Vous aimerez peut-être aussi
- Introduction To Basic Vibration AnalysisDocument162 pagesIntroduction To Basic Vibration AnalysisΡαφαηλ Καμ.100% (2)
- Basic Vibration AnalysisDocument52 pagesBasic Vibration Analysisgpradipta100% (3)
- Troubleshooting Rotating Machinery: Including Centrifugal Pumps and Compressors, Reciprocating Pumps and Compressors, Fans, Steam Turbines, Electric Motors, and MoreD'EverandTroubleshooting Rotating Machinery: Including Centrifugal Pumps and Compressors, Reciprocating Pumps and Compressors, Fans, Steam Turbines, Electric Motors, and MorePas encore d'évaluation
- Vibration Periodic Table WPDocument7 pagesVibration Periodic Table WPCharlene MejalaPas encore d'évaluation
- Vibration Field Tehcnician Guide PDFDocument21 pagesVibration Field Tehcnician Guide PDFadnane adnanePas encore d'évaluation
- Manual CSI Ultraspec 8000Document116 pagesManual CSI Ultraspec 8000ReginaldoVieiradaSilvaPas encore d'évaluation
- ISO 18436 Category IV Vibration Analyst Training TopicsDocument1 pageISO 18436 Category IV Vibration Analyst Training TopicsDean LofallPas encore d'évaluation
- Vibration Analysis For Machinery Health Diagnosis: Emerson SumicoDocument1 pageVibration Analysis For Machinery Health Diagnosis: Emerson SumicoTeguh SPas encore d'évaluation
- Vibration Analysis Manual Rev0Document143 pagesVibration Analysis Manual Rev0iradanke100% (5)
- EM104 - Orbital Analysis - Kelm - 0612Document16 pagesEM104 - Orbital Analysis - Kelm - 0612RobertoSlzr100% (1)
- Introduction To PeakvueDocument55 pagesIntroduction To PeakvueAhmed Nazeem100% (4)
- VibrationDocument54 pagesVibrationmayureshrmahajan100% (3)
- SDT Lubrication ULTRASONIDO INGLES PDFDocument14 pagesSDT Lubrication ULTRASONIDO INGLES PDFALONSO SOLÍSPas encore d'évaluation
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisD'EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisÉvaluation : 4 sur 5 étoiles4/5 (2)
- ILearnReliability - Professional DevelopmentDocument5 pagesILearnReliability - Professional DevelopmentsalyPas encore d'évaluation
- BearingDocument41 pagesBearingM.IBRAHEEMPas encore d'évaluation
- Vibration MonitoringDocument67 pagesVibration MonitoringApurv Khandelwal100% (4)
- Tunisia Bently Presentation DayDocument208 pagesTunisia Bently Presentation DayHamdi Mohamed100% (1)
- Introduction To Vibration Analysis Program - Bnetly NevadaDocument52 pagesIntroduction To Vibration Analysis Program - Bnetly NevadaSam100% (3)
- Training Program On Vibration AnalysisDocument55 pagesTraining Program On Vibration Analysismadan02380% (5)
- Vibration Assessment QuizDocument2 pagesVibration Assessment QuizJose Luis RattiaPas encore d'évaluation
- Apm Book PDFDocument314 pagesApm Book PDFZahid MasoodPas encore d'évaluation
- Vibration Analysis Level - 1 FinalDocument265 pagesVibration Analysis Level - 1 FinalSaadKianiPas encore d'évaluation
- Vibration Field Guide (For the Newbie Vibration Analyst)D'EverandVibration Field Guide (For the Newbie Vibration Analyst)Pas encore d'évaluation
- ORBIT AnalysisDocument4 pagesORBIT AnalysisManoj PaneriPas encore d'évaluation
- Training CourseDocument4 pagesTraining CourseMohanManoPas encore d'évaluation
- 1.2 TOFD Digitization Principles 2010Document35 pages1.2 TOFD Digitization Principles 2010Hoang Diep PhanPas encore d'évaluation
- Basics Vibration MeasurementDocument5 pagesBasics Vibration MeasurementMohan Arumugavallal100% (1)
- Pump Vibration-Case StudiesDocument10 pagesPump Vibration-Case StudiesGyogi MitsutaPas encore d'évaluation
- ISO 18436 Category IVDocument2 pagesISO 18436 Category IVzona amrullohPas encore d'évaluation
- Beginning Vibration Analysis PDFDocument96 pagesBeginning Vibration Analysis PDFromadhinhoPas encore d'évaluation
- Up9000 ManualDocument33 pagesUp9000 Manualho-faPas encore d'évaluation
- Shock Pulse Monitoring: ApplicationsDocument18 pagesShock Pulse Monitoring: Applicationshari krishna100% (1)
- Centrifugal Pump Failures During First Year OperationDocument53 pagesCentrifugal Pump Failures During First Year OperationChristian SantillanPas encore d'évaluation
- Bump TestDocument5 pagesBump Testwsjouri2510Pas encore d'évaluation
- Vibration Basics 2Document82 pagesVibration Basics 2lomesh021Pas encore d'évaluation
- 5 Successful Predictive Vibrations - March - 2012Document28 pages5 Successful Predictive Vibrations - March - 2012jorgemegok1860Pas encore d'évaluation
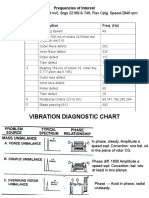
- Vibration Diagnostic Chart1Document16 pagesVibration Diagnostic Chart1Anand KumarPas encore d'évaluation
- Forsthoffer’s Component Condition MonitoringD'EverandForsthoffer’s Component Condition MonitoringÉvaluation : 4 sur 5 étoiles4/5 (2)
- 01-Beginning Vibration AnalysisDocument153 pages01-Beginning Vibration AnalysisAnonymous ffje1rpa100% (1)
- Vibration Analysis Certification Exam Certified Analyst Category I Principles of Vibration Test Sample Question PDFDocument1 pageVibration Analysis Certification Exam Certified Analyst Category I Principles of Vibration Test Sample Question PDFMohammed Kamel TonyPas encore d'évaluation
- Motor Vibration AnalysisDocument61 pagesMotor Vibration Analysiskiki kamuiPas encore d'évaluation
- Vibration BasicsDocument120 pagesVibration Basicspradeep.selvarajan100% (1)
- Structural Health MonitoringD'EverandStructural Health MonitoringDaniel BalageasPas encore d'évaluation
- Why Industrial Bearings Fail: Analysis, Maintenance, and PreventionD'EverandWhy Industrial Bearings Fail: Analysis, Maintenance, and PreventionPas encore d'évaluation
- Case Studies #4: Professional Services For Proactive MaintenanceDocument13 pagesCase Studies #4: Professional Services For Proactive MaintenanceMiguel VillegasPas encore d'évaluation
- Advanced Vibration AnalysisDocument24 pagesAdvanced Vibration AnalysisM Hamza NadeemPas encore d'évaluation
- Basic Iris M Version2.3 PDFDocument109 pagesBasic Iris M Version2.3 PDFMuhammad Fahmi MahmudPas encore d'évaluation
- Turbomachinery Vibration Monitoring PDFDocument150 pagesTurbomachinery Vibration Monitoring PDFTheerayoot Poomchai100% (3)
- Gearbox Vibration Analysis - Analysis Techniques: The Peril of Wall Chart' AnalystsDocument18 pagesGearbox Vibration Analysis - Analysis Techniques: The Peril of Wall Chart' AnalystsRICARDO OLIVEROPas encore d'évaluation
- 2120 Series Manual (2017 - 08 - 21 23 - 19 - 04 UTC) PDFDocument362 pages2120 Series Manual (2017 - 08 - 21 23 - 19 - 04 UTC) PDFReginaldoVieiradaSilva100% (1)
- Predict-Mobius Training BrochureDocument7 pagesPredict-Mobius Training BrochurefaisalPas encore d'évaluation
- ISO Vibration Analysis Certification Exam Cat I Part 3 Signal Processing Ali M Al-Shurafa PDFDocument1 pageISO Vibration Analysis Certification Exam Cat I Part 3 Signal Processing Ali M Al-Shurafa PDFMohammed Kamel TonyPas encore d'évaluation
- ISO 10816 - Severidad en Vibracion PDFDocument2 pagesISO 10816 - Severidad en Vibracion PDFJuan Carlos Bonifacio BricenoPas encore d'évaluation
- AMS Suite Machinery Health Manager - Installation Guide PDFDocument72 pagesAMS Suite Machinery Health Manager - Installation Guide PDFJose Prado50% (2)
- Cage DefectDocument1 pageCage DefectvanmenckPas encore d'évaluation
- Vibration AnalysisDocument14 pagesVibration Analysismu_rajesh3415Pas encore d'évaluation
- Detection of Ski Slopes in Vibration SpectrumsDocument6 pagesDetection of Ski Slopes in Vibration SpectrumsJamie BPas encore d'évaluation
- Understanding Phase MeasurementsDocument6 pagesUnderstanding Phase MeasurementshamadaniPas encore d'évaluation
- Ahmed El Sayed Elsayed Beaet: Mobius Institute Board of CertificationDocument1 pageAhmed El Sayed Elsayed Beaet: Mobius Institute Board of CertificationAhmed BeaetPas encore d'évaluation
- 01-Beginning Vibration Analysis PDFDocument96 pages01-Beginning Vibration Analysis PDFBarcsa RudolfPas encore d'évaluation
- T411100X02X-000 T411100X03X-000 T411100X04X-000 T411100X05X-000 T411100X08X-000Document1 pageT411100X02X-000 T411100X03X-000 T411100X04X-000 T411100X05X-000 T411100X08X-000ReginaldoVieiradaSilvaPas encore d'évaluation
- vb7 Datasheet 116m5255-1Document8 pagesvb7 Datasheet 116m5255-1ReginaldoVieiradaSilvaPas encore d'évaluation
- Detection of Cavitation in Hid TurbinesDocument25 pagesDetection of Cavitation in Hid TurbinesReginaldoVieiradaSilvaPas encore d'évaluation
- 3 Q 00 DimondDocument4 pages3 Q 00 Dimondhosein30Pas encore d'évaluation