Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Gauge 032017Document92 pagesGauge 032017PCezzzPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Auto Express - March 8 2017Document84 pagesAuto Express - March 8 2017PCezzzPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- FS2014 Event Guide WEBDocument96 pagesFS2014 Event Guide WEBPCezzzPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- Influence of Dynamic Unbalance of Wheelsets On The Dynamic Performance of High-Speed CarsDocument7 pagesInfluence of Dynamic Unbalance of Wheelsets On The Dynamic Performance of High-Speed CarsPCezzzPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Steering System & Suspension Design For 2005 Formula SAE-A Racer CarDocument133 pagesSteering System & Suspension Design For 2005 Formula SAE-A Racer CarPrihastyaWishnutamaPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- S e N S o R S & T R A N S D U C e R SDocument6 pagesS e N S o R S & T R A N S D U C e R SPCezzzPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Improving Vehicle Handling Behaviour With Active Toe-ControlDocument100 pagesImproving Vehicle Handling Behaviour With Active Toe-ControlPCezzzPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
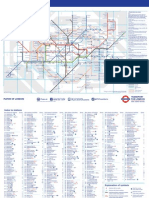
- Standard Tube MapDocument2 pagesStandard Tube Mapapi-248839578Pas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Hydraulic Power Steering DesignDocument127 pagesHydraulic Power Steering DesignKart01Pas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- 626537Document43 pages626537Ruth BuscombePas encore d'évaluation
- Simulating Wheel Wear Using Semi-Hertzian MethodDocument7 pagesSimulating Wheel Wear Using Semi-Hertzian MethodPCezzzPas encore d'évaluation
- SAE - Design of A Suspension For A CarDocument74 pagesSAE - Design of A Suspension For A CarEnrique Balam100% (3)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Active Control of Narrow Tilting Vehicle DynamicsDocument197 pagesActive Control of Narrow Tilting Vehicle DynamicsPCezzzPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- S e N S o R S & T R A N S D U C e R SDocument6 pagesS e N S o R S & T R A N S D U C e R SPCezzzPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- 2012 O'neillmscrDocument208 pages2012 O'neillmscrPCezzzPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- F de 85 Be 132000000Document5 pagesF de 85 Be 132000000PCezzzPas encore d'évaluation
- Art. Ackermann Bunte2Document6 pagesArt. Ackermann Bunte2ENIC-AITCGPas encore d'évaluation
- PHD Thesis 640529Document234 pagesPHD Thesis 640529PCezzzPas encore d'évaluation
- Tyre ModelsDocument35 pagesTyre ModelsPCezzzPas encore d'évaluation
- How Many Words Should Each Section of A 10000 Word Business Dissertation Be - Yahoo AnswersDocument2 pagesHow Many Words Should Each Section of A 10000 Word Business Dissertation Be - Yahoo AnswersPCezzzPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- 10292Document56 pages10292PCezzzPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- Um06 Man Nutz-IlleDocument19 pagesUm06 Man Nutz-IllePCezzzPas encore d'évaluation
- I PD Rollover: United States PatentDocument65 pagesI PD Rollover: United States PatentPCezzzPas encore d'évaluation
- Electric Rear Wheel Steering ActuatorDocument10 pagesElectric Rear Wheel Steering ActuatorPCezzzPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Advanced Yaw Control of Four-Wheeled Vehicles Via Rear Active Differential BrakingDocument6 pagesAdvanced Yaw Control of Four-Wheeled Vehicles Via Rear Active Differential BrakingPCezzzPas encore d'évaluation
- Turbocharger Failure Analysis 3-09Document21 pagesTurbocharger Failure Analysis 3-09PCezzzPas encore d'évaluation
- Formula Student FlyerDocument2 pagesFormula Student FlyerPCezzzPas encore d'évaluation
- Predictive Active Steering Control For Autonomous Vehicle SystemsDocument14 pagesPredictive Active Steering Control For Autonomous Vehicle Systemsjiugarte1Pas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- On The Static Solutions in Gravity With Massive Scalar Field in Three DimensionsDocument11 pagesOn The Static Solutions in Gravity With Massive Scalar Field in Three DimensionsMojeime Igor NowakPas encore d'évaluation
- Notes On The Site That Takes CalculationsDocument7 pagesNotes On The Site That Takes CalculationsNurdin ŠabićPas encore d'évaluation
- Sensex 1Document354 pagesSensex 1raghav4life8724Pas encore d'évaluation
- Solving Problems by Searching: Artificial IntelligenceDocument43 pagesSolving Problems by Searching: Artificial IntelligenceDai TrongPas encore d'évaluation
- Renormalization Made Easy, BaezDocument11 pagesRenormalization Made Easy, BaezdbranetensionPas encore d'évaluation
- Simulation of A Tank Fill by Volume of Fluid Method Using Ansys Fluent - Training, Projects & Research CenterDocument9 pagesSimulation of A Tank Fill by Volume of Fluid Method Using Ansys Fluent - Training, Projects & Research CenterHayderAlSamawiPas encore d'évaluation
- PaperchinaDocument10 pagesPaperchinaRAM KUMARPas encore d'évaluation
- Mastering Sequences & SeriesDocument2 pagesMastering Sequences & SeriesCristina CotraPas encore d'évaluation
- Factorials Permutations and Combinations Answer KeyDocument4 pagesFactorials Permutations and Combinations Answer KeyAlrian Jay SampalayPas encore d'évaluation
- Understandable Statistics Concepts and Methods 12th EditionDocument61 pagesUnderstandable Statistics Concepts and Methods 12th Editionherbert.porter697100% (36)
- Chapter 8 - Probability SolutionsDocument24 pagesChapter 8 - Probability SolutionsDumoraSimbolonPas encore d'évaluation
- Fatigue Analysis in Ansys WorkbenchDocument14 pagesFatigue Analysis in Ansys WorkbenchAshokkumar VellorePas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Etabs NotesDocument11 pagesEtabs Noteskarimunnisa sheikPas encore d'évaluation
- Urriculum Itae Et TudiorumDocument21 pagesUrriculum Itae Et TudiorumEnricoPas encore d'évaluation
- Transformation of Plane StressDocument27 pagesTransformation of Plane StressDave Harrison FloresPas encore d'évaluation
- Math 9Document8 pagesMath 9Erich GallardoPas encore d'évaluation
- Optimizing Planetary Gear Design for Load DistributionDocument17 pagesOptimizing Planetary Gear Design for Load DistributionANURAAG AAYUSHPas encore d'évaluation
- No SystemDocument15 pagesNo SystemAjeet Singh RachhoyaPas encore d'évaluation
- ECON 233-Introduction To Game Theory - Husnain Fateh AhmadDocument7 pagesECON 233-Introduction To Game Theory - Husnain Fateh AhmadAdeel ShaikhPas encore d'évaluation
- Engg Mechanics QuestionnaireDocument15 pagesEngg Mechanics Questionnaireacurvz2005Pas encore d'évaluation
- Kindergarten 2D and 3D Shapes PDFDocument33 pagesKindergarten 2D and 3D Shapes PDFAibegim Abdyldabekova100% (1)
- TEST 1. TrigonometryDocument2 pagesTEST 1. TrigonometrySonia AroraPas encore d'évaluation
- Trigonometry Worksheet with 15 ProblemsDocument2 pagesTrigonometry Worksheet with 15 ProblemsChandrasegran NargesPas encore d'évaluation
- The Gran Plot 8Document5 pagesThe Gran Plot 8Yasmim YamaguchiPas encore d'évaluation
- The 3-Rainbow Index of GraphsDocument28 pagesThe 3-Rainbow Index of GraphsDinda KartikaPas encore d'évaluation
- Table of Common Laplace TransformsDocument2 pagesTable of Common Laplace TransformsJohn Carlo SacramentoPas encore d'évaluation
- K Means QuestionsDocument2 pagesK Means QuestionsShakeeb ParwezPas encore d'évaluation
- Calculate stock indices and returnsDocument5 pagesCalculate stock indices and returnsSiddhant AggarwalPas encore d'évaluation
- Essentials of Chemical Reaction Engineering 1st Edition Fogler Solutions ManualDocument35 pagesEssentials of Chemical Reaction Engineering 1st Edition Fogler Solutions Manualnancycarrollaocprizwen100% (11)
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityD'EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityÉvaluation : 5 sur 5 étoiles5/5 (1)
- Algorithms to Live By: The Computer Science of Human DecisionsD'EverandAlgorithms to Live By: The Computer Science of Human DecisionsÉvaluation : 4.5 sur 5 étoiles4.5/5 (722)
- 8-Bit Apocalypse: The Untold Story of Atari's Missile CommandD'Everand8-Bit Apocalypse: The Untold Story of Atari's Missile CommandÉvaluation : 3.5 sur 5 étoiles3.5/5 (10)
- Generative AI: The Insights You Need from Harvard Business ReviewD'EverandGenerative AI: The Insights You Need from Harvard Business ReviewÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessD'EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessPas encore d'évaluation
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveD'EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurvePas encore d'évaluation