Vous aimerez peut-être aussi
- Manual práctico de investigación de operaciones I. 4edD'EverandManual práctico de investigación de operaciones I. 4edÉvaluation : 2.5 sur 5 étoiles2.5/5 (3)
- U1 Ecuaciones DiferencialesDocument38 pagesU1 Ecuaciones DiferencialesBraulio Ubario PargaPas encore d'évaluation
- Ensayo de Programacion LinealDocument5 pagesEnsayo de Programacion LinealJulio César Benitez44% (9)
- Unidad 3 Programación EnteraDocument16 pagesUnidad 3 Programación EnteraElias Chuc Falcon50% (2)
- 3-5 Producto Triple Escalar y VectorialDocument28 pages3-5 Producto Triple Escalar y VectorialOliver5856% (16)
- Clasificación NeurotransmisoresDocument2 pagesClasificación NeurotransmisoresAnthony ACPas encore d'évaluation
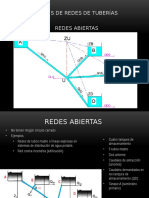
- Análisis de Redes de TuberíasDocument45 pagesAnálisis de Redes de TuberíasFabian Corredor100% (1)
- Investigacion de Operaciones 1 Unidad 3 y 4Document44 pagesInvestigacion de Operaciones 1 Unidad 3 y 4ManuelAlejandroMuñozLópez76% (21)
- Programacion No LinealDocument26 pagesProgramacion No LinealKevin Mike Herrera VegaPas encore d'évaluation
- Programacion Lineal 1Document34 pagesProgramacion Lineal 1api-380710088% (17)
- Ecuac. Diferencial Lineal de Orden 2Document27 pagesEcuac. Diferencial Lineal de Orden 2Alexander RomeroPas encore d'évaluation
- Programacion LinealDocument18 pagesProgramacion LinealAnderson Smith100% (1)
- Proyecto Io Programacion EnteraDocument34 pagesProyecto Io Programacion Enteracarlos cevallos bautista0% (1)
- Programacion ConvexaDocument11 pagesProgramacion ConvexaDexter Alvarado reusPas encore d'évaluation
- Programacionlineal 1Document7 pagesProgramacionlineal 1ALANYS DAYANA GUERRERO PERRAZOPas encore d'évaluation
- Programcion L InealDocument20 pagesProgramcion L InealMarcela CruzPas encore d'évaluation
- Introducción A La Programación LinealDocument4 pagesIntroducción A La Programación Linealruben dario mendoza mezaPas encore d'évaluation
- Programacion No LinealDocument5 pagesProgramacion No LinealStephanie MontesPas encore d'évaluation
- Apuntes de Programación No Lineal - U3 - ISCDocument20 pagesApuntes de Programación No Lineal - U3 - ISCMontes de Oca Piedra Brian MckenziePas encore d'évaluation
- Programación Lineal-Shelsy CruzDocument7 pagesProgramación Lineal-Shelsy CruzMaría LauraPas encore d'évaluation
- Programacion No LinealDocument19 pagesProgramacion No LinealAlex - CrossPas encore d'évaluation
- Programacion No LinealDocument34 pagesProgramacion No LinealAndrés Valdiviezo50% (2)
- Investigación 1Document10 pagesInvestigación 1Zack CalveraPas encore d'évaluation
- Ensayo de Programacion Lineal PDFDocument5 pagesEnsayo de Programacion Lineal PDFadriana bustilloPas encore d'évaluation
- Inv.3 Zapata JoseDocument15 pagesInv.3 Zapata JoseEduardo ZapataPas encore d'évaluation
- Función ObjetivoDocument2 pagesFunción ObjetivoIngrid Tatiana Betancur BoneloPas encore d'évaluation
- U3. Programacion No LinealDocument13 pagesU3. Programacion No LinealxXDeathgasmXxPas encore d'évaluation
- Aplicaciones de La Programación LinealDocument6 pagesAplicaciones de La Programación LinealKevin CastañedaPas encore d'évaluation
- Programacion Por MetasDocument16 pagesProgramacion Por MetasFIORELLA LIPas encore d'évaluation
- Programacion Lineal en Inestigacion de Operaciones Metodo Simplex Gabriel Alastre 215054Document15 pagesProgramacion Lineal en Inestigacion de Operaciones Metodo Simplex Gabriel Alastre 215054Gabriel AlejandroPas encore d'évaluation
- Trabajo Final InvopeDocument17 pagesTrabajo Final InvopeSofia ArancibiaPas encore d'évaluation
- Universidad Tecnológica Del PerúDocument26 pagesUniversidad Tecnológica Del PerúRichardPas encore d'évaluation
- Investigacion de Operaciones 1Document20 pagesInvestigacion de Operaciones 1Jonathan Ramiro Grijalva herreraPas encore d'évaluation
- 1 Apoyo A La Toma de Decisiones Con Solver IDocument20 pages1 Apoyo A La Toma de Decisiones Con Solver IRobertoNegretePas encore d'évaluation
- Formulación y Aplicacion de Modelos de Programación LinealDocument11 pagesFormulación y Aplicacion de Modelos de Programación LinealNicole Maricel Romero LezamaPas encore d'évaluation
- Programación No Lineal 20%-TrabajoDocument22 pagesProgramación No Lineal 20%-Trabajoenmanuel morles tilleroPas encore d'évaluation
- Investigacion Formativa - 2Document6 pagesInvestigacion Formativa - 2Amancio Shuan sanchezPas encore d'évaluation
- Antologia Unidad 4Document15 pagesAntologia Unidad 4osielPas encore d'évaluation
- Optimizacion NumericaDocument47 pagesOptimizacion NumericaFercho EspinosaPas encore d'évaluation
- La Programación LinealDocument14 pagesLa Programación LinealCesar Herrera MuñozPas encore d'évaluation
- 2 6AnalisisdeResultadosDocument8 pages2 6AnalisisdeResultadosMercedes Alicia HrPas encore d'évaluation
- Modelo de Programacion No LinealDocument37 pagesModelo de Programacion No Linealkleiber_2007Pas encore d'évaluation
- Unidad II Toma de DecisionesDocument10 pagesUnidad II Toma de DecisionesFavioPas encore d'évaluation
- Tarea 2 Programación MatemáticaDocument4 pagesTarea 2 Programación MatemáticaAlberto Garcia PerezPas encore d'évaluation
- Informe de Programacion Lineal y No LinealDocument10 pagesInforme de Programacion Lineal y No LinealGracely MaldonadoPas encore d'évaluation
- Programación Lineal Entera y ParametricaDocument26 pagesProgramación Lineal Entera y ParametricaEduardo Tello100% (1)
- Analisis de PL y EconomiaDocument11 pagesAnalisis de PL y EconomiaTami14Pas encore d'évaluation
- Lectura Introducción A La Programación LinealDocument3 pagesLectura Introducción A La Programación LinealAlexander RodriguezPas encore d'évaluation
- Optimizacion de Procesos Quimicos PDFDocument4 pagesOptimizacion de Procesos Quimicos PDFMartin Morales RodriguezPas encore d'évaluation
- Compendio-Unidad 2-2Document15 pagesCompendio-Unidad 2-2Angie AlcívarPas encore d'évaluation
- Programacion No Lineal Doc. ScridbDocument13 pagesProgramacion No Lineal Doc. ScridbAmairani ZuñigaPas encore d'évaluation
- 18 Metodo de Programacion LinealDocument2 pages18 Metodo de Programacion LinealYamir Bautista Q.Pas encore d'évaluation
- Programación GeometricaDocument14 pagesProgramación GeometricaEduardo SánchezPas encore d'évaluation
- Diop U2 A3 KeeaDocument12 pagesDiop U2 A3 KeeaKenia EspinosaPas encore d'évaluation
- 2 Act 1 Corte Inv OperacionesDocument5 pages2 Act 1 Corte Inv OperacionesGerardo miguel LealPas encore d'évaluation
- Trabajo de Programación LinealDocument13 pagesTrabajo de Programación LinealFrank BecklesPas encore d'évaluation
- 20102isi306os01t069 PDFDocument136 pages20102isi306os01t069 PDFSamuel CardonaPas encore d'évaluation
- 3.1 Conceptos Básicos de Problemas de Programación No LinealDocument3 pages3.1 Conceptos Básicos de Problemas de Programación No LinealmartinezPas encore d'évaluation
- Programacion LinealDocument8 pagesProgramacion LinealDarío MayPas encore d'évaluation
- Programacion Lineal Daniel Corregido.Document24 pagesProgramacion Lineal Daniel Corregido.LILILAURAPas encore d'évaluation
- Modelos Lineales y No Lineales: ModeloDocument8 pagesModelos Lineales y No Lineales: ModeloKaren Yoalli Rebollar SantillanPas encore d'évaluation
- Esquema de Base de DatosDocument2 pagesEsquema de Base de DatosascadsemastecPas encore d'évaluation
- Inv Op Ige A U2 Eq6Document20 pagesInv Op Ige A U2 Eq6Fernanda Larraga gallegosPas encore d'évaluation
- López Fernández LidiaDocument65 pagesLópez Fernández LidiaMarkPas encore d'évaluation
- Tema 1.1 - Aplicaciones Prácticas de Programación LinealDocument24 pagesTema 1.1 - Aplicaciones Prácticas de Programación Lineallidia fernandezPas encore d'évaluation
- Artículos de Gestion de CalidadDocument5 pagesArtículos de Gestion de CalidadAnthony ACPas encore d'évaluation
- Deber de Calculo Integral PDFDocument11 pagesDeber de Calculo Integral PDFAnthony ACPas encore d'évaluation
- Detector de Mentira ArduinoDocument4 pagesDetector de Mentira ArduinoAnthony ACPas encore d'évaluation
- CAPÍTULO 27 AldoDocument13 pagesCAPÍTULO 27 AldoAldo OmarPas encore d'évaluation
- Examen AlgebraDocument16 pagesExamen AlgebraDiego Muñoz50% (2)
- PCA 2022 Matemáticas Básica IntensivaDocument17 pagesPCA 2022 Matemáticas Básica IntensivaGENARO BETSABE BERMUDEZ GARCIAPas encore d'évaluation
- Modelo de Transporte 2Document5 pagesModelo de Transporte 2José RicaurtePas encore d'évaluation
- Cap Iv 3Document13 pagesCap Iv 3JhonnyPas encore d'évaluation
- Analisis y Estudio de La Poligonal AbierDocument4 pagesAnalisis y Estudio de La Poligonal AbierJose RangelPas encore d'évaluation
- Tabla Descriptiva 3ro Grado Secundaria Matematicas 50Document30 pagesTabla Descriptiva 3ro Grado Secundaria Matematicas 50Jonathan Reyes PPas encore d'évaluation
- Método de La Gran MDocument5 pagesMétodo de La Gran MhjmesaPas encore d'évaluation
- s24 TV 1.guiatv Fusionado PDFDocument101 pagess24 TV 1.guiatv Fusionado PDFJuanSandroMonsalveRuizPas encore d'évaluation
- Evaluame Ed 9Document638 pagesEvaluame Ed 9Nickolas Cavalera Monroy50% (2)
- Programación LinealDocument6 pagesProgramación Linealdiderot666Pas encore d'évaluation
- Fundamentos de SistemasDocument25 pagesFundamentos de SistemaskevinPas encore d'évaluation
- Colaborativo Unidad 3Document9 pagesColaborativo Unidad 3OsdyPas encore d'évaluation
- Taller Vectores, Rectas y PlanosDocument2 pagesTaller Vectores, Rectas y PlanosJhan Carlos Gallardo OchoaPas encore d'évaluation
- Tema1 - Introducción Al Modelamiento y Simulación de Procesos PDFDocument24 pagesTema1 - Introducción Al Modelamiento y Simulación de Procesos PDFYeSsi Anton PaivaPas encore d'évaluation
- Folle EcuaDiferencialesDocument81 pagesFolle EcuaDiferencialesJose Jara AlekejosPas encore d'évaluation
- Act 9 EcuacionesDocument7 pagesAct 9 EcuacionesWilliam AriasPas encore d'évaluation
- 07 EcuacionesDocument27 pages07 EcuacionesSeruPas encore d'évaluation
- Aplicaciones de Matrices y Sistemas de Funciones LinealesDocument7 pagesAplicaciones de Matrices y Sistemas de Funciones LinealesJean Carlos ZambranoPas encore d'évaluation
- Modelosenmedicina Campollo 1Document23 pagesModelosenmedicina Campollo 1Adriana Rosa PailloPas encore d'évaluation
- Portafolio EDDocument54 pagesPortafolio ED6ct4qhxyb9Pas encore d'évaluation
- Modelado Clase 3Document11 pagesModelado Clase 3Alejo Martinez SuárezPas encore d'évaluation
- Resumen Metodos EdoDocument3 pagesResumen Metodos EdolpisitelloPas encore d'évaluation
- Unidad No 2 Clase XivDocument4 pagesUnidad No 2 Clase XivAlex 648Pas encore d'évaluation
- Modulo Ecuaciones DiferencialesDocument87 pagesModulo Ecuaciones Diferencialescamilo7983Pas encore d'évaluation
- Cierre y DespedidaDocument4 pagesCierre y DespedidaGustavoPas encore d'évaluation