Vous aimerez peut-être aussi
- Matriz de Marco Lógico para mejorar el proceso de envasado de cervezaDocument2 pagesMatriz de Marco Lógico para mejorar el proceso de envasado de cervezaJoss Gallegos100% (1)
- Sistema asistido envasado cervezaDocument30 pagesSistema asistido envasado cervezaJoss Gallegos0% (1)
- Matriz de Marco Lógico para mejorar el proceso de envasado de cervezaDocument2 pagesMatriz de Marco Lógico para mejorar el proceso de envasado de cervezaJoss Gallegos100% (1)
- 49,92 Valor A PagarDocument1 page49,92 Valor A PagarqueeniePas encore d'évaluation
- PLC Proceso PLC SensoresDocument8 pagesPLC Proceso PLC SensoresJoss GallegosPas encore d'évaluation
- Sistema TegumentarioDocument27 pagesSistema TegumentarioJoss GallegosPas encore d'évaluation
- INFORME Mi Amigo DivinoDocument3 pagesINFORME Mi Amigo DivinoJoss GallegosPas encore d'évaluation
- Proyecto Ayala Gallegos RojasDocument14 pagesProyecto Ayala Gallegos RojasJoss GallegosPas encore d'évaluation
- Laboratorio 9 Circuitos DigitalesDocument3 pagesLaboratorio 9 Circuitos DigitalesJoss GallegosPas encore d'évaluation
- Matriz de Marco Lógico para mejorar el proceso de envasado de cervezaDocument2 pagesMatriz de Marco Lógico para mejorar el proceso de envasado de cervezaJoss Gallegos100% (1)
- Modelo Convenio de Pasantía - IndividualDocument2 pagesModelo Convenio de Pasantía - IndividualJoss GallegosPas encore d'évaluation
- Fuentes HIDDocument33 pagesFuentes HIDJoss GallegosPas encore d'évaluation
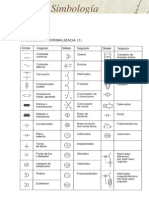
- Simbología eléctricaDocument24 pagesSimbología eléctricaEfren ZamoraPas encore d'évaluation
- Contact OresDocument9 pagesContact OresJoss GallegosPas encore d'évaluation
- Ejercicio 2.1 PLC 2256Document4 pagesEjercicio 2.1 PLC 2256Joss GallegosPas encore d'évaluation
- Arias, Gallegos, Procel - Preparatorio Control de Motor DC - 2494Document7 pagesArias, Gallegos, Procel - Preparatorio Control de Motor DC - 2494Joss GallegosPas encore d'évaluation
- Controlador PID AnalogicoDocument2 pagesControlador PID AnalogicoJuan Garcia VillaPas encore d'évaluation
- PamDocument59 pagesPamJoss GallegosPas encore d'évaluation
- Laboratorio TIMER PLCDocument4 pagesLaboratorio TIMER PLCJoss GallegosPas encore d'évaluation
- Laboratorio 33 Comparacion Equipo 6 PLCDocument5 pagesLaboratorio 33 Comparacion Equipo 6 PLCJoss GallegosPas encore d'évaluation
- ENERGÍADocument1 pageENERGÍAJoss GallegosPas encore d'évaluation
- Arias, Gallegos, Procel Control Por Triacs 2494Document9 pagesArias, Gallegos, Procel Control Por Triacs 2494Joss GallegosPas encore d'évaluation
- Consultas 2do ParcialDocument3 pagesConsultas 2do ParcialJoss GallegosPas encore d'évaluation
- Simulacion Comunicaciones Modulador AmDocument14 pagesSimulacion Comunicaciones Modulador AmJoss GallegosPas encore d'évaluation
- Procesamiento de ImagenesDocument6 pagesProcesamiento de ImagenesJoss GallegosPas encore d'évaluation
- Modulador AMDocument11 pagesModulador AMJoss GallegosPas encore d'évaluation
- Practik 6Document6 pagesPractik 6Joss GallegosPas encore d'évaluation
- King, Martin LutherDocument9 pagesKing, Martin LutherJoss GallegosPas encore d'évaluation
- Seguimiento Del Mercado Del Arroz de La FAODocument17 pagesSeguimiento Del Mercado Del Arroz de La FAOfelibertoPas encore d'évaluation
- Examenes Balance ScorecardDocument27 pagesExamenes Balance ScorecardJimena Perez75% (8)
- Actividad 3 - Definición de Objetivos76876corregidafinalDocument2 pagesActividad 3 - Definición de Objetivos76876corregidafinalBrayan Per RodPas encore d'évaluation
- Higiene y Seguridad en ObraDocument49 pagesHigiene y Seguridad en ObraKevin G. MonjaPas encore d'évaluation
- Informe de Selección Auxiliar de Bodega Juan Camilo GilDocument3 pagesInforme de Selección Auxiliar de Bodega Juan Camilo Giltalento.humanoPas encore d'évaluation
- Calidad Total - Iso 9Document9 pagesCalidad Total - Iso 9recientelodiPas encore d'évaluation
- Adecuación de Productos A La ExportaciónDocument2 pagesAdecuación de Productos A La ExportaciónAzaelFerTorresTorresPas encore d'évaluation
- Crisis Imperio Romano Siglo IIIDocument8 pagesCrisis Imperio Romano Siglo IIIMaria Matilde CisnerosPas encore d'évaluation
- Excel BonosDocument10 pagesExcel Bonosmarcos marianiPas encore d'évaluation
- Presupuesto Print 28.06.23Document14 pagesPresupuesto Print 28.06.23Gerson Mackenzie RubioPas encore d'évaluation
- Colaborativo - Fase - 4 Sociolagia UnadDocument4 pagesColaborativo - Fase - 4 Sociolagia Unadximenacastro1203Pas encore d'évaluation
- Megasagersa Sac Presentacion CortaDocument17 pagesMegasagersa Sac Presentacion CortaMEGASAGERSA SAC (51) 2612764 / (51) 996600898 / (51) 989202274Pas encore d'évaluation
- Archivo Permanente - Agro Quimica Silva S.A.CDocument125 pagesArchivo Permanente - Agro Quimica Silva S.A.Cluz maribel50% (2)
- Normas valuacion medicionDocument3 pagesNormas valuacion medicionJuan Cruz Ledesma PadillaPas encore d'évaluation
- Mejora Del Plan Estrategico SenaDocument28 pagesMejora Del Plan Estrategico SenaMiguel RojasPas encore d'évaluation
- Análisis Del Plan de Actividades Del Equipo ComercialDocument6 pagesAnálisis Del Plan de Actividades Del Equipo ComercialMind de ColombiaPas encore d'évaluation
- Clase #12 - Certificados y Factura ConformadaDocument14 pagesClase #12 - Certificados y Factura Conformadajean pierre alvarado ramosPas encore d'évaluation
- UNPHU PF PGPMA11 Anualidades Anticipadas y Diferidas 2020Document16 pagesUNPHU PF PGPMA11 Anualidades Anticipadas y Diferidas 2020El Charasquiada CharroPas encore d'évaluation
- Ascensores y MontacargasDocument78 pagesAscensores y MontacargasCoinsesa100% (1)
- Presupuesto de ProducciónDocument7 pagesPresupuesto de ProducciónSergio CalelPas encore d'évaluation
- Definitivajueves31julio PDFDocument24 pagesDefinitivajueves31julio PDFPagina web Diario elsigloPas encore d'évaluation
- Ratios Financieros Caso PracticoDocument7 pagesRatios Financieros Caso PracticoJhenny Sebastian Tacuche100% (2)
- M8 U2 A1 BLMS Analisis PDFDocument9 pagesM8 U2 A1 BLMS Analisis PDFBlanca MendezPas encore d'évaluation
- Valores de Desahogo Estimados Según El Tipo de Prenda y Volumen Deseado 2Document15 pagesValores de Desahogo Estimados Según El Tipo de Prenda y Volumen Deseado 2Henry Javier Goyes100% (2)
- Actividad 2Document4 pagesActividad 2mariany sanchez100% (4)
- Izaje 200Document23 pagesIzaje 200NAO_198Pas encore d'évaluation
- Utilidad de PresupuestoDocument3 pagesUtilidad de PresupuestoBRENDA50% (2)
- Proyecto Chifa Casi Listo V2Document98 pagesProyecto Chifa Casi Listo V2Christian Choquehuanca PacoriPas encore d'évaluation
- Sector Terciario. Servicios. Comercio Interior y Exterior. Balanza Comercial. (Austria)Document2 pagesSector Terciario. Servicios. Comercio Interior y Exterior. Balanza Comercial. (Austria)IrenePas encore d'évaluation