Vous aimerez peut-être aussi
- B - Lecture3 The Transfer Function and Block Diagram Automatic Control SystemDocument21 pagesB - Lecture3 The Transfer Function and Block Diagram Automatic Control SystemAbaziz Mousa OutlawZz100% (1)
- B - Lecture10 The Root Locus Rules Automatic Control SystemDocument31 pagesB - Lecture10 The Root Locus Rules Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- B - Lecture11 Extension of The Root Locus Automatic Control SystemDocument15 pagesB - Lecture11 Extension of The Root Locus Automatic Control SystemAbaziz Mousa OutlawZz100% (1)
- B - Lecture6 Time-Domain Specifications Automatic Control SystemDocument18 pagesB - Lecture6 Time-Domain Specifications Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- Jet Tour of Release 12.1 and Immersed Boundary Solver in ANSYS FLUENTDocument12 pagesJet Tour of Release 12.1 and Immersed Boundary Solver in ANSYS FLUENTTebong BrowserPas encore d'évaluation
- ANSYS Analysis of Single Phase Induction Motor - Hani Aziz AmeenDocument74 pagesANSYS Analysis of Single Phase Induction Motor - Hani Aziz AmeenHani Aziz Ameen50% (2)
- Humidity & Temperature Controller Pro.Document41 pagesHumidity & Temperature Controller Pro.Amir WagdarikarPas encore d'évaluation
- Dynamic Systems Mathematical Topics 031906 DYNSYSDocument80 pagesDynamic Systems Mathematical Topics 031906 DYNSYSjohn_max03Pas encore d'évaluation
- Temperature Sensing/Monitoring Using Lm35 & Atmega8Document6 pagesTemperature Sensing/Monitoring Using Lm35 & Atmega8Suket75% (4)
- Siemens PLC: Chapter FiveDocument25 pagesSiemens PLC: Chapter FiveplcmanaPas encore d'évaluation
- Programming in CDocument56 pagesProgramming in CJazz Virak100% (1)
- Lecture Notes - MIT - System IdentificationDocument30 pagesLecture Notes - MIT - System IdentificationsabrahimaPas encore d'évaluation
- STM32F30xx-31xx Standard Peripheral Library UM1581Document584 pagesSTM32F30xx-31xx Standard Peripheral Library UM1581John LeungPas encore d'évaluation
- Ansys WorkbenchDocument20 pagesAnsys Workbenchmshyamm220% (1)
- Center Crack Problem To Evaluate SIF (Mode-I) Solving Procedure Using Ansys 11 - By: Alfred Franklin.VDocument5 pagesCenter Crack Problem To Evaluate SIF (Mode-I) Solving Procedure Using Ansys 11 - By: Alfred Franklin.VAlfred Franklin V100% (3)
- EE-232 Lab Manual Signals and SystemsDocument57 pagesEE-232 Lab Manual Signals and SystemsMuhammad YousafPas encore d'évaluation
- VibrationControl CATALOGO SOPORTES PDFDocument12 pagesVibrationControl CATALOGO SOPORTES PDFMilena Lemus FonsecaPas encore d'évaluation
- ANSYS WorkBench 14.5 Submodeling GuideDocument26 pagesANSYS WorkBench 14.5 Submodeling GuideAshish VajirPas encore d'évaluation
- PLC Exercises Ladder Diagram ProgrammingDocument27 pagesPLC Exercises Ladder Diagram Programmingمحمد سليمانPas encore d'évaluation
- Space Claim Knob Bracket TutorialDocument32 pagesSpace Claim Knob Bracket Tutorial조기현Pas encore d'évaluation
- Wxmaxima Cheat Sheet PDFDocument2 pagesWxmaxima Cheat Sheet PDFBill Carrera100% (5)
- Temperature Control Using LabviewDocument5 pagesTemperature Control Using LabviewReyyan KhalidPas encore d'évaluation
- Introduction To Control Systems: Ece-FcsDocument71 pagesIntroduction To Control Systems: Ece-FcsBUENAOBRA VASHPas encore d'évaluation
- PADT Webinar Post26 2012 - 04 - 12Document54 pagesPADT Webinar Post26 2012 - 04 - 12Jack FusionPas encore d'évaluation
- Simulation - Thermal AssignmentDocument2 pagesSimulation - Thermal Assignmentsumardiono10Pas encore d'évaluation
- Estimation of SIF by Mumerical MethodDocument21 pagesEstimation of SIF by Mumerical Methodworkineh gebeyehuPas encore d'évaluation
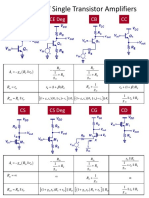
- Transistor Amplifier SummaryDocument1 pageTransistor Amplifier SummaryJhonPas encore d'évaluation
- 4 - The Finite Volume Method For Convection-Diffusion Problems - 2Document25 pages4 - The Finite Volume Method For Convection-Diffusion Problems - 2Abaziz Mousa OutlawZzPas encore d'évaluation
- HW1Document11 pagesHW1Tao Liu YuPas encore d'évaluation
- QA For PV 2010Document5 pagesQA For PV 2010Alok DasPas encore d'évaluation
- Dead ZoneDocument1 pageDead ZoneManinder Singh100% (1)
- Chemical Engineering Equipment Design and DimensioningDocument104 pagesChemical Engineering Equipment Design and DimensioningAimanPas encore d'évaluation
- Gravitational Mass Carried by Sound WavesDocument6 pagesGravitational Mass Carried by Sound WavesJohnPas encore d'évaluation
- Lab 5 ControlDocument6 pagesLab 5 ControlAyaz AhmadPas encore d'évaluation
- Lab Manual - EEE 402 - Exp01 July2014Document7 pagesLab Manual - EEE 402 - Exp01 July2014AhammadSifatPas encore d'évaluation
- EMG Machine AmplifierDocument12 pagesEMG Machine AmplifierShauki AliPas encore d'évaluation
- Guided ANSYS-Mode Hands-On Tutorial: H. Dieter Wilhelm December 11, 2012Document26 pagesGuided ANSYS-Mode Hands-On Tutorial: H. Dieter Wilhelm December 11, 2012marcorreo_pePas encore d'évaluation
- Rigid Surfaces in Ansys WorkbenchDocument5 pagesRigid Surfaces in Ansys WorkbenchburcakozkokPas encore d'évaluation
- System Simulation Using Matlab, State Plane PlotsDocument7 pagesSystem Simulation Using Matlab, State Plane PlotsmosictrlPas encore d'évaluation
- Week 1 - Intro To Control SystemsDocument45 pagesWeek 1 - Intro To Control SystemsArkie BajaPas encore d'évaluation
- Vlsi Lab Manual 17ecl77 2020 SaitDocument157 pagesVlsi Lab Manual 17ecl77 2020 Saitsuraj jha100% (1)
- Control System Question BankDocument3 pagesControl System Question Bankmanish_iitrPas encore d'évaluation
- ch06 07Document18 pagesch06 07Kunwar Mahipal Singh Kheechee100% (1)
- List of Note Taking Abbreviations in English From A To ZDocument5 pagesList of Note Taking Abbreviations in English From A To ZfaeiqPas encore d'évaluation
- Advanced Mathcad Eda, Incorporated: SpecialtiesDocument10 pagesAdvanced Mathcad Eda, Incorporated: SpecialtiesggPas encore d'évaluation
- Markl SIFs & Asme ViiiDocument3 pagesMarkl SIFs & Asme ViiiDesmond ChangPas encore d'évaluation
- GraphDocument93 pagesGraphMuhammed Jehangir KhanPas encore d'évaluation
- Evaluation of The Transient Response of A DC MotorDocument6 pagesEvaluation of The Transient Response of A DC MotorNesuh MalangPas encore d'évaluation
- Control Engineering: For Third YearDocument9 pagesControl Engineering: For Third YearsaidikPas encore d'évaluation
- ECE485/585: Programmable Logic Controllers Exam #1 (Sample Style Questions) Instructor: Dr. D. J. JacksonDocument4 pagesECE485/585: Programmable Logic Controllers Exam #1 (Sample Style Questions) Instructor: Dr. D. J. Jacksonnida haqPas encore d'évaluation
- 8086 Microprocessors & Peripherals OverviewDocument31 pages8086 Microprocessors & Peripherals OverviewAbdul Qadeer100% (4)
- The Finite Element Method and Applications in Engineering Using Ansys®Document5 pagesThe Finite Element Method and Applications in Engineering Using Ansys®sivaraju22Pas encore d'évaluation
- Embedded LabDocument98 pagesEmbedded LabRajkumarPas encore d'évaluation
- Topic 3-Part 2-Frequency ResponseDocument54 pagesTopic 3-Part 2-Frequency ResponseBautista, Aljhon G.Pas encore d'évaluation
- Notes-Nyquist Plot and Stability CriteriaDocument16 pagesNotes-Nyquist Plot and Stability CriteriaGanesh RadharamPas encore d'évaluation
- 04-Popov and Circle Criterion PDFDocument7 pages04-Popov and Circle Criterion PDFlalita pargaiPas encore d'évaluation
- Tuning PID controllers for level control of a nonlinear tank modelDocument9 pagesTuning PID controllers for level control of a nonlinear tank modelIsraelPas encore d'évaluation
- Arijit Nath - Nyquist PlotDocument8 pagesArijit Nath - Nyquist PlotTry mePas encore d'évaluation
- China (Asia in Focus Series)Document525 pagesChina (Asia in Focus Series)Abaziz Mousa OutlawZz100% (5)
- Homework 6 Automatic Control SystemDocument1 pageHomework 6 Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- A Guide To Essay Translation From Chinese Into English and Vice VersaDocument320 pagesA Guide To Essay Translation From Chinese Into English and Vice VersawarnerPas encore d'évaluation
- Chinese Business Etiquette and CultureDocument219 pagesChinese Business Etiquette and CultureMithun Dey100% (1)
- Homework 5 Automatic Control SystemDocument1 pageHomework 5 Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- B - Lecture13 Bode Diagram of Open-Loop System and Minimum-Phase Transfer Function Automatic Control SystemDocument10 pagesB - Lecture13 Bode Diagram of Open-Loop System and Minimum-Phase Transfer Function Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- B - Lecture16 Bode Compensation and PID Controller Automatic Control SystemDocument28 pagesB - Lecture16 Bode Compensation and PID Controller Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- B - Lecture15 System Analysis Based On The Frequency ResponseDocument13 pagesB - Lecture15 System Analysis Based On The Frequency ResponseAbaziz Mousa OutlawZzPas encore d'évaluation
- B - Lecture9 The Steaty-State Error Automatic Control SystemDocument13 pagesB - Lecture9 The Steaty-State Error Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- Homework 5 Answer Automatic Control SystemDocument2 pagesHomework 5 Answer Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- B - Lecture12 Frequency Response and PlotAutomatic Control SystemDocument29 pagesB - Lecture12 Frequency Response and PlotAutomatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- B - Lecture11 Example of Root-Locus Automatic Control SystemDocument2 pagesB - Lecture11 Example of Root-Locus Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- B - Lecture9 Examples of Steady-State Error Automatic Control SystemDocument3 pagesB - Lecture9 Examples of Steady-State Error Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- B - Lecture8 The Routh Criterion Automatic Control SystemDocument30 pagesB - Lecture8 The Routh Criterion Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- Homework 3 Answer Automatic Control SystemDocument1 pageHomework 3 Answer Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- Homework 4 Automatic Control SystemDocument1 pageHomework 4 Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- Homework 3 Automatic Control SystemDocument1 pageHomework 3 Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- B - Lecture7 Time Responses of Prototype Systems Automatic Control SystemDocument34 pagesB - Lecture7 Time Responses of Prototype Systems Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- Homework 6 Answer Automatic Control SystemDocument4 pagesHomework 6 Answer Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- Homework 4 Answer Automatic Control SystemDocument2 pagesHomework 4 Answer Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- Homework 2 Automatic Control SystemDocument1 pageHomework 2 Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- B Lecture7 Example MIT16 06F12 Lecture 5 Automatic Control SystemDocument5 pagesB Lecture7 Example MIT16 06F12 Lecture 5 Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- Homework 2 Answer Automatic Control SystemDocument3 pagesHomework 2 Answer Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- Homework 1 Automatic Control SystemDocument1 pageHomework 1 Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- TF of Automatic Control SystemDocument24 pagesTF of Automatic Control SystemSiraphob SantironnarongPas encore d'évaluation
- Homework 1 Answer Automatic Control SystemDocument2 pagesHomework 1 Answer Automatic Control SystemAbaziz Mousa OutlawZzPas encore d'évaluation
- Control Engineering IDocument175 pagesControl Engineering IMuhamed MahmoudPas encore d'évaluation
- Mathematics: 2009 School Certificate TestDocument36 pagesMathematics: 2009 School Certificate TestUghExtPas encore d'évaluation
- JNU MTech CSE Question Paper-2012Document33 pagesJNU MTech CSE Question Paper-2012ankitconnected136100% (5)
- Long Bondpaper Graphing Paper: SampleDocument2 pagesLong Bondpaper Graphing Paper: SampleYsaka St. Tocinto0% (1)
- Equation of Parabola Opens DownwardDocument33 pagesEquation of Parabola Opens DownwardJohn NavosPas encore d'évaluation
- An Investigation Into The Causes of Poor Academic Performannce in Mathematics Among University Students in NigeriaDocument10 pagesAn Investigation Into The Causes of Poor Academic Performannce in Mathematics Among University Students in Nigeriaisaac e ochigboPas encore d'évaluation
- Digital Circuits Lab Experiment 1 - Logic Gates FundamentalsDocument7 pagesDigital Circuits Lab Experiment 1 - Logic Gates Fundamentalsfaizan bariPas encore d'évaluation
- COPY-Intermediate Algebra - MAT 016 Final Exam ReviewDocument13 pagesCOPY-Intermediate Algebra - MAT 016 Final Exam ReviewMarvin RubiaPas encore d'évaluation
- MathematicsDocument8 pagesMathematicsGeorge Isaac McQuilesPas encore d'évaluation
- Identification of Individual Types of Harmonic Loads in An Electric Power System BusDocument4 pagesIdentification of Individual Types of Harmonic Loads in An Electric Power System BusTarak BenslimanePas encore d'évaluation
- Basketball Teams Optimal Offensive Strategy Depends on Multiple FactorsDocument9 pagesBasketball Teams Optimal Offensive Strategy Depends on Multiple FactorsCoach-NeilKhayechPas encore d'évaluation
- 2022 Wts 10 Mathematics Guide Q & S-1Document202 pages2022 Wts 10 Mathematics Guide Q & S-1syamthandamanana79Pas encore d'évaluation
- Math 7 - Quiz 2.4 - Q2 W 7-8Document3 pagesMath 7 - Quiz 2.4 - Q2 W 7-8Angel Maye VidallonPas encore d'évaluation
- Edu 214 Final Presentation Lesson PlanDocument3 pagesEdu 214 Final Presentation Lesson Planapi-540998942Pas encore d'évaluation
- Econometrics NotesDocument2 pagesEconometrics NotesDaniel Bogiatzis GibbonsPas encore d'évaluation
- Tuning Protocol Focusing Question and LessonDocument13 pagesTuning Protocol Focusing Question and Lessonapi-217542693Pas encore d'évaluation
- Problems Based On Selective Conditions: ExampleDocument4 pagesProblems Based On Selective Conditions: ExampleRamNagalPas encore d'évaluation
- OOP - I - GTU - Study - Material - Lab Manual - Object Oriented Programming - I (3140705) - 08052020070602AM PDFDocument129 pagesOOP - I - GTU - Study - Material - Lab Manual - Object Oriented Programming - I (3140705) - 08052020070602AM PDFRakesh Venkatesan100% (1)
- TwolayermodelDocument6 pagesTwolayermodeltaphuongkyPas encore d'évaluation
- Section A: Sample/Pre-Board Paper 3 5 Class X Term 1 Exam Nov - Dec 2021 Mathematics (Standard) 041Document6 pagesSection A: Sample/Pre-Board Paper 3 5 Class X Term 1 Exam Nov - Dec 2021 Mathematics (Standard) 041Ashwani PathakPas encore d'évaluation
- Continuity AssignmentDocument5 pagesContinuity AssignmentChauhan DharmendraPas encore d'évaluation
- Random Walks in One Dimension: Steven P. LalleyDocument10 pagesRandom Walks in One Dimension: Steven P. LalleyAmina lbrahimPas encore d'évaluation
- Exam C ManualDocument810 pagesExam C ManualAnonymous RNacXQ100% (1)
- (1987) A Perturbation Solution For Compressible Viscous Channel FlowDocument18 pages(1987) A Perturbation Solution For Compressible Viscous Channel FlowJing-Wu DongPas encore d'évaluation
- Final Assignment SolutionsDocument2 pagesFinal Assignment SolutionsMd. Shahajada Imran 1520675642Pas encore d'évaluation
- Predicate Logic PDFDocument22 pagesPredicate Logic PDF01689373477Pas encore d'évaluation
- Calculator Activity Code with MethodsDocument22 pagesCalculator Activity Code with MethodsGeorge Christopher PahlPas encore d'évaluation
- Mathscape 9 ExtentionDocument624 pagesMathscape 9 Extentionsquishyapply68% (19)
- Composing and Recursively Defining FunctionsDocument10 pagesComposing and Recursively Defining FunctionsAndrew WenPas encore d'évaluation