Vous aimerez peut-être aussi
- Workbook of Cuneiform Signs, Daniel Snell PDFDocument147 pagesWorkbook of Cuneiform Signs, Daniel Snell PDFMatias RitzPas encore d'évaluation
- Digital Systems and Options CatalogDocument581 pagesDigital Systems and Options CatalogTheAnonymousLugiaPas encore d'évaluation
- Tube-Mac Metric CatalogeDocument279 pagesTube-Mac Metric CatalogeTheAnonymousLugia100% (2)
- PDP-11/70 Processor Handbook (1977-1978)Document284 pagesPDP-11/70 Processor Handbook (1977-1978)TheAnonymousLugia100% (1)
- DEC STD 159 Massbus SpecificatonDocument97 pagesDEC STD 159 Massbus SpecificatonTheAnonymousLugiaPas encore d'évaluation
- Tube-Mac® Piping Technologies Ltd. Catalogue (Imperial Units)Document364 pagesTube-Mac® Piping Technologies Ltd. Catalogue (Imperial Units)TheAnonymousLugiaPas encore d'évaluation
- Anatomy and Pathology of The Whale Heart With Special Reference To The Coronary CirculationDocument29 pagesAnatomy and Pathology of The Whale Heart With Special Reference To The Coronary CirculationTheAnonymousLugiaPas encore d'évaluation
- Zilog Z-80 Product SpecificationsDocument10 pagesZilog Z-80 Product SpecificationsTheAnonymousLugiaPas encore d'évaluation
- Zilog Z-80 CPU Technical ManualDocument83 pagesZilog Z-80 CPU Technical ManualTheAnonymousLugiaPas encore d'évaluation
- Z-80 Counter/Timer Circuit SpecificationDocument12 pagesZ-80 Counter/Timer Circuit SpecificationTheAnonymousLugiaPas encore d'évaluation
- Z80 DataBookDocument131 pagesZ80 DataBookkgrhoadsPas encore d'évaluation
- Pipe Fittings & Port AdaptersDocument26 pagesPipe Fittings & Port AdaptersdekgalePas encore d'évaluation
- Cable Cross References List (July 1970)Document38 pagesCable Cross References List (July 1970)TheAnonymousLugiaPas encore d'évaluation
- MODCOMP II Computer Reference ManualDocument156 pagesMODCOMP II Computer Reference ManualTheAnonymousLugiaPas encore d'évaluation
- IBM C20-8011: Random Number Generation and TestingDocument20 pagesIBM C20-8011: Random Number Generation and TestingTheAnonymousLugiaPas encore d'évaluation
- Technical Documentation Catalog (January 1979)Document112 pagesTechnical Documentation Catalog (January 1979)TheAnonymousLugiaPas encore d'évaluation
- Versatape BrochureDocument2 pagesVersatape BrochureTheAnonymousLugiaPas encore d'évaluation
- IBM C20-8062: Index Organization For Information RetrievalDocument69 pagesIBM C20-8062: Index Organization For Information RetrievalTheAnonymousLugiaPas encore d'évaluation
- Autonetics RECOMP II BrochureDocument5 pagesAutonetics RECOMP II BrochureTheAnonymousLugiaPas encore d'évaluation
- Learning To Use Your RDOS/DOS SystemDocument113 pagesLearning To Use Your RDOS/DOS SystemTheAnonymousLugiaPas encore d'évaluation
- Learning To Use Your RDOS/DOS SystemDocument113 pagesLearning To Use Your RDOS/DOS SystemTheAnonymousLugiaPas encore d'évaluation
- IBM C20-8060: Document and Accounting ControlsDocument19 pagesIBM C20-8060: Document and Accounting ControlsTheAnonymousLugiaPas encore d'évaluation
- IBM F20-8052-1: A Unique Computable Name Code For Alphabetic Account NumberingDocument30 pagesIBM F20-8052-1: A Unique Computable Name Code For Alphabetic Account NumberingTheAnonymousLugiaPas encore d'évaluation
- IBM C20-8011: Random Number Generation and TestingDocument20 pagesIBM C20-8011: Random Number Generation and TestingTheAnonymousLugiaPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Ipason Product CatalogueDocument72 pagesIpason Product CatalogueithacaPas encore d'évaluation
- CATIA V5 - Administration Des Standards Du Module Drafting PDFDocument23 pagesCATIA V5 - Administration Des Standards Du Module Drafting PDFmilasko86Pas encore d'évaluation
- Group B04 - MM2 - Pepper Spray Product LaunchDocument34 pagesGroup B04 - MM2 - Pepper Spray Product LaunchBharatSubramonyPas encore d'évaluation
- 07-GB Column BasesDocument14 pages07-GB Column BasesAUNGPSPas encore d'évaluation
- PCBA-WP543HV HW Manual Rev1.05Document21 pagesPCBA-WP543HV HW Manual Rev1.05Surapong Pongchaiprateep100% (1)
- 7810-8110-Ca-1540-651-001 - HP FG KodDocument68 pages7810-8110-Ca-1540-651-001 - HP FG Kodgopal krishnan0% (1)
- Service Manual Repair 552-557 PDFDocument3 278 pagesService Manual Repair 552-557 PDFSerg la RoshPas encore d'évaluation
- Betriebsanleitung Engl PDFDocument812 pagesBetriebsanleitung Engl PDFotipi100% (3)
- 243 RegulatorDocument24 pages243 RegulatorDavid Somogyi DovalPas encore d'évaluation
- FEE Lab Manual FinalDocument86 pagesFEE Lab Manual FinalbalasubadraPas encore d'évaluation
- 002 SM MP4054Document2 009 pages002 SM MP4054tranquangthuanPas encore d'évaluation
- Aluminum History PDFDocument20 pagesAluminum History PDFelmardaPas encore d'évaluation
- Digital Market Space in BeautyDocument48 pagesDigital Market Space in BeautyInaPas encore d'évaluation
- Crash Course in Office 365:: How It Can Help You Grow Your BusinessDocument32 pagesCrash Course in Office 365:: How It Can Help You Grow Your BusinessEsrael Waworuntu0% (1)
- Mechanical and Micro Structure of MDF Processed MaterialDocument8 pagesMechanical and Micro Structure of MDF Processed MaterialSharath P CPas encore d'évaluation
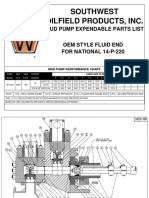
- Oem National 14-P-220 7500psiDocument9 pagesOem National 14-P-220 7500psiandrew0% (1)
- Market Intelligence Case Study Sales & MarketingDocument20 pagesMarket Intelligence Case Study Sales & MarketingBrian ShannyPas encore d'évaluation
- Dokumen - Tips Cfm56 7 B AnswerbookDocument75 pagesDokumen - Tips Cfm56 7 B AnswerbookOnur YayPas encore d'évaluation
- 4 Litre Closed SamplersDocument3 pages4 Litre Closed Samplerslimhockkin3766Pas encore d'évaluation
- Is 15462 2004 Modified Rubber BItumen PDFDocument16 pagesIs 15462 2004 Modified Rubber BItumen PDFrajeshji_000100% (3)
- How Is Saleable Area CalculatedDocument5 pagesHow Is Saleable Area CalculatedkailashPas encore d'évaluation
- Aniuk SpecimenDocument10 pagesAniuk SpecimenMario ParraPas encore d'évaluation
- Logic SelectivityDocument6 pagesLogic SelectivitymoosuhaibPas encore d'évaluation
- Westerbeke 4,5BCGTC Instruction Manual PDFDocument53 pagesWesterbeke 4,5BCGTC Instruction Manual PDFcengiz kutukcu100% (2)
- Vladimir Lopez Stem Teacher ResumeDocument1 pageVladimir Lopez Stem Teacher Resumeapi-325782374Pas encore d'évaluation
- Spring Setting of Piping Connected To A CompressorDocument4 pagesSpring Setting of Piping Connected To A CompressorSharun SureshPas encore d'évaluation
- ModelsGuidelines v5Document37 pagesModelsGuidelines v5Martin NolanPas encore d'évaluation
- OD (In) Weight (PPF) I.D (In) Capacity (BPF)Document8 pagesOD (In) Weight (PPF) I.D (In) Capacity (BPF)Ebrahim SoleimaniPas encore d'évaluation
- Set-1-Index001-ERA - ERTMS - 003204 v500 Functional Requirements SpecificationDocument98 pagesSet-1-Index001-ERA - ERTMS - 003204 v500 Functional Requirements SpecificationShauna MoorePas encore d'évaluation