Vous aimerez peut-être aussi
- Team Mate+AM+IT+Overview+12Document41 pagesTeam Mate+AM+IT+Overview+12epajueloPas encore d'évaluation
- Book ListDocument6 pagesBook Listdebasishmee58080% (1)
- Wind LoadDocument1 pageWind Loadvikramjain66Pas encore d'évaluation
- Troubleshooting: Fully Automated Urine Particle AnalyzerDocument108 pagesTroubleshooting: Fully Automated Urine Particle Analyzerjw lPas encore d'évaluation
- CFM56-5A-5B CO-063 Basic Engine Feb2014Document27 pagesCFM56-5A-5B CO-063 Basic Engine Feb2014Kelik Arif100% (1)
- McbcomDocument72 pagesMcbcomopenjavier5208Pas encore d'évaluation
- Fdocuments - in Companies List With Contact DetailsDocument80 pagesFdocuments - in Companies List With Contact DetailsNaren RawatPas encore d'évaluation
- Kalman Filtering Over Gilbert-Elliott Channels: Stability Conditions and Critical CurveDocument15 pagesKalman Filtering Over Gilbert-Elliott Channels: Stability Conditions and Critical CurvenablakPas encore d'évaluation
- Kalman Oh YeahDocument21 pagesKalman Oh YeahmarriedmanvnPas encore d'évaluation
- Anomaly Detection and Attribution in Networks With Temporally Correlated TrafficDocument12 pagesAnomaly Detection and Attribution in Networks With Temporally Correlated TrafficVamsi ReddyPas encore d'évaluation
- H Filtering For T-S Fuzzy Networked Systems With Stochastic Multiple Delays and Sensor FaultsDocument29 pagesH Filtering For T-S Fuzzy Networked Systems With Stochastic Multiple Delays and Sensor FaultsBharathPas encore d'évaluation
- InglesDocument10 pagesInglesyensiPas encore d'évaluation
- Multi-Sensor Kalman Filtering With Intermittent MeasurementsDocument8 pagesMulti-Sensor Kalman Filtering With Intermittent MeasurementsShrija KarmakarPas encore d'évaluation
- Gradient RSSI Filter and Predictor For Wireless Networks Algorithms and ProtocolsDocument26 pagesGradient RSSI Filter and Predictor For Wireless Networks Algorithms and ProtocolsLuis-Patricia MillanPas encore d'évaluation
- State Feedback Controller Design of Networked Control SystemsDocument5 pagesState Feedback Controller Design of Networked Control SystemsPaulina MarquezPas encore d'évaluation
- Modeling and Evaluation of Wireless Sensor Network Protocols by Stochastic Timed AutomataDocument17 pagesModeling and Evaluation of Wireless Sensor Network Protocols by Stochastic Timed AutomataRaka Satria PradanaPas encore d'évaluation
- 2986 (Martin) - 1Document25 pages2986 (Martin) - 1Harsha KolarPas encore d'évaluation
- Data Transmission Over Networks For Estimation: V. Gupta, A. F. Dana, J. P. Hespanha and R. M. MurrayDocument8 pagesData Transmission Over Networks For Estimation: V. Gupta, A. F. Dana, J. P. Hespanha and R. M. MurrayMarcoHelgoftRicartiPas encore d'évaluation
- Optimal Fusion Estimation With Multi-Step Random DDocument18 pagesOptimal Fusion Estimation With Multi-Step Random DsumathyPas encore d'évaluation
- Networked Control SystemsDocument2 pagesNetworked Control SystemsWalid AlFuhaidPas encore d'évaluation
- Storace (2004) - Piecewise-Linear Approximation of Nonlinear Dynamical SystemsDocument13 pagesStorace (2004) - Piecewise-Linear Approximation of Nonlinear Dynamical SystemsSohibul HajahPas encore d'évaluation
- LQG Control With Missing Observations and Control PacketsDocument6 pagesLQG Control With Missing Observations and Control PacketsShrija KarmakarPas encore d'évaluation
- Kaj TaqquDocument43 pagesKaj TaqqucocoyetacocoPas encore d'évaluation
- Estimation of Blocking Probabilities in A Cellular Network Which Is Prone To Dynamic LossesDocument8 pagesEstimation of Blocking Probabilities in A Cellular Network Which Is Prone To Dynamic Lossessurendiran123Pas encore d'évaluation
- 15.10 Off-Line DSA: 2006 by Taylor & Francis Group, LLCDocument4 pages15.10 Off-Line DSA: 2006 by Taylor & Francis Group, LLCfirst lastPas encore d'évaluation
- Quality Reliability Eng - 2018 - Li - A Wavelet Based Nonparametric CUSUM Control Chart For Autocorrelated Processes WithDocument15 pagesQuality Reliability Eng - 2018 - Li - A Wavelet Based Nonparametric CUSUM Control Chart For Autocorrelated Processes WithFelipe OliveiraPas encore d'évaluation
- Abstracts MonteCarloMethodsDocument4 pagesAbstracts MonteCarloMethodslib_01Pas encore d'évaluation
- A Study of Robust Active Queue Management Schemes For Correlated TrafficDocument11 pagesA Study of Robust Active Queue Management Schemes For Correlated Trafficnithya_narmiPas encore d'évaluation
- (Deception) Sensor Our WRKDocument27 pages(Deception) Sensor Our WRKBharathPas encore d'évaluation
- Static Sensitization MethodsDocument12 pagesStatic Sensitization MethodskushalbrsPas encore d'évaluation
- A Blind Approach To HammersteinDocument10 pagesA Blind Approach To HammersteinminhtrieudoddtPas encore d'évaluation
- Dynamical Behavior of Rate-Base D Flow Control Mechanisms: Jean-Chrysostome Bolo T A - Udaya Shankar2Document15 pagesDynamical Behavior of Rate-Base D Flow Control Mechanisms: Jean-Chrysostome Bolo T A - Udaya Shankar2Sanjiti BhargavaPas encore d'évaluation
- Signal Processing: R. Caballero-Águila, A. Hermoso-Carazo, J. Linares-PérezDocument11 pagesSignal Processing: R. Caballero-Águila, A. Hermoso-Carazo, J. Linares-PérezSamuel EUPas encore d'évaluation
- Hybrid Physics-Based and Data-Driven PHM: H. Hanachi, W. Yu, I.Y. Kim and C.K. MechefskeDocument13 pagesHybrid Physics-Based and Data-Driven PHM: H. Hanachi, W. Yu, I.Y. Kim and C.K. MechefskeSudipto RayPas encore d'évaluation
- Systems With Finite Communication Bandwidth Constraints-Part I: State Estimation ProblemsDocument6 pagesSystems With Finite Communication Bandwidth Constraints-Part I: State Estimation ProblemsAbdurahim AbrahimPas encore d'évaluation
- Self-Optimized Routing Protocol For Wireless Sensor NetworksDocument4 pagesSelf-Optimized Routing Protocol For Wireless Sensor NetworksvinoaspsPas encore d'évaluation
- Channel Estimation For Opportunistic Spectrum Access: Uniform and Random SensingDocument32 pagesChannel Estimation For Opportunistic Spectrum Access: Uniform and Random Sensinghshokri70Pas encore d'évaluation
- 4 PDFDocument25 pages4 PDFĚlîâȟ Gṫȓ GûângûlPas encore d'évaluation
- Real-Time Feedback Control of Computer Networks Based On Predicted State EstimationDocument27 pagesReal-Time Feedback Control of Computer Networks Based On Predicted State Estimationbavar88Pas encore d'évaluation
- Articulo SampleDocument16 pagesArticulo SamplePaulina MarquezPas encore d'évaluation
- A State-Space Approach To Multiuser Parameters Estimation Using Central Difference Filter For CDMA SystemsDocument22 pagesA State-Space Approach To Multiuser Parameters Estimation Using Central Difference Filter For CDMA SystemsCường Sống ThiệnPas encore d'évaluation
- Contention Modeling Icmn1Document17 pagesContention Modeling Icmn1ieeexploreprojectsPas encore d'évaluation
- Approximation of Large-Scale Dynamical Systems: An Overview: A.C. Antoulas and D.C. Sorensen August 31, 2001Document22 pagesApproximation of Large-Scale Dynamical Systems: An Overview: A.C. Antoulas and D.C. Sorensen August 31, 2001Anonymous lEBdswQXmxPas encore d'évaluation
- SFB637 A5 10 014 IcDocument8 pagesSFB637 A5 10 014 IcSummrina KanwalPas encore d'évaluation
- Gaussian Process-Based Predictive ControDocument12 pagesGaussian Process-Based Predictive ContronhatvpPas encore d'évaluation
- Chapter 8Document1 pageChapter 8Bharanidharan RaviPas encore d'évaluation
- Boaz Patt-Shamir Sergio Rajsbaum: Boaz@theory - Lcs.mit - Edu. Rajsbaum@theory - Lcs.mit - EduDocument10 pagesBoaz Patt-Shamir Sergio Rajsbaum: Boaz@theory - Lcs.mit - Edu. Rajsbaum@theory - Lcs.mit - Eduprasannakumar_rajaPas encore d'évaluation
- Department of Electrical Engineering and Computer Sciences University of California at Berkeley (Sinopoli, Lusche, Massimof, Poolla, Sastry) @eecs - Berkeley.eduDocument8 pagesDepartment of Electrical Engineering and Computer Sciences University of California at Berkeley (Sinopoli, Lusche, Massimof, Poolla, Sastry) @eecs - Berkeley.eduCarla Andrea Vera FuentesPas encore d'évaluation
- Surrogate Models For Oscillatory Systems Using Sparse Polynomial Chaos Expansions and Stochastic Time WarpingDocument45 pagesSurrogate Models For Oscillatory Systems Using Sparse Polynomial Chaos Expansions and Stochastic Time Warpingpatricia.santanareyesPas encore d'évaluation
- Protocols Can Make Traffic Appear Self-Similar Jon M. Peha: Carnegie Mellon UniversityDocument14 pagesProtocols Can Make Traffic Appear Self-Similar Jon M. Peha: Carnegie Mellon Universityebich87Pas encore d'évaluation
- Alman Filter Based Ongestion Ontroller: Mehdi MohtashamzadehDocument10 pagesAlman Filter Based Ongestion Ontroller: Mehdi MohtashamzadehijdpsPas encore d'évaluation
- Kf-Power IEEE 2003Document11 pagesKf-Power IEEE 2003Srikantan KcPas encore d'évaluation
- Adaptive Counting Rule For Cooperative Spectrum Sensing Under Correlated EnvironmentsDocument14 pagesAdaptive Counting Rule For Cooperative Spectrum Sensing Under Correlated Environmentssuchi87Pas encore d'évaluation
- Kalman Filter-Based Integrity Monitoring Against Sensor FaultsDocument40 pagesKalman Filter-Based Integrity Monitoring Against Sensor FaultsHaswin PratamaPas encore d'évaluation
- Extended Dissipative Sliding Mode Control For Nonlinear Networked Control Systems Via Event-Triggered Mechanism With Random Uncertain MeasurementDocument16 pagesExtended Dissipative Sliding Mode Control For Nonlinear Networked Control Systems Via Event-Triggered Mechanism With Random Uncertain MeasurementBharathPas encore d'évaluation
- Eective Bandwidth and Fast Simulation of ATM Intree NetworksDocument26 pagesEective Bandwidth and Fast Simulation of ATM Intree NetworksGaurav BanerjeePas encore d'évaluation
- Traffic SimultaionDocument12 pagesTraffic SimultaionYessyPas encore d'évaluation
- Lecture Notes On Stochastic Networks - Kelly - Yudovina PDFDocument230 pagesLecture Notes On Stochastic Networks - Kelly - Yudovina PDFNatalia Clivio VelillaPas encore d'évaluation
- Sim2 RD11Document12 pagesSim2 RD11tybscstatPas encore d'évaluation
- A Macsyma/Expert System For Nonlinear Filtering: G.L. Blankenshlp, T A. Lavlgna, T D.C. Macenany, T YantDocument2 pagesA Macsyma/Expert System For Nonlinear Filtering: G.L. Blankenshlp, T A. Lavlgna, T D.C. Macenany, T YantSubhashree MohantyPas encore d'évaluation
- Vedula Xu 2009Document13 pagesVedula Xu 2009Vladimir VelascoPas encore d'évaluation
- Synchronization and Transient Stability in Power Networks and Non-Uniform Kuramoto OscillatorsDocument8 pagesSynchronization and Transient Stability in Power Networks and Non-Uniform Kuramoto OscillatorsJigar PatelPas encore d'évaluation
- Computationally Efficient Methods For Estimating Unknown Input Forces On Structural SystemsDocument8 pagesComputationally Efficient Methods For Estimating Unknown Input Forces On Structural SystemsTestPas encore d'évaluation
- Passivity Enforcement Via Perturbation of Hamiltonian MatricesDocument15 pagesPassivity Enforcement Via Perturbation of Hamiltonian MatricesIoan TudosaPas encore d'évaluation
- Modeling Congested Internet Connections: Fer.) We Also Assume That The Path Is Fixed, The Transfer IsDocument6 pagesModeling Congested Internet Connections: Fer.) We Also Assume That The Path Is Fixed, The Transfer IsLilika BandeiraPas encore d'évaluation
- Hai Lin, G. Zhai, P. J. Antsaklis 2003 Robust Stability and Disturbance Attenuation Analysis of A Class of Networked Control SystemsDocument6 pagesHai Lin, G. Zhai, P. J. Antsaklis 2003 Robust Stability and Disturbance Attenuation Analysis of A Class of Networked Control SystemsFelix GamarraPas encore d'évaluation
- nRF24L01P Product Specification 1 0Document78 pagesnRF24L01P Product Specification 1 0CaelumBlimpPas encore d'évaluation
- RID 1 ModrobDocument4 pagesRID 1 ModrobbalakaleesPas encore d'évaluation
- Adjunct 2Document5 pagesAdjunct 2debasishmee5808Pas encore d'évaluation
- Extramural Funding2012-13Document2 pagesExtramural Funding2012-13debasishmee5808Pas encore d'évaluation
- TrademarksDocument1 pageTrademarksDhyan SwaroopPas encore d'évaluation
- RID 1 ModrobDocument6 pagesRID 1 Modrobdebasishmee5808Pas encore d'évaluation
- Bhimbra-Generalized Theory Electrical MachinesDocument10 pagesBhimbra-Generalized Theory Electrical Machinesdebasishmee5808Pas encore d'évaluation
- 10 1109@91 481843Document12 pages10 1109@91 481843debasishmee5808Pas encore d'évaluation
- Control SystemDocument22 pagesControl SystemKamran RazaPas encore d'évaluation
- AssignmentsDocument11 pagesAssignmentsdebasishmee5808Pas encore d'évaluation
- Adaptive Control of Linearizable Systems: Fully-StateDocument9 pagesAdaptive Control of Linearizable Systems: Fully-Statedebasishmee5808Pas encore d'évaluation
- Sophus 3Document1 pageSophus 3debasishmee5808Pas encore d'évaluation
- Electromagnetic Field TheoryDocument3 pagesElectromagnetic Field Theorydebasishmee5808Pas encore d'évaluation
- T Year B.tech Sylla1sbus Revised 18.08.10Document33 pagesT Year B.tech Sylla1sbus Revised 18.08.10Manoj KarmakarPas encore d'évaluation
- Lec 1Document18 pagesLec 1cavanzasPas encore d'évaluation
- AssignmentsDocument11 pagesAssignmentsdebasishmee5808Pas encore d'évaluation
- Duplicate Doc Diploma CertiDocument1 pageDuplicate Doc Diploma Certidebasishmee5808Pas encore d'évaluation
- Control System - I: Weekly Lesson PlanDocument5 pagesControl System - I: Weekly Lesson Plandebasishmee5808Pas encore d'évaluation
- 2 14 24Document11 pages2 14 24debasishmee5808Pas encore d'évaluation
- Introduction To Nba 16 NovDocument32 pagesIntroduction To Nba 16 Novdebasishmee5808Pas encore d'évaluation
- Lec 2Document25 pagesLec 2debasishmee5808Pas encore d'évaluation
- Best Practices of Report Writing Based On Study of Reports: Venue: India Habitat Centre, New DelhiDocument24 pagesBest Practices of Report Writing Based On Study of Reports: Venue: India Habitat Centre, New Delhidebasishmee5808Pas encore d'évaluation
- Graphical AbstractDocument2 pagesGraphical Abstractdebasishmee5808Pas encore d'évaluation
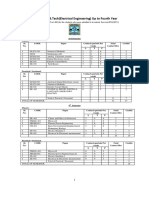
- Syllabus For B.Tech (Electrical Engineering) Up To Fourth YearDocument67 pagesSyllabus For B.Tech (Electrical Engineering) Up To Fourth YearDr. Kaushik MandalPas encore d'évaluation
- Lec 1Document18 pagesLec 1cavanzasPas encore d'évaluation
- Lec 2Document25 pagesLec 2debasishmee5808Pas encore d'évaluation
- Time ManagementDocument19 pagesTime ManagementShyam_Nair_9667Pas encore d'évaluation
- Comparison Between Integer Order and Fractional Order ControllersDocument6 pagesComparison Between Integer Order and Fractional Order Controllersdebasishmee5808Pas encore d'évaluation
- 01 - Motor Protection Circuit Breakers - 01 - 20 PDFDocument20 pages01 - Motor Protection Circuit Breakers - 01 - 20 PDFMostafa ShannaPas encore d'évaluation
- PAYG Price Guide 180518Document21 pagesPAYG Price Guide 180518Jan JanPas encore d'évaluation
- Deep Sea Research Submarine Report PDFDocument128 pagesDeep Sea Research Submarine Report PDFy_596688032Pas encore d'évaluation
- Altman Fall Winter 2012 Product Showcase FlyerDocument32 pagesAltman Fall Winter 2012 Product Showcase FlyerИлия ГеоргиевPas encore d'évaluation
- 7810-8110-Ca-1540-651-001 - HP FG KodDocument68 pages7810-8110-Ca-1540-651-001 - HP FG Kodgopal krishnan0% (1)
- Kinematics of MachinesDocument2 pagesKinematics of MachinesBhavesh J MakwanaPas encore d'évaluation
- Tabla 1-1 (W Shapes)Document17 pagesTabla 1-1 (W Shapes)Leonardo ZambranoPas encore d'évaluation
- PDFDocument2 pagesPDFSalim AshorPas encore d'évaluation
- DataDocument85 pagesDataMyk Twentytwenty NBeyond100% (1)
- BTICINO Catalog Matix PDFDocument80 pagesBTICINO Catalog Matix PDFsokolobanPas encore d'évaluation
- Behringer FX2000-Product InfoDocument10 pagesBehringer FX2000-Product Infogotti45Pas encore d'évaluation
- Needle en b275-293Document19 pagesNeedle en b275-293ajeeshsbabuPas encore d'évaluation
- ASTM D1265-11 Muestreo de Gases Método ManualDocument5 pagesASTM D1265-11 Muestreo de Gases Método ManualDiana Alejandra Castañón IniestraPas encore d'évaluation
- Doppler NavigationDocument21 pagesDoppler NavigationRe-ownRe-ve100% (3)
- Mechanical and Micro Structure of MDF Processed MaterialDocument8 pagesMechanical and Micro Structure of MDF Processed MaterialSharath P CPas encore d'évaluation
- AN3785 MAX3421E Programming Guide PDFDocument63 pagesAN3785 MAX3421E Programming Guide PDFtaccituaPas encore d'évaluation
- UAV Compare & RecommendationDocument1 pageUAV Compare & RecommendationWafa PutraPas encore d'évaluation
- (L4) - (JLD 3.0) - Semiconductors - 30th DecDocument66 pages(L4) - (JLD 3.0) - Semiconductors - 30th DecAshfaq khanPas encore d'évaluation
- Performance of Trinidad Gas Reservoirs PDFDocument11 pagesPerformance of Trinidad Gas Reservoirs PDFMarcus ChanPas encore d'évaluation
- Lexium Motion Control 200401Document130 pagesLexium Motion Control 200401Mohamed Elsayed HasanPas encore d'évaluation
- EV 10 Best Practice - Implementing Enterprise Vault On VMware (January 2012)Document31 pagesEV 10 Best Practice - Implementing Enterprise Vault On VMware (January 2012)TekkiePas encore d'évaluation
- Assessment PlanDocument2 pagesAssessment Planapi-282348214Pas encore d'évaluation
- Vladimir Lopez Stem Teacher ResumeDocument1 pageVladimir Lopez Stem Teacher Resumeapi-325782374Pas encore d'évaluation
- Alcoa Lock Bolt PDFDocument8 pagesAlcoa Lock Bolt PDFMurugan PalanisamyPas encore d'évaluation