Vous aimerez peut-être aussi
- Sonda LogicaDocument5 pagesSonda LogicaMarcelo RodriguezPas encore d'évaluation
- Codigos Obd2 Diagnostico p0100 - p0199Document7 pagesCodigos Obd2 Diagnostico p0100 - p0199Daruin Andres Florez CardonaPas encore d'évaluation
- Sensor de RielDocument8 pagesSensor de RielPaula100% (1)
- Sensor FRPDocument5 pagesSensor FRPJefferson ElbreyPas encore d'évaluation
- MeM 021 ABS ESP ASRDocument10 pagesMeM 021 ABS ESP ASROscar SerranoPas encore d'évaluation
- Curso acelerador electrónico mariposaDocument25 pagesCurso acelerador electrónico mariposaFacu Pravos100% (1)
- Alarma Exfxpx Renault KwidDocument1 pageAlarma Exfxpx Renault KwidJuan Carlos Ruiz0% (1)
- Remapeado Basico Con Super TunerDocument25 pagesRemapeado Basico Con Super TunerJESUS MARIA MORENOPas encore d'évaluation
- Bobinas de Ignición INFORMDocument3 pagesBobinas de Ignición INFORMalejandroPas encore d'évaluation
- Curso de Electricidad RenaultDocument2 pagesCurso de Electricidad RenaultRichard Jesus Coello PerezPas encore d'évaluation
- Macr33 U1 DR1Document24 pagesMacr33 U1 DR1maximo saavedra castilloPas encore d'évaluation
- CKP - CMP AsdDocument14 pagesCKP - CMP AsdLuis Cuzco100% (2)
- Presentación para CFIE - MultiplexadoDocument20 pagesPresentación para CFIE - MultiplexadoMatias NeiraPas encore d'évaluation
- 2.2.1 Semana 8 - CANDocument44 pages2.2.1 Semana 8 - CANpakopollo700Pas encore d'évaluation
- Curso de Carburacion Parte 1Document18 pagesCurso de Carburacion Parte 1Dani-meganeboyPas encore d'évaluation
- Como Hacer Un Provador o Punta LogicaDocument20 pagesComo Hacer Un Provador o Punta LogicaCamilo Andres Penagos S.Pas encore d'évaluation
- Full CanDocument36 pagesFull CanSergio Antonio Muñoz BritoPas encore d'évaluation
- DTCS y MasDocument55 pagesDTCS y MasOscar Villaseñor100% (1)
- Regulador multifunción BoschDocument6 pagesRegulador multifunción BoschJfalcon DjzetusPas encore d'évaluation
- Punta de Prueba AutomotrizDocument12 pagesPunta de Prueba AutomotrizcalvitoPas encore d'évaluation
- CAN-BUS Red ConfortDocument10 pagesCAN-BUS Red Confortcocoliso44Pas encore d'évaluation
- Los Problemas y La Reparación Del AlternadorDocument25 pagesLos Problemas y La Reparación Del AlternadorlervinjcPas encore d'évaluation
- Reparación y Programación de Tableros DigitalesDocument13 pagesReparación y Programación de Tableros DigitalesJosias Alvarez rojasPas encore d'évaluation
- Catalogo - D&M Con Precio U$DDocument14 pagesCatalogo - D&M Con Precio U$DJony MacPas encore d'évaluation
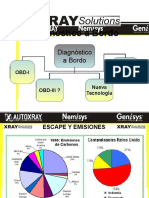
- Diagnóstico a Bordo OBDDocument37 pagesDiagnóstico a Bordo OBDIrving Andrade Chigo100% (1)
- Redes CAN-BUS vehículos: Diagnóstico y fallasDocument21 pagesRedes CAN-BUS vehículos: Diagnóstico y fallasPatricio ValenciaPas encore d'évaluation
- Ensamble VW SedanDocument179 pagesEnsamble VW SedancuauhtemocPas encore d'évaluation
- Climatron I CDocument8 pagesClimatron I CjfdezmtnezPas encore d'évaluation
- Encendido Electrc3b3nico PDFDocument160 pagesEncendido Electrc3b3nico PDFRoger Martinez100% (1)
- Manual de Actualizacion Por Internet X431Document15 pagesManual de Actualizacion Por Internet X431Katherine Gutierrez100% (1)
- Manual SPCADNDocument44 pagesManual SPCADNSoporteCondistelec CondistelecPas encore d'évaluation
- Autodiagnostico de Varias MarcasDocument5 pagesAutodiagnostico de Varias Marcaswilliam_senati20057051Pas encore d'évaluation
- Sistemas Inmovilizadores - Blog Técnico AutomotrizDocument6 pagesSistemas Inmovilizadores - Blog Técnico AutomotrizAdalberto Castro VerdugoPas encore d'évaluation
- Tutorial Convertidor Catalitico AutomotorDocument4 pagesTutorial Convertidor Catalitico AutomotorguidoPas encore d'évaluation
- Leccion 1 Redes de Comunicación AutomotrizDocument14 pagesLeccion 1 Redes de Comunicación AutomotrizceledonioPas encore d'évaluation
- A05-A06 - Controlador CAN - TrabajoDocument17 pagesA05-A06 - Controlador CAN - Trabajomanuel segoviaPas encore d'évaluation
- Bobinas HumedasDocument11 pagesBobinas HumedasJesús VencedorPas encore d'évaluation
- Sistema de Carga (Despiece, Comprobaciiones y Armado Del Alternador)Document19 pagesSistema de Carga (Despiece, Comprobaciiones y Armado Del Alternador)Santi Llivisaca RamosPas encore d'évaluation
- Prueba de Mosfet PDFDocument1 pagePrueba de Mosfet PDFGiraldoCarpioRamosPas encore d'évaluation
- Modulo de EncendidoDocument9 pagesModulo de EncendidoAnonymous y4hpgljMdPas encore d'évaluation
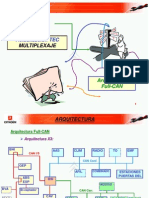
- Technologia MULTIPLEXAJEDocument22 pagesTechnologia MULTIPLEXAJEDiego Vergara PinoPas encore d'évaluation
- Manual See Ictvjo 2019 Harold Perez PDFDocument73 pagesManual See Ictvjo 2019 Harold Perez PDFbryan linarezPas encore d'évaluation
- Presentacion Banco de PruebasDocument37 pagesPresentacion Banco de PruebasoscarPas encore d'évaluation
- Auto AutoCom AutoElectronicaDocument2 510 pagesAuto AutoCom AutoElectronicaautoelectronicamlPas encore d'évaluation
- Electrotencia 2 (Simbologia Elect. Automotriz y Designacion de Bornes)Document5 pagesElectrotencia 2 (Simbologia Elect. Automotriz y Designacion de Bornes)Francisco Fabian Valencia TipanPas encore d'évaluation
- Protocolos OBDIIDocument5 pagesProtocolos OBDIIBaltasar Elias CervantesPas encore d'évaluation
- Manual Renault PDFDocument105 pagesManual Renault PDFjimalexx100% (1)
- Diagrama Caja de Fusibles FORD FIESTA 2014Document7 pagesDiagrama Caja de Fusibles FORD FIESTA 2014Fernando Reales BorjaPas encore d'évaluation
- 7 Pasos Sensor Oxigeno - Full Motores CheckDocument8 pages7 Pasos Sensor Oxigeno - Full Motores CheckJose HuescaPas encore d'évaluation
- Motor Ford Dragon 3i 1Document5 pagesMotor Ford Dragon 3i 1julianjoaquinorlandidiazPas encore d'évaluation
- Curso de Technologia MULTIPLEXAJE 2010Document27 pagesCurso de Technologia MULTIPLEXAJE 2010Angel Berrios100% (1)
- Bobinas COPDocument2 pagesBobinas COPjoseadonaymoralesacosta100% (1)
- Averias en El Sistema Multiplexado - CANbus PDFDocument23 pagesAverias en El Sistema Multiplexado - CANbus PDFjmarsaajosPas encore d'évaluation
- Sistema de AlarmaDocument23 pagesSistema de AlarmaFRANK TORRES DIAZ100% (1)
- Automóviles Y Accesorios: Los Pequeños Dispositivos Que Personalizan El Lujo...D'EverandAutomóviles Y Accesorios: Los Pequeños Dispositivos Que Personalizan El Lujo...Pas encore d'évaluation
- Ejemplo de AstableDocument4 pagesEjemplo de AstableDaniel Ñahuis TisnadoPas encore d'évaluation
- LM 5555Document5 pagesLM 5555Samuel Baldiviezo100% (1)
- Circuito 555 ModifDocument14 pagesCircuito 555 ModifAura Lila TorresPas encore d'évaluation
- Astable 555Document4 pagesAstable 555Michael Chicoma DiazPas encore d'évaluation
- 555: Versátil CI temporizadorDocument5 pages555: Versátil CI temporizador'aaloonzoo LareezzPas encore d'évaluation
- Ejemplos 1 Pruebas de Hipotesis MediasDocument5 pagesEjemplos 1 Pruebas de Hipotesis MediasJRluckyPas encore d'évaluation
- Ejer. Resueltos EstadisticaDocument64 pagesEjer. Resueltos EstadisticaFREDDY72% (128)
- Resueltos Intervalos de ConfianzaDocument2 pagesResueltos Intervalos de ConfianzaEdgar Mauricio Munar BenitezPas encore d'évaluation
- Automatizacion y Control (9022)Document47 pagesAutomatizacion y Control (9022)Gustavo Alvarado RamirezPas encore d'évaluation
- FESTO Electroneumatica Ejercicios 093018 - DocumentsDocument200 pagesFESTO Electroneumatica Ejercicios 093018 - DocumentsJoako AguilarPas encore d'évaluation
- Resueltos Intervalos de ConfianzaDocument2 pagesResueltos Intervalos de ConfianzaEdgar Mauricio Munar BenitezPas encore d'évaluation
- Uso Fluid SimDocument1 pageUso Fluid SimJoako AguilarPas encore d'évaluation
- Manual Practiques NeumaticaDocument62 pagesManual Practiques NeumaticaJesus MaestrePas encore d'évaluation
- Automatizacion y Control (9022)Document47 pagesAutomatizacion y Control (9022)Gustavo Alvarado RamirezPas encore d'évaluation
- FESTO Electroneumatica Ejercicios 093018 - DocumentsDocument200 pagesFESTO Electroneumatica Ejercicios 093018 - DocumentsJoako AguilarPas encore d'évaluation
- Curva de Un Sistema de Tuberias. - Ingenieria CivilDocument5 pagesCurva de Un Sistema de Tuberias. - Ingenieria CivilJoako AguilarPas encore d'évaluation
- Ejercicios Del Servicio Bien PDFDocument20 pagesEjercicios Del Servicio Bien PDFJoako AguilarPas encore d'évaluation
- Control PWM de velocidad de motor DC con 555 y MOSFETDocument4 pagesControl PWM de velocidad de motor DC con 555 y MOSFETJoako AguilarPas encore d'évaluation
- Previo PDFDocument16 pagesPrevio PDFJoako AguilarPas encore d'évaluation
- Bombas en Serie y Paralelo - Maariisool Pérez - Academia - EduDocument10 pagesBombas en Serie y Paralelo - Maariisool Pérez - Academia - EduJoako AguilarPas encore d'évaluation
- Control PWM de velocidad de motor DC con 555 y MOSFETDocument4 pagesControl PWM de velocidad de motor DC con 555 y MOSFETJoako AguilarPas encore d'évaluation
- Soldadura Por Arco Eléctrico Con Electrodo RevestidoDocument21 pagesSoldadura Por Arco Eléctrico Con Electrodo RevestidoAurora Carrión AdrianzénPas encore d'évaluation
- Instalaciones eléctricas en media y baja tensión CuscoDocument30 pagesInstalaciones eléctricas en media y baja tensión CuscoDeyvis Oscar Florez HachaPas encore d'évaluation
- Zelio Time Re22r1cmrDocument7 pagesZelio Time Re22r1cmrRob Porras LuchiniPas encore d'évaluation
- CETECOS Electronica BasicaDocument13 pagesCETECOS Electronica BasicaYenco Barliza Diaz100% (1)
- Proyecto de Memoria de Calculo Electrico de Una FermentadoraDocument13 pagesProyecto de Memoria de Calculo Electrico de Una Fermentadorascrew_x3100% (1)
- Practica Nº3 - Campo Eléctrico - Distribuciones DiscretasDocument3 pagesPractica Nº3 - Campo Eléctrico - Distribuciones DiscretasLarico Ramos JulioPas encore d'évaluation
- Electromagnetic ADocument8 pagesElectromagnetic Ajuan camiloPas encore d'évaluation
- Manual de Cálculo Fotovoltaica Aislada - Parte IIDocument6 pagesManual de Cálculo Fotovoltaica Aislada - Parte IIagustin_charbo83Pas encore d'évaluation
- Valor Promedio, Valor Máximo, Valor PicoDocument10 pagesValor Promedio, Valor Máximo, Valor PicoPedro Antonio Torres HerediaPas encore d'évaluation
- Ex Final ElectricaDocument2 pagesEx Final ElectricaMilton SanchezPas encore d'évaluation
- Procedimiento Medicion de Voltaje en InterruptoresDocument3 pagesProcedimiento Medicion de Voltaje en InterruptoresAgueda Herrera EscobedoPas encore d'évaluation
- Plan de Trabajo Del EstudianteDocument10 pagesPlan de Trabajo Del EstudianteDenis ApagueñoPas encore d'évaluation
- Fuentes de PotenciaDocument4 pagesFuentes de PotenciamarysolPas encore d'évaluation
- Potencia InformesDocument8 pagesPotencia InformesDiego Melendrez NagasakiPas encore d'évaluation
- Campo eléctrico de distribuciones lineales de carga en Física 2Document2 pagesCampo eléctrico de distribuciones lineales de carga en Física 2LeticiaPas encore d'évaluation
- Taller 1Document2 pagesTaller 1camiloPas encore d'évaluation
- Memoria Explicativa Parque UrbanoDocument28 pagesMemoria Explicativa Parque Urbanoedotorres237542Pas encore d'évaluation
- Informe Lab.1 Fisica 2Document8 pagesInforme Lab.1 Fisica 2JosePas encore d'évaluation
- Ej Estatica Faltantes 6.1-6.28Document15 pagesEj Estatica Faltantes 6.1-6.28Daniel Mendoza0% (1)
- Informe 7 Lab MaquinasDocument10 pagesInforme 7 Lab MaquinasROBERTO GASPAR ESCOBEDO CONTRERASPas encore d'évaluation
- Informe Tres Laboratorio de ElectronicaDocument11 pagesInforme Tres Laboratorio de ElectronicaCamilo SanabriaPas encore d'évaluation
- 3m CatalogoDocument44 pages3m CatalogoasssasasPas encore d'évaluation
- Practica 3Document1 pagePractica 3Luis Del Rosario100% (1)
- L S N L: Inductancia (Henrios)Document10 pagesL S N L: Inductancia (Henrios)mirla7421Pas encore d'évaluation
- Reglamento obras eléctricas ROEIDocument3 pagesReglamento obras eléctricas ROEILeo Ponce0% (1)
- 7 - Modulos Fotovoltaicos ISOFOTONDocument37 pages7 - Modulos Fotovoltaicos ISOFOTONMariano Del Campo Garcia0% (1)
- Acoplador de Antena QRP para HFDocument5 pagesAcoplador de Antena QRP para HFMarceloPas encore d'évaluation
- Micela Pereira. Informe 2. InstruDocument24 pagesMicela Pereira. Informe 2. InstruMicaela PereiraPas encore d'évaluation
- Caracterización de una fuente de tensión continuaDocument9 pagesCaracterización de una fuente de tensión continuaDeyvi AguilarPas encore d'évaluation
- Informe Potencia en Corriente DirectaDocument2 pagesInforme Potencia en Corriente DirectajulianaPas encore d'évaluation