Vous aimerez peut-être aussi
- Análise ConvexaDocument28 pagesAnálise ConvexaJeverson SantosPas encore d'évaluation
- Cálculo Vetorial PDFDocument214 pagesCálculo Vetorial PDFJoão Pedro BragaPas encore d'évaluation
- CircunferenciaDocument7 pagesCircunferenciacon_seguirPas encore d'évaluation
- Resumo Sobre Calculo IntegralDocument7 pagesResumo Sobre Calculo IntegralCrystianne LilianPas encore d'évaluation
- Teme AnalizaDocument7 pagesTeme AnalizaAlina HamzaPas encore d'évaluation
- Tabela PrimitivasDocument2 pagesTabela PrimitivasLouie MouraPas encore d'évaluation
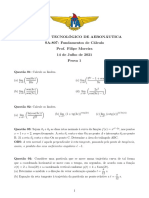
- Solucao Prova Mestrado 2022 2Document4 pagesSolucao Prova Mestrado 2022 2Caio ClarindoPas encore d'évaluation
- Apostila Polinomios Walter TadeuDocument10 pagesApostila Polinomios Walter TadeuDiogo G FreirePas encore d'évaluation
- Niv 17 2Document5 pagesNiv 17 2Amarildo AlvesPas encore d'évaluation
- M1.3ano - Geometria - Analitica - 0 ResumoDocument8 pagesM1.3ano - Geometria - Analitica - 0 ResumodeathdinoPas encore d'évaluation
- FonteDocument13 pagesFonteCarolina GoncalvesPas encore d'évaluation
- Sma0175 Lista1Document5 pagesSma0175 Lista1Elionai dos Santos GouveiaPas encore d'évaluation
- Aula 1 - Conjuntos Num Ericos e Intervalos: Universidade Federal Do Rio Grande Do Norte Escola de Ci Encia e TecnologiaDocument27 pagesAula 1 - Conjuntos Num Ericos e Intervalos: Universidade Federal Do Rio Grande Do Norte Escola de Ci Encia e TecnologiaMicarlos MeisterrPas encore d'évaluation
- Lista 2Document10 pagesLista 2wilsonbarbosa0212Pas encore d'évaluation
- Resolução Da Prova Da EAM 2021Document11 pagesResolução Da Prova Da EAM 2021Mais MatemáticaPas encore d'évaluation
- T Opico 6 - Ajuste de Curvas Por M Inimos Quadrados: Jo Ao B. FlorindoDocument41 pagesT Opico 6 - Ajuste de Curvas Por M Inimos Quadrados: Jo Ao B. FlorindoRoberto NascimentoPas encore d'évaluation
- Res MinitesteB 05 MicroI 2 - CópiaDocument5 pagesRes MinitesteB 05 MicroI 2 - CópiaAdelino José KalengaPas encore d'évaluation
- 3 Funções-Limites PDFDocument5 pages3 Funções-Limites PDFAnonymous gcAng9AXPas encore d'évaluation
- Aref 01 - ResumoDocument4 pagesAref 01 - Resumomatheusbertolino1Pas encore d'évaluation
- Folh Exerc AR3Document14 pagesFolh Exerc AR3Catarina WestwickPas encore d'évaluation
- 7 Revisão Integrais Indefinidas ExerciciosDocument11 pages7 Revisão Integrais Indefinidas ExerciciosjoaolimafisicoPas encore d'évaluation
- Lista 1 P2 No SlideDocument5 pagesLista 1 P2 No SlideJoão Marcos LopesPas encore d'évaluation
- Livro Do Professor 6 AnoDocument22 pagesLivro Do Professor 6 Anodomingos danielPas encore d'évaluation
- Cap2-Controlabilidade, Observabilidade e Estabilidade PDFDocument19 pagesCap2-Controlabilidade, Observabilidade e Estabilidade PDFAna AlvesPas encore d'évaluation
- Ficha Número Seis Teorema de Funções E Sucessões EnquadradasDocument5 pagesFicha Número Seis Teorema de Funções E Sucessões EnquadradasDavidPas encore d'évaluation
- Resolucao Insper 2009 Sem1 Analise Quant Logica q1 10Document10 pagesResolucao Insper 2009 Sem1 Analise Quant Logica q1 10siernanPas encore d'évaluation
- Felipe Acker - Lista 2Document18 pagesFelipe Acker - Lista 2Zair HenriquePas encore d'évaluation
- Reitz Cap1Document12 pagesReitz Cap1osvaldofalvesPas encore d'évaluation
- Unidade I ESTUDO DAS CONICAS 1 Equacao DDocument78 pagesUnidade I ESTUDO DAS CONICAS 1 Equacao DSamara OliveiraPas encore d'évaluation
- Aplicação de Massa e Centro de Massa de Um Fio DelgadoDocument11 pagesAplicação de Massa e Centro de Massa de Um Fio DelgadoAlber Rosa de FigueiredoPas encore d'évaluation
- Integração NuméricaDocument13 pagesIntegração NuméricaDionisio RaonyPas encore d'évaluation
- Polinômio de TaylorDocument5 pagesPolinômio de TaylorRobson SantosPas encore d'évaluation
- Determine o Conjunto Solu C Ao Da Equa C Ao - Z 1 - Re (Z + 1) e Fa Ca Um Esbo Co Deste No Plano de ArgandDocument53 pagesDetermine o Conjunto Solu C Ao Da Equa C Ao - Z 1 - Re (Z + 1) e Fa Ca Um Esbo Co Deste No Plano de ArgandTecnomundoPas encore d'évaluation
- ELE Integral Reta PDFDocument86 pagesELE Integral Reta PDFDaniel Da Costa SilvaPas encore d'évaluation
- Questões de Limites e DerivadasDocument3 pagesQuestões de Limites e DerivadasFilipe MoreiraPas encore d'évaluation
- Lista-Ms211 Calculo Numerico Lista p1 PDFDocument20 pagesLista-Ms211 Calculo Numerico Lista p1 PDFLucas TuãoPas encore d'évaluation
- Lista-Ms211 Calculo Numerico Lista p1 PDFDocument20 pagesLista-Ms211 Calculo Numerico Lista p1 PDFLucas TuãoPas encore d'évaluation
- Formulário de Matemática PDFDocument14 pagesFormulário de Matemática PDFDuarterj2007Pas encore d'évaluation
- Uso Do Polinomio Interpolador de LagrangeDocument6 pagesUso Do Polinomio Interpolador de LagrangecleuberPas encore d'évaluation
- Teorica6 PDFDocument48 pagesTeorica6 PDFDuarte PereiraPas encore d'évaluation
- Gabarito Primeira Avaliação CE084-2021Document5 pagesGabarito Primeira Avaliação CE084-2021Jonathas dos Santos PereiraPas encore d'évaluation
- Lista Calculoi PDFDocument5 pagesLista Calculoi PDFKelly AyumiPas encore d'évaluation
- Cálculo VetorialDocument187 pagesCálculo VetorialdarlanmoreiraPas encore d'évaluation
- IntegraisDocument7 pagesIntegraisBruna MorranaPas encore d'évaluation
- LIsta de MAT130 Mat Discreta PUC RIODocument4 pagesLIsta de MAT130 Mat Discreta PUC RIOlmaraujo67Pas encore d'évaluation
- Resumo Teórico Matemática B - 11º AnoDocument15 pagesResumo Teórico Matemática B - 11º Anoalasoles80% (5)
- Exercicios MC 06Document17 pagesExercicios MC 06Fellipe BotelhoPas encore d'évaluation
- Capitulo 2 DerivadasDocument35 pagesCapitulo 2 DerivadasAntônioPas encore d'évaluation
- 3 - Derivadas - AplicaçõesDocument59 pages3 - Derivadas - AplicaçõesAndré FreirePas encore d'évaluation
- Matematica Discreta ExerciciosDocument48 pagesMatematica Discreta ExerciciosEmanuel Alejandro MacielPas encore d'évaluation
- 3 Lista de Exerc Icios, MA 141Document2 pages3 Lista de Exerc Icios, MA 141v157496Pas encore d'évaluation
- AL 3 - Espaços VetoriaisDocument5 pagesAL 3 - Espaços VetoriaisBruno dos SantosPas encore d'évaluation
- Lista1 ExtraDocument3 pagesLista1 ExtraJoão MarcosPas encore d'évaluation
- FonteDocument16 pagesFontejessica cunhaPas encore d'évaluation
- 9 DerivadaDocument44 pages9 DerivadaMariana PinaPas encore d'évaluation
- S3 Func Varias Var-CII 2016 17Document43 pagesS3 Func Varias Var-CII 2016 17Mariana MagalhãesPas encore d'évaluation
- Newton CotesDocument15 pagesNewton CotesClaudia Zachow MachadoPas encore d'évaluation
- 2 FunçoesDocument40 pages2 FunçoesVictor RodriguesPas encore d'évaluation
- RREO em Foco 3ºbimestre 2023 PublicacaoDocument15 pagesRREO em Foco 3ºbimestre 2023 PublicacaoHugo Fernandes ContábilPas encore d'évaluation
- Mensagens11 Questao de Aula 2 Educacao Literaria Unidade 2Document2 pagesMensagens11 Questao de Aula 2 Educacao Literaria Unidade 2Almerinda CoutinhoPas encore d'évaluation
- Prova Facet PortuguêsDocument3 pagesProva Facet PortuguêsDaniel RodriguePas encore d'évaluation
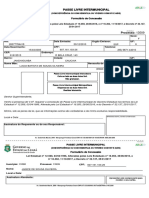
- Sit Passe Livre Confirmacao CadastroDocument5 pagesSit Passe Livre Confirmacao CadastroHãmiséHadajyPas encore d'évaluation
- Cidadania e Empatia DigitalDocument1 pageCidadania e Empatia Digitallina CardosoPas encore d'évaluation
- Cap V - Aulas 7 e 8 - Alocação de Água - Part 1 e 2 - Rev - 2021201Document57 pagesCap V - Aulas 7 e 8 - Alocação de Água - Part 1 e 2 - Rev - 2021201oscar alexandrePas encore d'évaluation
- O Que Estaro Fazendo Com A IgrejaDocument16 pagesO Que Estaro Fazendo Com A IgrejaRodrigo MirandaPas encore d'évaluation
- Curva de ExperiênciaDocument13 pagesCurva de Experiênciadaniela.ferreira.200347Pas encore d'évaluation
- Manual de Manutenção e Tabelas de Manutenção BME 950HDocument47 pagesManual de Manutenção e Tabelas de Manutenção BME 950HAlexandre NicoletiPas encore d'évaluation
- Cardoso, Unicamp SensoresDocument101 pagesCardoso, Unicamp SensoresDaniel BezerraPas encore d'évaluation
- Turmas 2015 - 3º Quadrimestre - UFABCDocument32 pagesTurmas 2015 - 3º Quadrimestre - UFABCb0ltPas encore d'évaluation
- Gestão No Controle de Estoque Estudo de Caso emDocument18 pagesGestão No Controle de Estoque Estudo de Caso emGuilherme MiorimPas encore d'évaluation
- 1 - Estados de Agregação Da MatériaDocument73 pages1 - Estados de Agregação Da MatériaRosianeCristinaCandeuPas encore d'évaluation
- Contrato Servicos PagSeguroDocument89 pagesContrato Servicos PagSeguroWilams BritoPas encore d'évaluation
- MODELAÇÂODocument35 pagesMODELAÇÂOManuel RibeiroPas encore d'évaluation
- TrabalhoDocument4 pagesTrabalhoAndrezaAndradePas encore d'évaluation
- Thomas Kuhn - Filosofia 12º AnoDocument21 pagesThomas Kuhn - Filosofia 12º AnoMagaliPas encore d'évaluation
- Ficha D&D 3.5Document4 pagesFicha D&D 3.5Alan SantosPas encore d'évaluation
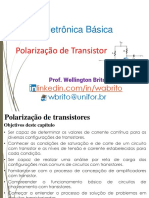
- Capítulo 4 - Polarizacao de TransistorDocument43 pagesCapítulo 4 - Polarizacao de TransistorRobevaldo SantosPas encore d'évaluation
- Orientação Sobre o OdaimokuDocument8 pagesOrientação Sobre o OdaimokuVanessa Dos Santos PortilhoPas encore d'évaluation
- Lista de Colocações BCEDocument99 pagesLista de Colocações BCEbillyjackPas encore d'évaluation
- A Escolha de Um AstronautaDocument1 pageA Escolha de Um AstronautaAndreia LealPas encore d'évaluation
- Plano de Carreira Dos Cargos Técnico-Administrativos em Educação Lei N 11.091-05Document27 pagesPlano de Carreira Dos Cargos Técnico-Administrativos em Educação Lei N 11.091-05Victor BarrosPas encore d'évaluation
- PR - 2420328300 - HA15IP - E12-05 IntranetDocument209 pagesPR - 2420328300 - HA15IP - E12-05 IntranetCláudio LimaPas encore d'évaluation
- NR 24 ResumoDocument2 pagesNR 24 ResumoPhelipe Sousa100% (3)
- Continete AfricanoDocument15 pagesContinete AfricanoDionatan SchmidtPas encore d'évaluation
- Filhos Do Céu - Michel Cassé e Edgar MorinDocument49 pagesFilhos Do Céu - Michel Cassé e Edgar MorinAntonio RomanePas encore d'évaluation
- Escova EscovinhaDocument1 pageEscova Escovinhaedualberta9902Pas encore d'évaluation
- Lutas Nas Aulas de Educação Física Escolar - Revisão Sistemática 2023Document12 pagesLutas Nas Aulas de Educação Física Escolar - Revisão Sistemática 2023Andréea VieiraPas encore d'évaluation
- Dimensionamento & Carga TérmicaDocument70 pagesDimensionamento & Carga TérmicaCarlos Silva67% (3)