Vous aimerez peut-être aussi
- Novo Documento de TextoDocument1 pageNovo Documento de TextoPâmella BernardesPas encore d'évaluation
- 04 - Step Card - RID - GD121 Setor 5 (REV-2) PDFDocument2 pages04 - Step Card - RID - GD121 Setor 5 (REV-2) PDFPâmella BernardesPas encore d'évaluation
- Apresentação - TermografiaDocument9 pagesApresentação - TermografiaPâmella BernardesPas encore d'évaluation
- Introdução à Engenharia de ManutençãoDocument62 pagesIntrodução à Engenharia de ManutençãoAguinaldo Lima100% (3)
- Cronograma QRADocument14 pagesCronograma QRAPâmella BernardesPas encore d'évaluation
- Primeira A Ular NaDocument27 pagesPrimeira A Ular NaPâmella BernardesPas encore d'évaluation
- Guia completo sobre os tipos de sprinklersDocument57 pagesGuia completo sobre os tipos de sprinklersBIANCARDINEPas encore d'évaluation
- Que Sorte A NossaDocument3 pagesQue Sorte A NossaIgor MotizukiPas encore d'évaluation
- Tema 4Document39 pagesTema 4Ataide TsuchiyaPas encore d'évaluation
- Conversão de UnidadesDocument1 pageConversão de UnidadesMatheus PadilhaPas encore d'évaluation
- Redes neurais artificiais: conceitos e modelosDocument89 pagesRedes neurais artificiais: conceitos e modelosPâmella BernardesPas encore d'évaluation
- Trabalho 03Document13 pagesTrabalho 03Pâmella BernardesPas encore d'évaluation
- Trabalho 03Document13 pagesTrabalho 03Pâmella BernardesPas encore d'évaluation
- ConfigDocument24 pagesConfigPâmella BernardesPas encore d'évaluation
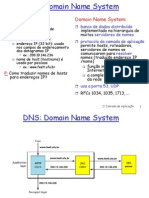
- 6 - Lista 4 - Camada de AplicaçãoDocument2 pages6 - Lista 4 - Camada de AplicaçãoPâmella BernardesPas encore d'évaluation
- Desenvolvimento de Uma Biblioteca Fuzzy para O Controle Autônomo de Um Robô Móvel em Ambiente DesconhecidoDocument6 pagesDesenvolvimento de Uma Biblioteca Fuzzy para O Controle Autônomo de Um Robô Móvel em Ambiente DesconhecidoCarlosOtinianoPas encore d'évaluation
- Lista de exercícios de transporte de fluidosDocument4 pagesLista de exercícios de transporte de fluidosPâmella BernardesPas encore d'évaluation
- Smo ZigbeeDocument9 pagesSmo ZigbeePâmella BernardesPas encore d'évaluation
- Transformada Z UnilateralDocument22 pagesTransformada Z UnilateralPâmella BernardesPas encore d'évaluation
- Projeto Ep PDFDocument1 pageProjeto Ep PDFPâmella BernardesPas encore d'évaluation
- Cap 2 BDocument15 pagesCap 2 BPâmella BernardesPas encore d'évaluation
- Sistema de Controle em Tempo DiscretoDocument1 pageSistema de Controle em Tempo DiscretoPâmella BernardesPas encore d'évaluation
- Metalurgia Do PoDocument4 pagesMetalurgia Do PoPâmella BernardesPas encore d'évaluation
- Tudo PFM P1Document14 pagesTudo PFM P1Pâmella BernardesPas encore d'évaluation
- 1 - 2 - Malha Aberta e FechadaDocument20 pages1 - 2 - Malha Aberta e FechadaWanderley Terci EstevesPas encore d'évaluation
- Ferro SosDocument4 pagesFerro SosPâmella BernardesPas encore d'évaluation
- Caderno ExerciciosfisicaDocument112 pagesCaderno ExerciciosfisicaLigia Bezerra0% (1)
- SnubberDocument10 pagesSnubberCesar CavenaghiPas encore d'évaluation
- Ponte HDocument6 pagesPonte HMarcus SollyvanPas encore d'évaluation
- MaçaroqueiraDocument20 pagesMaçaroqueiraSamantha AndradePas encore d'évaluation
- ITC Disciplina de TopografiaDocument13 pagesITC Disciplina de TopografiaDavidson AguiarPas encore d'évaluation
- Testes CapDocument21 pagesTestes Capelveliz100% (1)
- Instalação mecânica e elétrica do controlador P501Document2 pagesInstalação mecânica e elétrica do controlador P501christian.kojiPas encore d'évaluation
- Ensaio de PermeabilidadeDocument8 pagesEnsaio de PermeabilidadeIsabella C. Braido Do NascimentoPas encore d'évaluation
- Manutenção roçadeirasDocument1 pageManutenção roçadeirasTiago Cavalcante25% (4)
- Turma MedDocument11 pagesTurma MedGilson Dias de PaulaPas encore d'évaluation
- Vaga Assistente Administrativo Santa Maria RSDocument3 pagesVaga Assistente Administrativo Santa Maria RSleonardomoodlePas encore d'évaluation
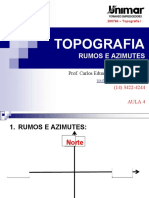
- Calcular o Ângulo Formado Por Uma Cobertura Com A Horizontal. Rumos e AzimutesDocument60 pagesCalcular o Ângulo Formado Por Uma Cobertura Com A Horizontal. Rumos e AzimutesvirgilioPas encore d'évaluation
- Lista de Exercícios de Probabilidade PDFDocument12 pagesLista de Exercícios de Probabilidade PDFRandy Ambrósio QjPas encore d'évaluation
- Manual Bomba Frigostrella BZM Com Capa - Ed 2020 - (09-03-2020) PDFDocument35 pagesManual Bomba Frigostrella BZM Com Capa - Ed 2020 - (09-03-2020) PDFDanilo Magalhães100% (1)
- Avaliação 4 CalculoDocument6 pagesAvaliação 4 CalculoMaritania AlmeidaPas encore d'évaluation
- Regras de acentuação gráficaDocument3 pagesRegras de acentuação gráficaStephanie CardosoPas encore d'évaluation
- Equações do 1o GrauDocument6 pagesEquações do 1o GrauPaulo Rogério Mancino100% (1)
- ENG - 0002 - Informacao - Tecnica - DTE - DTP 1 PDFDocument33 pagesENG - 0002 - Informacao - Tecnica - DTE - DTP 1 PDFAntenógenesPas encore d'évaluation
- MANUAL PA CARREGADEIRA JBCDocument6 pagesMANUAL PA CARREGADEIRA JBCemerson da silva santosPas encore d'évaluation
- Modulação Digital e AnalógicaDocument35 pagesModulação Digital e AnalógicaAlberto HertzPas encore d'évaluation
- Aeronave - BRATI01Document352 pagesAeronave - BRATI01rafaelldalpraPas encore d'évaluation
- Formulário de anotações para prova de Concreto Armado IDocument12 pagesFormulário de anotações para prova de Concreto Armado IGustavo CampestriniPas encore d'évaluation
- Translocação e inserção de proteínas no REDocument7 pagesTranslocação e inserção de proteínas no REJoséPas encore d'évaluation
- Estruturas Algébricas - Aula 3 - Relações e Aplicações IIDocument18 pagesEstruturas Algébricas - Aula 3 - Relações e Aplicações IICarlos Emilio Saraiva SaraivaPas encore d'évaluation
- Tecnologia de produtos cárneos: processamento e conservaçãoDocument99 pagesTecnologia de produtos cárneos: processamento e conservaçãoJanaina Sousa100% (2)
- 1 - Ficha TrabalhoDocument5 pages1 - Ficha Trabalhopaula78oliveira9867100% (1)
- 3 SolubilidadedosfarmacosDocument53 pages3 SolubilidadedosfarmacosMichel Vilarinho CarvalhoPas encore d'évaluation
- Exercícios de física sobre movimento uniforme e variadoDocument2 pagesExercícios de física sobre movimento uniforme e variadolivialshPas encore d'évaluation
- Aula 4Document12 pagesAula 4Aniceto RosarioPas encore d'évaluation
- Simbolismo Junguiano e Os Quatro Elementos Da AstrologiaDocument8 pagesSimbolismo Junguiano e Os Quatro Elementos Da AstrologiaRaQuel QueirozPas encore d'évaluation
- O Biômetro de Bovis - RadiestesiaDocument3 pagesO Biômetro de Bovis - Radiestesiacarla100% (1)
- Vulcão Taal ativo nas FilipinasDocument8 pagesVulcão Taal ativo nas FilipinasAna Filipa Fernandes FigueiredoPas encore d'évaluation
- Produção de Mudas de ParicáDocument13 pagesProdução de Mudas de ParicáFernanda SoaresPas encore d'évaluation