Vous aimerez peut-être aussi
- IDDQ Failure Diagnosis Is Here: Ron PressDocument2 pagesIDDQ Failure Diagnosis Is Here: Ron Pressthangaraj_icPas encore d'évaluation
- Thirumanthirambook 1Document39 pagesThirumanthirambook 1jeyankarunanithiPas encore d'évaluation
- An 345Document4 pagesAn 345thangaraj_icPas encore d'évaluation
- 75 How To Stop Worrying and Start Living PDFDocument6 pages75 How To Stop Worrying and Start Living PDFFelimon Megerssa100% (2)
- Atmel 2521 AVR Hardware Design Considerations ApplicationNote AVR042Document21 pagesAtmel 2521 AVR Hardware Design Considerations ApplicationNote AVR042thangaraj_icPas encore d'évaluation
- ) $$1 - ADE %ASY: #-/3) $$1 4EST - ETHODOLOGY &undamental #OnceptsDocument32 pages) $$1 - ADE %ASY: #-/3) $$1 4EST - ETHODOLOGY &undamental #OnceptsSainadh YerrapragadaPas encore d'évaluation
- 2602 - Basics of Multiplexers 2 - SlidesDocument10 pages2602 - Basics of Multiplexers 2 - Slidesthangaraj_icPas encore d'évaluation
- Layout Design GuideDocument41 pagesLayout Design Guidethangaraj_icPas encore d'évaluation
- Day3 FLEXDocument49 pagesDay3 FLEXthangaraj_ic100% (1)
- App 119Document19 pagesApp 119thangaraj_icPas encore d'évaluation
- Analog Layout and Grounding TechniquesDocument7 pagesAnalog Layout and Grounding TechniquesSijo XaviarPas encore d'évaluation
- App 114Document17 pagesApp 114thangaraj_icPas encore d'évaluation
- e2e.ti.comDocument3 pagese2e.ti.comthangaraj_icPas encore d'évaluation
- Adc DNL INLDocument5 pagesAdc DNL INLNabil IshamPas encore d'évaluation
- EMC and NoiseDocument47 pagesEMC and Noisethangaraj_icPas encore d'évaluation
- WWW Planetanalog Com DifferentialSignaling 1Document5 pagesWWW Planetanalog Com DifferentialSignaling 1thangaraj_icPas encore d'évaluation
- Bhaja Govindam in TamilDocument6 pagesBhaja Govindam in Tamilthangaraj_icPas encore d'évaluation
- Getting The Best Out of Your Precision Design With Zero Drift Amplifiers Part 2Document7 pagesGetting The Best Out of Your Precision Design With Zero Drift Amplifiers Part 2thangaraj_icPas encore d'évaluation
- 12b.iep Activity1 2013Document28 pages12b.iep Activity1 2013demos2011Pas encore d'évaluation
- WWW Planetanalog Com CurrentsenseDocument6 pagesWWW Planetanalog Com Currentsensethangaraj_icPas encore d'évaluation
- P 1779Document4 pagesP 1779thangaraj_icPas encore d'évaluation
- AppendixDocument23 pagesAppendixthangaraj_icPas encore d'évaluation
- Embeddedgurus ComDocument5 pagesEmbeddedgurus Comthangaraj_icPas encore d'évaluation
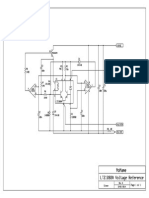
- LTZ Ref BoardDocument1 pageLTZ Ref Boardthangaraj_icPas encore d'évaluation
- Hybrid PCB Stack Up GuideDocument13 pagesHybrid PCB Stack Up Guidethangaraj_icPas encore d'évaluation
- Subsection 4 4 1Document6 pagesSubsection 4 4 1thangaraj_icPas encore d'évaluation
- PCBStackups (Ott)Document18 pagesPCBStackups (Ott)krishnamohankola321Pas encore d'évaluation
- Tech Note 107Document4 pagesTech Note 107thangaraj_icPas encore d'évaluation
- Instrumentation AmplifierDocument6 pagesInstrumentation Amplifierilg1Pas encore d'évaluation
- Agarwal A., Lang J. - Foundations of Analog and Digital Electronic Circuits - Supplemental Sections and Examples - 2005Document136 pagesAgarwal A., Lang J. - Foundations of Analog and Digital Electronic Circuits - Supplemental Sections and Examples - 2005შაქრო ტრუბეცკოიPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- HO 4T Job Design Work MeasurementDocument8 pagesHO 4T Job Design Work Measurementjohnmia20100% (1)
- Mormon Doctrine (Bruce R McConkie)Document304 pagesMormon Doctrine (Bruce R McConkie)Zuleica Oliveira83% (6)
- MythologyDocument9 pagesMythologyrensebastianPas encore d'évaluation
- Trustworthiness and Integrity in Qualitative ResearchDocument25 pagesTrustworthiness and Integrity in Qualitative ResearchcrossPas encore d'évaluation
- Chapter 2013 Multivariate Statistical Analysis IDocument36 pagesChapter 2013 Multivariate Statistical Analysis IShiera Mae Labial LangePas encore d'évaluation
- The Portrait of A Lady - NotesDocument5 pagesThe Portrait of A Lady - NotesQudsiyah AdvaniPas encore d'évaluation
- Commit30 - Goal Getting GuideDocument4 pagesCommit30 - Goal Getting GuidePongnateePas encore d'évaluation
- Yuli - The Holy BookDocument38 pagesYuli - The Holy BookSese Seko100% (1)
- Word List 3: Advanced Vocabulary DevelopmentDocument5 pagesWord List 3: Advanced Vocabulary DevelopmentAbeera AhmadPas encore d'évaluation
- BaZi Basico PDFDocument54 pagesBaZi Basico PDFMelnicof DanyPas encore d'évaluation
- Research Methods ProjectDocument28 pagesResearch Methods Projectmahua100% (1)
- Lecture 20 RobocupDocument17 pagesLecture 20 RobocupKartika MunirPas encore d'évaluation
- The Duchess of Malfi Essay - Critical Essays: John WebsterDocument10 pagesThe Duchess of Malfi Essay - Critical Essays: John WebstershiivanPas encore d'évaluation
- Optical Properties of Isotropic MineralsDocument6 pagesOptical Properties of Isotropic MineralsFadlin IdrusPas encore d'évaluation
- The Adventist Movement Its Relationship To The Seventh Day Church of God PDFDocument54 pagesThe Adventist Movement Its Relationship To The Seventh Day Church of God PDFCraig MartinPas encore d'évaluation
- GR Exemplar LessonDocument2 pagesGR Exemplar LessonJoaquin100% (4)
- 12 Principles in 3D AnimationDocument4 pages12 Principles in 3D AnimationfurrypdfPas encore d'évaluation
- Essential RightDocument42 pagesEssential Righthamada3747Pas encore d'évaluation
- Jack Canfield SuccessDocument49 pagesJack Canfield Successknfzed100% (1)
- 【Kwame Nkrumah】ConsciencismDocument65 pages【Kwame Nkrumah】ConsciencismAlainzhu100% (5)
- Goethe Elective Affinities TextDocument4 pagesGoethe Elective Affinities TextAaronPas encore d'évaluation
- 150+ New World Order Globalist Agenda QuotesDocument59 pages150+ New World Order Globalist Agenda Quoteskitty katPas encore d'évaluation
- Strategy and Tactics of Distributive BargainingDocument58 pagesStrategy and Tactics of Distributive BargainingAnh BVPas encore d'évaluation
- (Akira Takayama) Analytical Methods in EconomicsDocument693 pages(Akira Takayama) Analytical Methods in EconomicsCarla Valverde España100% (4)
- New Creation Image - Knowing Who You Are in ChristDocument117 pagesNew Creation Image - Knowing Who You Are in ChristDr. A.L. and Joyce GillPas encore d'évaluation
- LTS 1 Course Description (Draft)Document1 pageLTS 1 Course Description (Draft)Michael ManahanPas encore d'évaluation
- Portfolio IntroductionDocument3 pagesPortfolio Introductionapi-272102596Pas encore d'évaluation
- Kindergarten Science Lesson WormsDocument3 pagesKindergarten Science Lesson Wormsapi-402679147Pas encore d'évaluation
- Reading DiagnosticDocument4 pagesReading DiagnosticDanika BarkerPas encore d'évaluation
- Davao Wisdom Academy: Argie Baluyot Louie Jay Abarquez Marymae BrazaDocument5 pagesDavao Wisdom Academy: Argie Baluyot Louie Jay Abarquez Marymae BrazaLouie Jay Cañada AbarquezPas encore d'évaluation