais Utilizadas em Mecânica Dos FluidosGabriel MPas encore d'évaluation
- CALORIMETRIADocument9 pagesCALORIMETRIAElisandro RafaelPas encore d'évaluation
- Cap. 1 - Carga ElétricaDocument46 pagesCap. 1 - Carga ElétricaAndré GomesPas encore d'évaluation
- Prova 2 - Movimento 2D e 3DDocument1 pageProva 2 - Movimento 2D e 3DAna Karoline CardosoPas encore d'évaluation
- Calculo Estrutural Linha de VidaDocument6 pagesCalculo Estrutural Linha de VidaDaniel SimiãoPas encore d'évaluation
- Física II - Aula 9Document30 pagesFísica II - Aula 9Edcarlos Antonio0% (1)
- Dissertação VIMDocument103 pagesDissertação VIMMonique KrupinskiPas encore d'évaluation
- Relatório - Ressalto HidráulicoDocument15 pagesRelatório - Ressalto HidráulicoMateusFlorêncioPas encore d'évaluation
- Light and Optics N5 2024 I RemovedDocument45 pagesLight and Optics N5 2024 I Removedjessicafotos1607Pas encore d'évaluation
- Relatório 4 - Coeficiente de DescargaDocument17 pagesRelatório 4 - Coeficiente de DescargaJéssica VielPas encore d'évaluation
- Lançamento VerticalDocument1 pageLançamento VerticalLeonardo LimaPas encore d'évaluation