Vous aimerez peut-être aussi
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- The 8051 Microcontroller and Embedded Systems: Motor Control: Relay, PWM, DC and Stepper MotorsDocument51 pagesThe 8051 Microcontroller and Embedded Systems: Motor Control: Relay, PWM, DC and Stepper MotorsAmAnDeepSingh100% (1)
- Induction Motor Drive Using Thyristor Based Cycloconverter For Variable Torque Load ApplicationDocument5 pagesInduction Motor Drive Using Thyristor Based Cycloconverter For Variable Torque Load ApplicationIJIRST100% (2)
- H-Bridge: 4.1 DefinitionDocument11 pagesH-Bridge: 4.1 DefinitionJunaid Iftikhar100% (1)
- PIC+l293d DocumentDocument5 pagesPIC+l293d Documentmadduanil100% (1)
- Microstepping TutorialDocument5 pagesMicrostepping TutorialDave Chan100% (1)
- Bidirectional Current Source-TIDocument9 pagesBidirectional Current Source-TIestraj1954100% (1)
- Silicon Controlled RectifierDocument9 pagesSilicon Controlled RectifierFarishat Nusabbee An Nafs100% (1)
- IndusDocument7 pagesIndusTristan Cabatac100% (1)
- Arduino TMP36 Precision Temperature Sensor-GuideDocument1 pageArduino TMP36 Precision Temperature Sensor-GuideMC. Rene Solis R.100% (1)
- Default Switch/Jumper SettingsDocument16 pagesDefault Switch/Jumper SettingsRafael Avella100% (1)
- Gems Pressure Transducer PDFDocument5 pagesGems Pressure Transducer PDFFelix Alex de Vera100% (1)
- Plecs Tl431Document11 pagesPlecs Tl431khsniper100% (1)
- M XrutytDocument12 pagesM XrutytDistribuidorIBoolPedregalDeSantoDomingo100% (1)
- IrsolwibDocument4 pagesIrsolwibleko17100% (2)
- Vestel LCD Power Supply 17PW20Document1 pageVestel LCD Power Supply 17PW20Amadou Fall100% (1)
- g1 PDFDocument1 pageg1 PDFLourdes Gianella Navas Nuñez100% (1)
- Sound Sensor Module PDFDocument5 pagesSound Sensor Module PDFTrần Thảo Nguyên100% (1)
- LCD 2 X 8Document4 pagesLCD 2 X 8dek_war100% (1)
- HC Sr04Document4 pagesHC Sr04Shofol Biswas100% (1)
- Brushless DC Electric Motor Control by CPLDDocument6 pagesBrushless DC Electric Motor Control by CPLDIonela100% (3)
- Oasis Technologies PVT - LTD: ReturnDocument5 pagesOasis Technologies PVT - LTD: Returnrpsirius1100% (1)
- Port PDFDocument16 pagesPort PDFdharanika100% (1)
- Chapter 4 PIC IO ProgrammingDocument28 pagesChapter 4 PIC IO ProgrammingAndy Wo100% (1)
- Uart (Universal Asynchronous Receiver Transmitter) ProtocolDocument3 pagesUart (Universal Asynchronous Receiver Transmitter) Protocolshilpa8a8s100% (1)
- LCD 4 Bit InterfacingDocument6 pagesLCD 4 Bit InterfacingYogesh Hardiya100% (1)
- StopWatch CDocument6 pagesStopWatch CInderJeet Gehlot100% (1)
- 17pw17 2Document1 page17pw17 2korodiferenc9258100% (1)
- HC SR04 PDFDocument3 pagesHC SR04 PDFVipan Sharma100% (1)
- Pressure Trasducers ArkerDocument26 pagesPressure Trasducers ArkerVictor Hugo Benitez Paez100% (1)
- Power KSC-570Document1 pagePower KSC-570Lucie Pavlíčková100% (1)
- XL MaxSonar WR - Datasheet PDFDocument26 pagesXL MaxSonar WR - Datasheet PDFfernandoviolante8551100% (1)
- Arduino Wifi Shield Schematic - 2 PDFDocument1 pageArduino Wifi Shield Schematic - 2 PDFHich Em100% (1)
- L296 SchematicDocument1 pageL296 SchematicmyEbooks100% (1)
- RS 232Document1 pageRS 232Aneela Pathan100% (1)
- 5 2 X 16 Parallel LCD: 3.5.1 Technical SpecificationsDocument3 pages5 2 X 16 Parallel LCD: 3.5.1 Technical SpecificationsManish Singh100% (1)
- Lab LCDDocument6 pagesLab LCDJesus Cotrina100% (1)
- Reg1 LM1117IMPX-3.3: Title: RF ReplacementDocument1 pageReg1 LM1117IMPX-3.3: Title: RF ReplacementMário João Vicente100% (1)
- Probador rj45Document1 pageProbador rj45Manuel Rivas100% (2)
- Mains Slave TriacDocument2 pagesMains Slave Triacdewasuryanto100% (3)
- 5V3AUPSR2 SchematicDocument1 page5V3AUPSR2 SchematicAkhil A B100% (1)
- MecanumTb66212 - 副本Document1 pageMecanumTb66212 - 副本pyae soan aung100% (1)
- ATMEGA Fuse DoctorDocument1 pageATMEGA Fuse DoctorAdrianMartinezMendez100% (1)
- PS2® To Usb Mouse Translator Hardware DiagramDocument10 pagesPS2® To Usb Mouse Translator Hardware Diagramjhenriqueh100% (1)
- Complete Gas Sensor CircuitDocument9 pagesComplete Gas Sensor Circuitsethuraghul100% (1)
- MicrocontrollersDocument14 pagesMicrocontrollersanshu4u06100% (1)
- Read Modify WriteDocument2 pagesRead Modify WriteMisbah UrRehman100% (1)
- ML12 SchematicDocument1 pageML12 SchematicDon Bosse100% (1)
- 17pw16 1Document1 page17pw16 1korodiferenc9258100% (1)
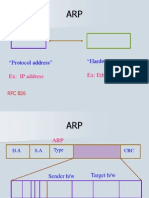
- Details of ARP and PPPDocument40 pagesDetails of ARP and PPPYogesh Palkar100% (1)
- GDM2004D LCD SpecsheetDocument9 pagesGDM2004D LCD SpecsheetNico Bellic100% (2)
- Uart Spi I2cDocument17 pagesUart Spi I2cestraj1954100% (1)
- USB To RS232 Using Atmel ATtiny2313 or ATmega8Document4 pagesUSB To RS232 Using Atmel ATtiny2313 or ATmega8Nugraha Indrawan100% (2)
- ms1022 gp22 EquivalentDocument60 pagesms1022 gp22 Equivalentdbm100% (1)
- 2012-MS0EE095 - PaperDocument5 pages2012-MS0EE095 - PaperTalha MehmoodPas encore d'évaluation
- Implementation of A Single-Phase Unipolar Inverter Using DSP TMS320F241Document5 pagesImplementation of A Single-Phase Unipolar Inverter Using DSP TMS320F241Pci ElectronicaPas encore d'évaluation
- Drives Semi-FinalDocument24 pagesDrives Semi-FinalProsper K. PhiriPas encore d'évaluation
- An Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterDocument5 pagesAn Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterArghya MukherjeePas encore d'évaluation
- Copper Controlled DC Drive DenuDocument8 pagesCopper Controlled DC Drive DenuDenuka PathiranaPas encore d'évaluation
- Speed Control of Induction MotorDocument33 pagesSpeed Control of Induction MotorMaham NaeemPas encore d'évaluation
- Application Form: KarachiDocument1 pageApplication Form: KarachiEngrAneelKumarAkhaniPas encore d'évaluation
- Construction & Project Management ServicesDocument2 pagesConstruction & Project Management ServicesEngrAneelKumarAkhaniPas encore d'évaluation
- Check List For Excavation/ Pile Drilling: TP1000/OES/SEC/CW0001Document18 pagesCheck List For Excavation/ Pile Drilling: TP1000/OES/SEC/CW0001EngrAneelKumarAkhaniPas encore d'évaluation
- Energy For Education: Bringing Reliable Energy Where Its Needed Most: SchoolsDocument4 pagesEnergy For Education: Bringing Reliable Energy Where Its Needed Most: SchoolsEngrAneelKumarAkhaniPas encore d'évaluation
- TP 6Document45 pagesTP 6EngrAneelKumarAkhaniPas encore d'évaluation
- PV PDFDocument237 pagesPV PDFfaizPas encore d'évaluation
- Science Talent Farming Scheme: Undergraduate Programme-HEC (Batch I)Document1 pageScience Talent Farming Scheme: Undergraduate Programme-HEC (Batch I)EngrAneelKumarAkhaniPas encore d'évaluation
- Application For Employment: Enter Agency Name I.E, City of Fort Worth, Texas Address City, State, Zip PhoneDocument4 pagesApplication For Employment: Enter Agency Name I.E, City of Fort Worth, Texas Address City, State, Zip PhoneEngrAneelKumarAkhaniPas encore d'évaluation
- 212labexp06 NitrationOfToluene RDocument3 pages212labexp06 NitrationOfToluene REngrAneelKumarAkhaniPas encore d'évaluation
- S. No R. No Name: Federal Public Service Commission Aga Khan Road, F-5/1 Press NoteDocument24 pagesS. No R. No Name: Federal Public Service Commission Aga Khan Road, F-5/1 Press NoteEngrAneelKumarAkhaniPas encore d'évaluation
- Electric Illumination McqsDocument48 pagesElectric Illumination McqsEngrAneelKumarAkhani36% (14)
- Types of Asexual ReproductionDocument19 pagesTypes of Asexual ReproductionEngrAneelKumarAkhaniPas encore d'évaluation
- Electric Traction McqsDocument27 pagesElectric Traction McqsEngrAneelKumarAkhani100% (1)
- Electric Current and Ohm McqsDocument77 pagesElectric Current and Ohm McqsEngrAneelKumarAkhani100% (2)
- Provisional Consolidated List of Class Attendance Institute of Information & Communication Technology (Iict)Document2 pagesProvisional Consolidated List of Class Attendance Institute of Information & Communication Technology (Iict)EngrAneelKumarAkhaniPas encore d'évaluation
- Circuit Breakers McqsDocument56 pagesCircuit Breakers McqsEngrAneelKumarAkhani79% (14)
- Clint Inverter PaperDocument13 pagesClint Inverter PaperEngrAneelKumarAkhaniPas encore d'évaluation
- Economics of Power Generation McqsDocument74 pagesEconomics of Power Generation McqsEngrAneelKumarAkhaniPas encore d'évaluation
- Thevenin & Superposition TheoremsDocument3 pagesThevenin & Superposition TheoremsEngrAneelKumarAkhaniPas encore d'évaluation
- HNBR Material TestDocument16 pagesHNBR Material TestskyerfreePas encore d'évaluation
- Sistema de Refrigeração de Óleo, EspecificaçõesDocument2 pagesSistema de Refrigeração de Óleo, EspecificaçõesAlexandrePas encore d'évaluation
- Tesp12205pi R1Document36 pagesTesp12205pi R1arabsniperPas encore d'évaluation
- Connecting Piping Design in AutoCAD Plant 3D To Piping Fabrication Through Spoolgen-Ian Matthew-AU2018Document12 pagesConnecting Piping Design in AutoCAD Plant 3D To Piping Fabrication Through Spoolgen-Ian Matthew-AU2018Gabriel DezoutterPas encore d'évaluation
- Mathematics (0580/13) October/November 2019Document12 pagesMathematics (0580/13) October/November 2019kdebipershadPas encore d'évaluation
- Lab Report Bacteria CountDocument5 pagesLab Report Bacteria Countsarahyahaya67% (3)
- BQ 76 PL 102Document23 pagesBQ 76 PL 102AlexPas encore d'évaluation
- PM BCE DCS Crash WebDocument4 pagesPM BCE DCS Crash WebAna Paola VazquezPas encore d'évaluation
- Excretion in Humans: Test Yourself 11.1 (Page 223)Document2 pagesExcretion in Humans: Test Yourself 11.1 (Page 223)leePas encore d'évaluation
- Firetroll User Interface Manual Ns550f-01-Instruction-manualDocument16 pagesFiretroll User Interface Manual Ns550f-01-Instruction-manualMike CerreroPas encore d'évaluation
- Intro 4 - Substantive Concepts: Description Remarks and Examples References Also SeeDocument19 pagesIntro 4 - Substantive Concepts: Description Remarks and Examples References Also SeeAntonella PetrilloPas encore d'évaluation
- Flower-Visiting Insect Pollinators of Mustard (Brassica: Napus) in Jammu RegionDocument7 pagesFlower-Visiting Insect Pollinators of Mustard (Brassica: Napus) in Jammu RegionMamata SubediPas encore d'évaluation
- Sony SDM-N50R PDFDocument76 pagesSony SDM-N50R PDFFöldi BélaPas encore d'évaluation
- Kitar FosforusDocument4 pagesKitar FosforusMohd Hakimi MD Setapa100% (1)
- Reading Report Student's Name: Leonel Lipa Cusi Teacher's Name: Maria Del Pilar, Quintana EspinalDocument2 pagesReading Report Student's Name: Leonel Lipa Cusi Teacher's Name: Maria Del Pilar, Quintana EspinalleonellipaPas encore d'évaluation
- TP 3017D Taman Angkasa Nuri - V01Document25 pagesTP 3017D Taman Angkasa Nuri - V01Najwa AzmanPas encore d'évaluation
- SampleDocument43 pagesSampleSri E.Maheswar Reddy Assistant ProfessorPas encore d'évaluation
- Class 10 Science Chapter 2 Revision NotesDocument16 pagesClass 10 Science Chapter 2 Revision NotesKriish RatnaniPas encore d'évaluation
- NOJA 520 05 SCADA Interface Description PDFDocument24 pagesNOJA 520 05 SCADA Interface Description PDFsergio torrez vargasPas encore d'évaluation
- Shape and Volume: A Presentation On AcousticsDocument35 pagesShape and Volume: A Presentation On AcousticsSiddharth BhandariPas encore d'évaluation
- GenMath11 Q1 Mod26 Domain and Range of Logarithmic Functions 08082020Document19 pagesGenMath11 Q1 Mod26 Domain and Range of Logarithmic Functions 08082020Charity Myrh Pasquin ArzagaPas encore d'évaluation
- Chm361-Chapter 3 SolidDocument60 pagesChm361-Chapter 3 Solidfatin harrisPas encore d'évaluation
- Exercises Conditional SentencesDocument2 pagesExercises Conditional SentencesDivine GuancoPas encore d'évaluation
- 1575 Tania SultanaDocument10 pages1575 Tania SultanaTania SultanaPas encore d'évaluation
- LAB211 Assignment: Title Background ContextDocument2 pagesLAB211 Assignment: Title Background ContextDuong Quang Long QP3390Pas encore d'évaluation
- LSMW To Update Customer Master Records With Standard ObjectDocument9 pagesLSMW To Update Customer Master Records With Standard ObjectShahid_ONPas encore d'évaluation
- His To GramsDocument15 pagesHis To GramsMaryam HasanPas encore d'évaluation
- PDPP - Presentation.3.Concurrent. Engineering - January.2021Document17 pagesPDPP - Presentation.3.Concurrent. Engineering - January.2021Ashish KumarPas encore d'évaluation
- DC Lecture Slides 1 - Information TheoryDocument22 pagesDC Lecture Slides 1 - Information TheoryG VenkateshPas encore d'évaluation
- Prediction of Graduate Admission IEEE - 2020Document6 pagesPrediction of Graduate Admission IEEE - 2020Anu RamanujamPas encore d'évaluation
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tD'EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tÉvaluation : 4.5 sur 5 étoiles4.5/5 (27)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosD'EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosÉvaluation : 5 sur 5 étoiles5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionD'EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionÉvaluation : 4.5 sur 5 étoiles4.5/5 (543)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersD'Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersÉvaluation : 5 sur 5 étoiles5/5 (1)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonD'EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonÉvaluation : 5 sur 5 étoiles5/5 (2)
- Power System Control and ProtectionD'EverandPower System Control and ProtectionB. Don RussellÉvaluation : 4 sur 5 étoiles4/5 (11)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeD'EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeÉvaluation : 4.5 sur 5 étoiles4.5/5 (10)
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...D'EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Pas encore d'évaluation
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsD'EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsPas encore d'évaluation
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsD'EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsÉvaluation : 3.5 sur 5 étoiles3.5/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialD'EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Guide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)D'EverandGuide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Évaluation : 4 sur 5 étoiles4/5 (2)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionD'EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionÉvaluation : 4 sur 5 étoiles4/5 (331)
- Teach Yourself Electricity and Electronics, 6th EditionD'EverandTeach Yourself Electricity and Electronics, 6th EditionÉvaluation : 3.5 sur 5 étoiles3.5/5 (15)
- Analog Design and Simulation Using OrCAD Capture and PSpiceD'EverandAnalog Design and Simulation Using OrCAD Capture and PSpicePas encore d'évaluation
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesD'EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesÉvaluation : 5 sur 5 étoiles5/5 (1)
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldD'EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldÉvaluation : 4 sur 5 étoiles4/5 (87)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsD'EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsÉvaluation : 4 sur 5 étoiles4/5 (5)