Vous aimerez peut-être aussi
- Control Exceptions and Deficiencies Evaluation FrameworkDocument22 pagesControl Exceptions and Deficiencies Evaluation Frameworkmarinas80100% (1)
- 1 Direct Dynamics Newton Euler Equations of MotionDocument33 pages1 Direct Dynamics Newton Euler Equations of MotionAbhishek KumarPas encore d'évaluation
- CH-10 Plane Motion of Rigid Bodies 2Document13 pagesCH-10 Plane Motion of Rigid Bodies 2Anshuman SinghPas encore d'évaluation
- Group 1 Nondigital Instructional MaterialsDocument22 pagesGroup 1 Nondigital Instructional MaterialsJhon Paul Esplanada Soriano100% (1)
- Articulo - Pendulo SimpleDocument10 pagesArticulo - Pendulo SimpleeulalioaguilarPas encore d'évaluation
- Dynamic LectureDocument99 pagesDynamic LecturePob ParatPas encore d'évaluation
- Chapter 17Document8 pagesChapter 17baron_van_pepsiePas encore d'évaluation
- Lattice VibrationsDocument8 pagesLattice VibrationsAnirbanMandalPas encore d'évaluation
- Physics Oscillations For IITDocument10 pagesPhysics Oscillations For IITGourav SomPas encore d'évaluation
- Levitron SCSXCDocument8 pagesLevitron SCSXCEnrique Ramos CalvoPas encore d'évaluation
- Kinetics of Rigid BodyDocument32 pagesKinetics of Rigid BodyAdrian AbdillaPas encore d'évaluation
- DinamicaDocument20 pagesDinamicaKARENPas encore d'évaluation
- Inverted PendulumDocument6 pagesInverted PendulumRandyHagenPas encore d'évaluation
- PC235W13 Assignment4 SolutionsDocument12 pagesPC235W13 Assignment4 SolutionskwokPas encore d'évaluation
- Simple Harmonic Motion - WikipediaDocument33 pagesSimple Harmonic Motion - WikipediaRajesh KumarPas encore d'évaluation
- Hula HoopDocument10 pagesHula HoopThipok Ben Rak-amnouykitPas encore d'évaluation
- Kinetics of Rigid BodyDocument32 pagesKinetics of Rigid BodyMuhammad FirdawsPas encore d'évaluation
- Simple Harmonic Motion - WikipediaDocument10 pagesSimple Harmonic Motion - WikipediaDuy Khanh NguyễnPas encore d'évaluation
- Oscillations: 15.1. Simple Harmonic MotionDocument13 pagesOscillations: 15.1. Simple Harmonic Motioneka123Pas encore d'évaluation
- SHM and Gravitation SlideDocument29 pagesSHM and Gravitation SlideKofoworola MikailPas encore d'évaluation
- RotationProject271 M9rehmaDocument10 pagesRotationProject271 M9rehmaabdellatiftifa3333Pas encore d'évaluation
- First Integrals. Reduction. The 2-Body ProblemDocument19 pagesFirst Integrals. Reduction. The 2-Body ProblemShweta SridharPas encore d'évaluation
- Oscillations of A Rigid Body The Physical Pendulum: Experiment # 17Document12 pagesOscillations of A Rigid Body The Physical Pendulum: Experiment # 17Zi Xian OoiPas encore d'évaluation
- Chapter 12Document10 pagesChapter 12Anonymous L90zA7H9yPas encore d'évaluation
- Dynamics Chapter 13Document9 pagesDynamics Chapter 13ABDFERPas encore d'évaluation
- Harmonic Oscillator I: Introduction:) On The Particle VanishesDocument17 pagesHarmonic Oscillator I: Introduction:) On The Particle Vanishespusa123Pas encore d'évaluation
- 2008 F Ma SolutionsDocument4 pages2008 F Ma SolutionsWeasley WavesPas encore d'évaluation
- Simple Harmonic MotionDocument13 pagesSimple Harmonic MotionFree ReptilePas encore d'évaluation
- WilberforceDocument16 pagesWilberforce123chess0% (1)
- UNIFORM CIRCULAR MOTION - Notes PDFDocument5 pagesUNIFORM CIRCULAR MOTION - Notes PDFJohnston ThevarajahPas encore d'évaluation
- Classical 093Document33 pagesClassical 093Julian David Henao EscobarPas encore d'évaluation
- MIT2 003SCF11 Pset2 SolDocument16 pagesMIT2 003SCF11 Pset2 SolproflaruscoPas encore d'évaluation
- 5.6 Unforced Mechanical Vibrations: Simple Harmonic MotionDocument8 pages5.6 Unforced Mechanical Vibrations: Simple Harmonic MotionHaridev MoorthyPas encore d'évaluation
- Oscillation SDocument25 pagesOscillation SAbhijithtej VaddeboinaPas encore d'évaluation
- Laws of Motion (Irodov)Document70 pagesLaws of Motion (Irodov)akhileshvv123Pas encore d'évaluation
- Example Problem On Equation of MotionDocument2 pagesExample Problem On Equation of MotionvempadareddyPas encore d'évaluation
- Transient Analysis in FEA - (New)Document57 pagesTransient Analysis in FEA - (New)Shreya PatilPas encore d'évaluation
- Chapter 15 Electric FieldsDocument17 pagesChapter 15 Electric FieldsdrewPas encore d'évaluation
- Rotational Dynamics II: Rotation About A Fixed AxisDocument11 pagesRotational Dynamics II: Rotation About A Fixed Axisrizal123Pas encore d'évaluation
- Ladder Princton AnalysisDocument6 pagesLadder Princton AnalysisLaymanConjecturePas encore d'évaluation
- Oscillations I. Simple Harmonic MotionDocument7 pagesOscillations I. Simple Harmonic MotionAjjenk ChuaaPas encore d'évaluation
- Migdal PolyakovDocument8 pagesMigdal PolyakovStephen RandallPas encore d'évaluation
- Dynamics - Equation of MotionsDocument12 pagesDynamics - Equation of MotionsJancis TugadePas encore d'évaluation
- 1979 Hundal - Response of A Base Excited System With Coulomb and Viscous FrictionDocument8 pages1979 Hundal - Response of A Base Excited System With Coulomb and Viscous FrictionAlexander Alvarez SanchezPas encore d'évaluation
- Frame Dragging With Optical VorticesDocument13 pagesFrame Dragging With Optical VorticesJames StrohaberPas encore d'évaluation
- Chapter 9 - DynamicDocument23 pagesChapter 9 - DynamicAbood BuriahiPas encore d'évaluation
- @kul 2 SHM - Circular - EnergiDocument31 pages@kul 2 SHM - Circular - EnergiLalitakuPas encore d'évaluation
- Impulse MomentumDocument29 pagesImpulse MomentumpinkysushuPas encore d'évaluation
- Simple Harmonic MotionDocument51 pagesSimple Harmonic MotionIH MarufPas encore d'évaluation
- Analytical Perturbative Approach To Periodic Orbits in The Homogeneous Quartic Oscillator PotentialDocument16 pagesAnalytical Perturbative Approach To Periodic Orbits in The Homogeneous Quartic Oscillator PotentialAnonymous zRHb4R7CGdPas encore d'évaluation
- Torque & Equilibrium ConditionsDocument13 pagesTorque & Equilibrium ConditionsJohn Dale IbalePas encore d'évaluation
- MEN-351-criticl Speed-Manuscript 20181225Document8 pagesMEN-351-criticl Speed-Manuscript 20181225laura villarroelPas encore d'évaluation
- Experiment 12: Simple Harmonic Motion: I. About The ExperimentDocument6 pagesExperiment 12: Simple Harmonic Motion: I. About The ExperimentAnurag SharmaPas encore d'évaluation
- DOM-I-Force Analysis PDFDocument26 pagesDOM-I-Force Analysis PDFNaveenKrishPas encore d'évaluation
- Problem Sheet 8Document7 pagesProblem Sheet 8AliOucharPas encore d'évaluation
- Theory: When A Rigid Body With A Fixed Pivot Point O, Is Acted Upon by A ForceDocument2 pagesTheory: When A Rigid Body With A Fixed Pivot Point O, Is Acted Upon by A ForceNordiana IdrisPas encore d'évaluation
- Chapter 9Document22 pagesChapter 9Sherena Peter GovindPas encore d'évaluation
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?D'EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?Pas encore d'évaluation
- Difference Equations in Normed Spaces: Stability and OscillationsD'EverandDifference Equations in Normed Spaces: Stability and OscillationsPas encore d'évaluation
- Elizabeth Anne HolmesDocument2 pagesElizabeth Anne HolmesShwethaPas encore d'évaluation
- Aamir KhanDocument8 pagesAamir KhanShwethaPas encore d'évaluation
- With A Heavy Heart, India Prepares For Sachin FarewellDocument4 pagesWith A Heavy Heart, India Prepares For Sachin FarewellShwethaPas encore d'évaluation
- Cuisine of KarnatakaDocument13 pagesCuisine of KarnatakaShwetha100% (1)
- Punjab UNiversity MSC Hons. School Physics ElectronicsDocument41 pagesPunjab UNiversity MSC Hons. School Physics ElectronicsDarrenLovelockPas encore d'évaluation
- PIT Error Overview - ParetoDocument208 pagesPIT Error Overview - ParetoHariharan Yelomalei50% (2)
- Sustainable Architecture WikiDocument9 pagesSustainable Architecture WikisiddiqueaquibPas encore d'évaluation
- Technical Data Speedmaster CX 75Document2 pagesTechnical Data Speedmaster CX 75fongkiePas encore d'évaluation
- WebSphere Application Server AMI Cheatsheet For DemoDocument2 pagesWebSphere Application Server AMI Cheatsheet For DemoYakura CoffeePas encore d'évaluation
- flowswitchHFS25 PDFDocument2 pagesflowswitchHFS25 PDFlajosmolPas encore d'évaluation
- CV Europass 20190114 LucianConstantin enDocument2 pagesCV Europass 20190114 LucianConstantin enLucian DumitrachePas encore d'évaluation
- DOA 19 Leaflet Framini 2p en-GB-ID High-ResDocument2 pagesDOA 19 Leaflet Framini 2p en-GB-ID High-ResHeri SiswantoPas encore d'évaluation
- What Is SAP Reconciliation Account - ERProofDocument10 pagesWhat Is SAP Reconciliation Account - ERProofShailesh SuranaPas encore d'évaluation
- OP5142 User Manual-ADocument40 pagesOP5142 User Manual-AJignesh MakwanaPas encore d'évaluation
- Mom MF-1Document79 pagesMom MF-1AnbuPas encore d'évaluation
- Public Relations vs. Propaganda: Alexandru BASTIANDocument6 pagesPublic Relations vs. Propaganda: Alexandru BASTIANFatima AshrafPas encore d'évaluation
- ThermodynamicsDocument60 pagesThermodynamicsMahender ThotakuriPas encore d'évaluation
- Shortcut To English CollocationDocument240 pagesShortcut To English Collocationtiago90% (10)
- Maximum Remaining - CodeChefDocument3 pagesMaximum Remaining - CodeChefShubhi SinghPas encore d'évaluation
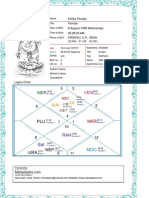
- Kritika Pandey (Kaushambi)Document15 pagesKritika Pandey (Kaushambi)nishink9Pas encore d'évaluation
- 505xt 1 en PDFDocument242 pages505xt 1 en PDFSyed Mohammad NaveedPas encore d'évaluation
- MedigpsDocument8 pagesMedigpsAlex HillPas encore d'évaluation
- Allen BradleyDocument10 pagesAllen BradleyenggomarpuPas encore d'évaluation
- Lesson Plan GagneDocument2 pagesLesson Plan Gagnechiew gin siongPas encore d'évaluation
- 2009 S+S BrochureDocument45 pages2009 S+S BrochureSMITH+SMITHPas encore d'évaluation
- Lecture 9 - Symmetry & Concentricity, Expanded Position TolerancingDocument19 pagesLecture 9 - Symmetry & Concentricity, Expanded Position Tolerancingג'ון ירוקPas encore d'évaluation
- Circular QueueDocument10 pagesCircular QueuesalembalkiPas encore d'évaluation
- Asic Flow: Synopsys - ConstraintsDocument2 pagesAsic Flow: Synopsys - ConstraintsarghaPas encore d'évaluation
- Human BehaviorDocument14 pagesHuman BehaviorJay Ann AguilarPas encore d'évaluation
- Reflection On Written AssignmentDocument3 pagesReflection On Written Assignmentapi-302720012Pas encore d'évaluation
- B1 IF-Clauses IF006: WWW - English-Practice - atDocument2 pagesB1 IF-Clauses IF006: WWW - English-Practice - atAyeshaPas encore d'évaluation
- CEBM Levels of Evidence Introduction 2.1Document3 pagesCEBM Levels of Evidence Introduction 2.1Anida SaNiia BecKzPas encore d'évaluation