Vous aimerez peut-être aussi
- 52 GLTMandDUE (DTA2008)Document22 pages52 GLTMandDUE (DTA2008)guido gentilePas encore d'évaluation
- A Tabu Search Algorithm For The Min-Max K-Chinese Postman ProblemDocument20 pagesA Tabu Search Algorithm For The Min-Max K-Chinese Postman Problempc2010Pas encore d'évaluation
- 52 GLTMandDUE (DTA2008)Document17 pages52 GLTMandDUE (DTA2008)guido gentilePas encore d'évaluation
- A Dynamic Route Guidance System Based On Real Traffic Data 2001 European Journal of Operational ResearchDocument7 pagesA Dynamic Route Guidance System Based On Real Traffic Data 2001 European Journal of Operational ResearchMarcoLuisDoradoPinedaPas encore d'évaluation
- Smooth Path Planning in Constrained Environments: Martin Rufli Dave Ferguson Roland SiegwartDocument6 pagesSmooth Path Planning in Constrained Environments: Martin Rufli Dave Ferguson Roland SiegwartTales MarquesPas encore d'évaluation
- Path Computation For Incoming Interface Multipath Routing: Mérindol Pascal, Pansiot Jean-Jacques, Cateloin StéphaneDocument11 pagesPath Computation For Incoming Interface Multipath Routing: Mérindol Pascal, Pansiot Jean-Jacques, Cateloin Stéphanecrana10Pas encore d'évaluation
- A Randomized Algorithm For Finding A Path Subject To Multiple Qos ConstraintsDocument16 pagesA Randomized Algorithm For Finding A Path Subject To Multiple Qos ConstraintsAbir ChakrabortyPas encore d'évaluation
- Fast Heuristics For Continuous Dynamic Shortest Paths and All-Or-Nothing AssignmentDocument48 pagesFast Heuristics For Continuous Dynamic Shortest Paths and All-Or-Nothing Assignmentguido gentilePas encore d'évaluation
- Route Planning With Flexible Objective FunctionsDocument14 pagesRoute Planning With Flexible Objective Functionsmadan321Pas encore d'évaluation
- Ahmed 2013Document17 pagesAhmed 2013Ho Huu VinhPas encore d'évaluation
- Chapleau 1984Document5 pagesChapleau 1984باديس بن سديرةPas encore d'évaluation
- Final ManuscriptDocument20 pagesFinal ManuscriptDharnish Raja.JPas encore d'évaluation
- Finding The K Shortest Paths: David Eppstein March 31, 1997Document26 pagesFinding The K Shortest Paths: David Eppstein March 31, 1997Phạm Đức MinhPas encore d'évaluation
- Computational Time Reduction in Stream Field Navigation Through Dyna 2022 ArDocument8 pagesComputational Time Reduction in Stream Field Navigation Through Dyna 2022 ArMetro Electronics ScalePas encore d'évaluation
- Vehicle Reidentification Using Inductive Loops in Urban AreaDocument8 pagesVehicle Reidentification Using Inductive Loops in Urban AreaEldar TinjicPas encore d'évaluation
- Time and Space Discretization in Dynamic Traffic Assignment ModelsDocument10 pagesTime and Space Discretization in Dynamic Traffic Assignment Modelsguido gentilePas encore d'évaluation
- TUGAS2 Kusumastuti R 1806243916Document6 pagesTUGAS2 Kusumastuti R 1806243916Kusumastuti Rahmawati (Mbak Kus)Pas encore d'évaluation
- 1 State of The Art in UAV PlanningDocument16 pages1 State of The Art in UAV PlanningchurrtePas encore d'évaluation
- A Mobile Robot Path Planning Using Genetic Algorithm in Static EnvironmentDocument4 pagesA Mobile Robot Path Planning Using Genetic Algorithm in Static EnvironmentMikel NanushiPas encore d'évaluation
- A Global Router Based On A Multicommodity Flow ModelDocument14 pagesA Global Router Based On A Multicommodity Flow ModelmmetlicPas encore d'évaluation
- Manuscript Revised RGDocument24 pagesManuscript Revised RGcyberyogi07Pas encore d'évaluation
- A Review of Global Path Planning Methods For Occupancy Grid Maps Regardless of Obstacle DensityDocument30 pagesA Review of Global Path Planning Methods For Occupancy Grid Maps Regardless of Obstacle DensityAbdessamed BelhadjPas encore d'évaluation
- Using Interpolation To Improve Path Planning: The Field D AlgorithmDocument23 pagesUsing Interpolation To Improve Path Planning: The Field D Algorithmmusicmagic85Pas encore d'évaluation
- Sobre El Cálculo de Caminos Óptimos de Pareto en Ponderado 2020Document12 pagesSobre El Cálculo de Caminos Óptimos de Pareto en Ponderado 2020rafaelrojasmillanPas encore d'évaluation
- Region Division in Logistics Distribution With A Two-Stage Optimization AlgorithmDocument12 pagesRegion Division in Logistics Distribution With A Two-Stage Optimization AlgorithmKarim EL BouyahyiouyPas encore d'évaluation
- Ijcs 2016 0303001 PDFDocument7 pagesIjcs 2016 0303001 PDFeditorinchiefijcsPas encore d'évaluation
- Current Routing Strategies To Adapt The Characteristics: Prof. Ananad L.MothghareDocument2 pagesCurrent Routing Strategies To Adapt The Characteristics: Prof. Ananad L.MothghareInternational Journal of computational Engineering research (IJCER)Pas encore d'évaluation
- Spillback Congestion in Dynamic Traffic Assignment: A Macroscopic Flow Model With Time-Varying BottlenecksDocument53 pagesSpillback Congestion in Dynamic Traffic Assignment: A Macroscopic Flow Model With Time-Varying Bottlenecksguido gentilePas encore d'évaluation
- Chapter 5: ConclusionDocument6 pagesChapter 5: ConclusionMuhammad Danial DanialPas encore d'évaluation
- Dynamic System-Optimal Traffic Assignment Using A State Space Model'Document22 pagesDynamic System-Optimal Traffic Assignment Using A State Space Model'wendersoncsdepPas encore d'évaluation
- Van Etten City-Scale Road Extraction From Satellite Imagery v2 Road Speeds and WACV 2020 PaperDocument10 pagesVan Etten City-Scale Road Extraction From Satellite Imagery v2 Road Speeds and WACV 2020 Paperhenri joel jrPas encore d'évaluation
- Actuators 10 00314 v3Document19 pagesActuators 10 00314 v3Ishwar NiralePas encore d'évaluation
- Field D StarDocument35 pagesField D StarSamgse91Pas encore d'évaluation
- S2 201700035 Fierek Sawicki Ver2Document12 pagesS2 201700035 Fierek Sawicki Ver2Szymon FierekPas encore d'évaluation
- Three Extensions of Tong and Richardsons AlgorithDocument17 pagesThree Extensions of Tong and Richardsons AlgorithnigelPas encore d'évaluation
- Qos For Ad Hoc Networking Based On Multiple Metrics: Bandwidth and DelayDocument4 pagesQos For Ad Hoc Networking Based On Multiple Metrics: Bandwidth and Delayro11sePas encore d'évaluation
- Scalable Exact Visualization of IsocontoursDocument47 pagesScalable Exact Visualization of IsocontourspartyindacityPas encore d'évaluation
- Use Nko 17 Re PlanningDocument8 pagesUse Nko 17 Re Planningageoir goePas encore d'évaluation
- Bandwidth Optimization Through Dynamic Routing in ATM Networks: Genetic Algorithm & Tabu Search ApproachDocument5 pagesBandwidth Optimization Through Dynamic Routing in ATM Networks: Genetic Algorithm & Tabu Search ApproachPrateek BahetiPas encore d'évaluation
- An Implicit Path Enumeration Model and Algorithm For Dynamic Traffic Assignment With Congestion SpillbackDocument17 pagesAn Implicit Path Enumeration Model and Algorithm For Dynamic Traffic Assignment With Congestion Spillbackguido gentilePas encore d'évaluation
- Optimizing Communication Overhead While Reducing Path Length in Beaconless Georouting With Guaranteed Delivery For Wireless Sensor NetworksDocument14 pagesOptimizing Communication Overhead While Reducing Path Length in Beaconless Georouting With Guaranteed Delivery For Wireless Sensor NetworksPriya PriyasPas encore d'évaluation
- Solving Bandwidth-Guaranteed Routing Problem Using Routing DataDocument12 pagesSolving Bandwidth-Guaranteed Routing Problem Using Routing DataAIRCC - IJCNCPas encore d'évaluation
- Ant Colony Optimisation Applied To A 3D Shortest Path ProblemDocument26 pagesAnt Colony Optimisation Applied To A 3D Shortest Path Problemiskon_jskPas encore d'évaluation
- Latex SubmissionDocument6 pagesLatex SubmissionguluPas encore d'évaluation
- Location Planning Approach For Intermodal Terminals in Urban and Suburban Rail TransportDocument11 pagesLocation Planning Approach For Intermodal Terminals in Urban and Suburban Rail TransportIonut AlexandruPas encore d'évaluation
- Impact of Computer Network Routing On Imprecise Tables and Static Vs Dynamic RoutingDocument12 pagesImpact of Computer Network Routing On Imprecise Tables and Static Vs Dynamic RoutingtheijesPas encore d'évaluation
- The Optimization of Logistics Distribution Route Based On Dijkstra's Algorithm and C-W Savings AlgorithmDocument10 pagesThe Optimization of Logistics Distribution Route Based On Dijkstra's Algorithm and C-W Savings AlgorithmShivam GuptaPas encore d'évaluation
- Algeng Workshop Google RoutingDocument11 pagesAlgeng Workshop Google Routingmadan321Pas encore d'évaluation
- Fast and Reliable Obstacle Detection and Segmentation For Cross-Country NavigationDocument9 pagesFast and Reliable Obstacle Detection and Segmentation For Cross-Country NavigationRoger SacchelliPas encore d'évaluation
- Single-Track Train Timetabling With Guaranteed Optimality: Branch-And-Bound Algorithms With Enhanced Lower BoundsDocument22 pagesSingle-Track Train Timetabling With Guaranteed Optimality: Branch-And-Bound Algorithms With Enhanced Lower Boundsjohn brownPas encore d'évaluation
- Graph Theory Algorithms For Mobile Ad Hoc Networks: Informatica 36 (2012) 185-200Document16 pagesGraph Theory Algorithms For Mobile Ad Hoc Networks: Informatica 36 (2012) 185-200Ram KumarPas encore d'évaluation
- Two Algorithms For Minimizing Crosstalk in Two-Layer Channel RoutingDocument11 pagesTwo Algorithms For Minimizing Crosstalk in Two-Layer Channel RoutingInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Optimal Path Planning For Mobile Robot Navigation: Gene Eu Jan, Ki Yin Chang, and Ian ParberryDocument10 pagesOptimal Path Planning For Mobile Robot Navigation: Gene Eu Jan, Ki Yin Chang, and Ian Parberrysaeed khodayganPas encore d'évaluation
- Energies: FPGA Implementation of Homotopic Path Planning Method With Automatic Assignment of Repulsion ParameterDocument31 pagesEnergies: FPGA Implementation of Homotopic Path Planning Method With Automatic Assignment of Repulsion ParameterMario CalderonPas encore d'évaluation
- Intelligent Paging Strategy For Multi-Carrier CDMA System: KeywordsDocument7 pagesIntelligent Paging Strategy For Multi-Carrier CDMA System: KeywordsOpeyemi DadaPas encore d'évaluation
- Chap6 Trafic BookDocument33 pagesChap6 Trafic BookAndres orozcoPas encore d'évaluation
- A Dynamic Traffic Assignment Method For Planning and Telematic ApplicationsDocument13 pagesA Dynamic Traffic Assignment Method For Planning and Telematic ApplicationsHenriquePas encore d'évaluation
- Advanced Routing Algorithms and Load Balancing On MPLS: E-MailDocument6 pagesAdvanced Routing Algorithms and Load Balancing On MPLS: E-MailJyoti Rohitt SharmaPas encore d'évaluation
- Data Mininig ProjectDocument28 pagesData Mininig ProjectKarthikeyan Manimaran67% (3)
- MECH60561 2022 23 Pressure Vessel ExerciseDocument3 pagesMECH60561 2022 23 Pressure Vessel ExerciseAli JabranPas encore d'évaluation
- Brian Speed Keith Gordon Kevin Evans: Found Math - Spec B00.qxd 02/03/06 13:23 Page IDocument6 pagesBrian Speed Keith Gordon Kevin Evans: Found Math - Spec B00.qxd 02/03/06 13:23 Page IDavid ReesPas encore d'évaluation
- Chapter 3 (Laplace Transform)Document14 pagesChapter 3 (Laplace Transform)EmmanuelPas encore d'évaluation
- Deterministic Phase Retrieval: A Green's Function SolutionDocument8 pagesDeterministic Phase Retrieval: A Green's Function Solutionlednakashim100% (1)
- Rounding PDFDocument1 pageRounding PDFfajar081Pas encore d'évaluation
- Burning Rate Propeling ChargeDocument5 pagesBurning Rate Propeling ChargeFira Putri WulandariPas encore d'évaluation
- CDMA Simulation: Alison Hightman Elaine Chung Alejandra GalvanDocument30 pagesCDMA Simulation: Alison Hightman Elaine Chung Alejandra GalvanericnanePas encore d'évaluation
- EnergyPendulum Gizmo 2Document6 pagesEnergyPendulum Gizmo 2Delia SmithPas encore d'évaluation
- Report-Motion in 1d-Part IIDocument10 pagesReport-Motion in 1d-Part IIAlper SaglamPas encore d'évaluation
- Small Satellite Thermal Design, Test and AnalysisDocument12 pagesSmall Satellite Thermal Design, Test and AnalysisMihaela NastasePas encore d'évaluation
- Teoria de Control IIDocument11 pagesTeoria de Control IIRicardo ZapataPas encore d'évaluation
- Finite Element Analysis of Hospital BEDDocument10 pagesFinite Element Analysis of Hospital BEDG SATHVIKPas encore d'évaluation
- GATE ECE Solved Paper - 2005Document24 pagesGATE ECE Solved Paper - 2005Shashi KanthPas encore d'évaluation
- Aits 2021 FT Ix Jeem.Document16 pagesAits 2021 FT Ix Jeem.Atharv AtolePas encore d'évaluation
- Dynamics Tutorial 1Document2 pagesDynamics Tutorial 1ethanPas encore d'évaluation
- EE5143 Tutorial1Document5 pagesEE5143 Tutorial1Sayan Rudra PalPas encore d'évaluation
- Benchmark Systems For Digital Computer Simulation of A Static Transfer SwitchDocument8 pagesBenchmark Systems For Digital Computer Simulation of A Static Transfer SwitchArturo Isidro Conde PérezPas encore d'évaluation
- D-Wave Articulo Prof Venegas Del de Youtube PDFDocument31 pagesD-Wave Articulo Prof Venegas Del de Youtube PDFMarco A. ErazoPas encore d'évaluation
- Marasigan, Christian M. CE-2202 Hydrology Problem Set - Chapter 4 Streamflow MeasurementDocument10 pagesMarasigan, Christian M. CE-2202 Hydrology Problem Set - Chapter 4 Streamflow Measurementchrstnmrsgn100% (1)
- Maths PDFDocument60 pagesMaths PDFLoh Chee WeiPas encore d'évaluation
- Aristo Zenon Ve Stadyum ParadoksuDocument21 pagesAristo Zenon Ve Stadyum Paradoksuaysel alagozPas encore d'évaluation
- Select Option Modulepool SAP ABAPDocument4 pagesSelect Option Modulepool SAP ABAPsssdfgdgPas encore d'évaluation
- Discuss The Concept of Semantics and Elaborate NameDocument4 pagesDiscuss The Concept of Semantics and Elaborate NameAnonymous R99uDjYPas encore d'évaluation
- 2139 12021 1 PB PDFDocument9 pages2139 12021 1 PB PDFSantosh Kumar PandeyPas encore d'évaluation
- Lab Activity 8 and 9 Class IxDocument4 pagesLab Activity 8 and 9 Class IxSiddhant NarayanPas encore d'évaluation
- Lec 10Document4 pagesLec 10RKD CinemaPas encore d'évaluation
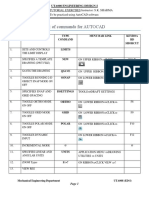
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDocument15 pagesList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelPas encore d'évaluation
- Lesson Plan - Maths - Create Graphs Based On Data CollectedDocument2 pagesLesson Plan - Maths - Create Graphs Based On Data Collectedapi-464562811Pas encore d'évaluation
- Intro To Machine Learning: Pembelajaran Mesin D4 Ti IFY IT Del 2019Document17 pagesIntro To Machine Learning: Pembelajaran Mesin D4 Ti IFY IT Del 2019Hanzel ArdeoPas encore d'évaluation
- Beginning AutoCAD® 2022 Exercise Workbook: For Windows®D'EverandBeginning AutoCAD® 2022 Exercise Workbook: For Windows®Pas encore d'évaluation
- AutoCAD 2010 Tutorial Series: Drawing Dimensions, Elevations and SectionsD'EverandAutoCAD 2010 Tutorial Series: Drawing Dimensions, Elevations and SectionsPas encore d'évaluation
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)D'EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Évaluation : 5 sur 5 étoiles5/5 (2)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsD'EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsPas encore d'évaluation
- SolidWorks 2015 Learn by doing-Part 1D'EverandSolidWorks 2015 Learn by doing-Part 1Évaluation : 4.5 sur 5 étoiles4.5/5 (11)
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationD'EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationÉvaluation : 5 sur 5 étoiles5/5 (1)