Vous aimerez peut-être aussi
- Diseño de Celdas RobóticasDocument13 pagesDiseño de Celdas RobóticasMonse Acosta0% (1)
- Seguridad en Celdas RobotizadasDocument10 pagesSeguridad en Celdas RobotizadasChristian LascanoPas encore d'évaluation
- ABB - 3HAC047136 PM IRC5-es PDFDocument348 pagesABB - 3HAC047136 PM IRC5-es PDFantonioPas encore d'évaluation
- Robot Studio 3 (1) .2 Guia Del Usuario SpanishDocument424 pagesRobot Studio 3 (1) .2 Guia Del Usuario Spanishairon_iva7880Pas encore d'évaluation
- Diseño de Celdas RobóticasDocument5 pagesDiseño de Celdas RobóticasJuan Carlos Barberán MuñozPas encore d'évaluation
- Operacion de Robots CRSDocument46 pagesOperacion de Robots CRSJorge L. Aguilar MartínezPas encore d'évaluation
- Kuka KR6 R900Document41 pagesKuka KR6 R900LUIS ALBERTO AYRA ROMERO100% (1)
- TSM C001 Curso Basico PLCDocument22 pagesTSM C001 Curso Basico PLCJason PerezPas encore d'évaluation
- 4 ED Programación de SubrutinasDocument9 pages4 ED Programación de SubrutinasAlfredo Manuel Romo CruzPas encore d'évaluation
- Sistemas de Coordenadas. TCPDocument12 pagesSistemas de Coordenadas. TCPJose Antonio Mercado100% (1)
- MANUAL ROBOT MotomanDocument5 pagesMANUAL ROBOT Motomanrulomagana0% (1)
- ROBODKDocument91 pagesROBODKnick100% (2)
- CV-X Series Setup Manual - ESPDocument218 pagesCV-X Series Setup Manual - ESPJuan Antonio Sánchez0% (1)
- Lenguaje de Programacion KukaDocument14 pagesLenguaje de Programacion KukaSebastianD.L.T.CastañedaPas encore d'évaluation
- Manual Kuka 13Document496 pagesManual Kuka 13Albert Llobet Sixto67% (6)
- Flexpendant Abb PDFDocument366 pagesFlexpendant Abb PDFOmar RamosPas encore d'évaluation
- Programación de Robots IDocument181 pagesProgramación de Robots IMaldito SudacaPas encore d'évaluation
- Como Usar Cosimir EducationDocument35 pagesComo Usar Cosimir EducationJose Armando Ascencio Olvera100% (1)
- Entradas y SalidasDocument71 pagesEntradas y SalidasJose Antonio MercadoPas encore d'évaluation
- Kuka MecanizadoDocument17 pagesKuka MecanizadoAndres EspinosaPas encore d'évaluation
- Software CosimirDocument8 pagesSoftware CosimirCarlos PavaPas encore d'évaluation
- 01 - Ast Cambio de Encoder Robot FanucDocument3 pages01 - Ast Cambio de Encoder Robot FanucEduardo BrisoPas encore d'évaluation
- Tutorial Delmia 1 PDFDocument18 pagesTutorial Delmia 1 PDFingmontoya704754Pas encore d'évaluation
- Variables de Systema - EsDocument204 pagesVariables de Systema - EsiagomouPas encore d'évaluation
- 3HAC020738 RESOLUCION DE PROBLEMAS IRC5-es PDFDocument586 pages3HAC020738 RESOLUCION DE PROBLEMAS IRC5-es PDFrikardo530100% (2)
- Manual Robótica UTN - 2. La Seguridad en Las Celdas RobotizadasDocument48 pagesManual Robótica UTN - 2. La Seguridad en Las Celdas RobotizadasLaura Velazquez100% (1)
- Diseño Celdas RobóticasDocument8 pagesDiseño Celdas RobóticasChristian Lascano0% (1)
- Caracerizacion de Robot FamucDocument70 pagesCaracerizacion de Robot FamucJulia FernandezPas encore d'évaluation
- Guía Del Estudiante Mtto Elect R30iA Esp - Rev 0.0Document198 pagesGuía Del Estudiante Mtto Elect R30iA Esp - Rev 0.0ds42058Pas encore d'évaluation
- Manual Del Operador: Unidad MecánicaDocument230 pagesManual Del Operador: Unidad Mecánicabatiste alandetePas encore d'évaluation
- Karel: Guía de ProgramaciónDocument25 pagesKarel: Guía de ProgramaciónJacobo Hernández VPas encore d'évaluation
- Capitulo 9Document27 pagesCapitulo 9zakty_182Pas encore d'évaluation
- Informe PTPDocument13 pagesInforme PTPJacobo Javier Cáceres RodríguezPas encore d'évaluation
- PRACTICA 2 - Control Manual y Automatico de Un Motor MonofasicoDocument8 pagesPRACTICA 2 - Control Manual y Automatico de Un Motor MonofasicoEnrique BautistaPas encore d'évaluation
- Procedimiento para Preconfigurar Robots de Soldadura Fanuc v.ACDocument32 pagesProcedimiento para Preconfigurar Robots de Soldadura Fanuc v.ACJose Guillermo vazquez reyesPas encore d'évaluation
- Procedimiento Cambio de Pilas y Calibracion Robots FanucDocument11 pagesProcedimiento Cambio de Pilas y Calibracion Robots FanucMauricio GassmanPas encore d'évaluation
- Programación TPE Nivel B FANUC RoboguideDocument132 pagesProgramación TPE Nivel B FANUC RoboguideOscar Jiménez100% (2)
- Proyecto Final-AutomatizacionDocument70 pagesProyecto Final-AutomatizacionDrimec SrlPas encore d'évaluation
- Manuel Robot ABB-2600Document408 pagesManuel Robot ABB-2600Tadeo Tadeo100% (2)
- Mantenimiento Robot ABBDocument2 pagesMantenimiento Robot ABBRene Axel Montes RochaPas encore d'évaluation
- Resumen de La Norma ISO 10218Document14 pagesResumen de La Norma ISO 10218kevinPas encore d'évaluation
- Manual IRB1600Document420 pagesManual IRB1600AquilesPas encore d'évaluation
- Guia Rapida FANUCVAG PDFDocument13 pagesGuia Rapida FANUCVAG PDFkuajarlosPas encore d'évaluation
- Generación de TrayectoriasDocument18 pagesGeneración de TrayectoriasErick CastilloPas encore d'évaluation
- Programar Robots ABBDocument234 pagesProgramar Robots ABBGerardo Misael Garcia100% (6)
- Configuracion de PLCDocument58 pagesConfiguracion de PLCFranco SotoPas encore d'évaluation
- Rapid Abb EspañolDocument927 pagesRapid Abb EspañolJosePas encore d'évaluation
- Práctica 4 - RoboDk - OfflineDocument9 pagesPráctica 4 - RoboDk - OfflineEdison AlvaradoPas encore d'évaluation
- Celulas RobotizadasDocument4 pagesCelulas RobotizadasOscarPas encore d'évaluation
- Robot 1L (5612)Document41 pagesRobot 1L (5612)Carlos AntonioPas encore d'évaluation
- RESUMEN 1 RobóticaDocument24 pagesRESUMEN 1 RobóticaVivian AlvezPas encore d'évaluation
- TEMA01Document31 pagesTEMA01Manuel Garcia SuarezPas encore d'évaluation
- Paper. Robótica Industrial PDFDocument6 pagesPaper. Robótica Industrial PDFSebastián Contreras Ortiz100% (2)
- Preguntas Examen T8Document4 pagesPreguntas Examen T8Jesus Mejias CortesPas encore d'évaluation
- RoboticaDocument113 pagesRoboticaRafael RodriguezPas encore d'évaluation
- Guia CirosDocument91 pagesGuia CirosHéctor PeñaPas encore d'évaluation
- Pract 1 DataDocument8 pagesPract 1 DataRicardo UribePas encore d'évaluation
- Introduccion A La RoboticaDocument5 pagesIntroduccion A La RoboticaGanimedes EstelarPas encore d'évaluation
- Robotica - Brazo Robotico Con Pic'sDocument9 pagesRobotica - Brazo Robotico Con Pic'sRaul Alberto Valdez BarreraPas encore d'évaluation
- Tarea#1 - Román Eduardo Olivares GómezDocument17 pagesTarea#1 - Román Eduardo Olivares GómezLuis ChongPas encore d'évaluation
- Todas Las Dimensiones Estan en MM: Taco de AjusteDocument1 pageTodas Las Dimensiones Estan en MM: Taco de AjusteEberthsonPas encore d'évaluation
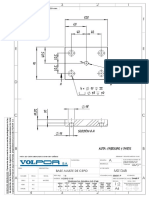
- Todas Las Dimensiones Estan en MM: Base Ajuste de CepoDocument1 pageTodas Las Dimensiones Estan en MM: Base Ajuste de CepoEberthsonPas encore d'évaluation
- Todas Las Dimensiones Estan en MM: Barra de Ø 12Document1 pageTodas Las Dimensiones Estan en MM: Barra de Ø 12EberthsonPas encore d'évaluation
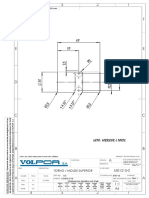
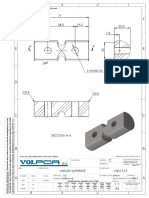
- Todas Las Dimensiones Estan en MM: Torno / Molde SuperiorDocument1 pageTodas Las Dimensiones Estan en MM: Torno / Molde SuperiorEberthsonPas encore d'évaluation
- Todas Las Dimensiones Estan en MM: Nota: Las Cotas Marcadas Con O Son CríticasDocument1 pageTodas Las Dimensiones Estan en MM: Nota: Las Cotas Marcadas Con O Son CríticasEberthsonPas encore d'évaluation
- Todas Las Dimensiones Estan en MM: CamaraDocument1 pageTodas Las Dimensiones Estan en MM: CamaraEberthsonPas encore d'évaluation
- Todas Las Dimensiones Estan en MM: Nota: Las Cotas Marcadas Con O Son CríticasDocument1 pageTodas Las Dimensiones Estan en MM: Nota: Las Cotas Marcadas Con O Son CríticasEberthsonPas encore d'évaluation
- Cascaras y Tabiques Verticales Tecnologia y Tecnica c1 2021Document36 pagesCascaras y Tabiques Verticales Tecnologia y Tecnica c1 2021EberthsonPas encore d'évaluation
- Corte Estructural Propuesta Final Extra GrandeDocument1 pageCorte Estructural Propuesta Final Extra GrandeEberthsonPas encore d'évaluation
- Boca de LlenadoDocument1 pageBoca de LlenadoEberthsonPas encore d'évaluation
- Agujeros Roscados Ciegos TTIDocument1 pageAgujeros Roscados Ciegos TTIEberthsonPas encore d'évaluation
- Corte Estructural Casa Final A2Document1 pageCorte Estructural Casa Final A2Eberthson100% (1)
- Posición Descripción #De Plano Revisión Cantidad Marcación ObservacionesDocument1 pagePosición Descripción #De Plano Revisión Cantidad Marcación ObservacionesEberthsonPas encore d'évaluation
- m00441 Premec Bolsillo de 1 PulgDocument1 pagem00441 Premec Bolsillo de 1 PulgEberthsonPas encore d'évaluation
- Codigo SN 03Document20 pagesCodigo SN 03EberthsonPas encore d'évaluation
- Vebvg BG GDocument1 pageVebvg BG GEberthsonPas encore d'évaluation
- X Problemas Resueltos de Ondas SonorasDocument10 pagesX Problemas Resueltos de Ondas Sonorasjimmy celly100% (3)
- Geometria - 2do Año - Guia Nº7 - RepasoDocument5 pagesGeometria - 2do Año - Guia Nº7 - RepasoCarolina Izquierdo Sandoval100% (1)
- Capitulo 2 Arreglos NumericosDocument28 pagesCapitulo 2 Arreglos NumericosDiego CerqueraPas encore d'évaluation
- Algebra Lineal Matrices.Document103 pagesAlgebra Lineal Matrices.Junior T FarroñayPas encore d'évaluation
- Taller 5 MecanicaDocument4 pagesTaller 5 MecanicaDanielOrtizPas encore d'évaluation
- Teoría SolidosDocument8 pagesTeoría SolidoslauralorentemartinezPas encore d'évaluation
- Lectura e Interpretación de MapasDocument7 pagesLectura e Interpretación de MapasdimarPas encore d'évaluation
- Lopez Campos Francisco Javier Regresion Lineal Multiple InvestigacionDocument13 pagesLopez Campos Francisco Javier Regresion Lineal Multiple InvestigacionLópez Campos Francisco JavierPas encore d'évaluation
- Universidad Del Atlantico Topografia 2019Document17 pagesUniversidad Del Atlantico Topografia 2019William TorresPas encore d'évaluation
- ProgLF U2 A1 Eq8Document12 pagesProgLF U2 A1 Eq8yessenia rodriguezPas encore d'évaluation
- Hojas de AplicacionDocument22 pagesHojas de AplicacionDannia Villazana Catacora0% (1)
- Prueba m4Document10 pagesPrueba m4Fernanda Henriquez GajardoPas encore d'évaluation
- Carly FisicaDocument8 pagesCarly FisicaEmily CasanovaPas encore d'évaluation
- Numeros DecimalesDocument10 pagesNumeros DecimalesUber Antonio Tito FloresPas encore d'évaluation
- Calculo de Perfil de Temperaturas en Lineas de DesfogueDocument9 pagesCalculo de Perfil de Temperaturas en Lineas de DesfogueingalcalagPas encore d'évaluation
- Geometria en ProcesoDocument5 pagesGeometria en ProcesoMaria CalderonPas encore d'évaluation
- Unidad I GeopresionesDocument12 pagesUnidad I Geopresionesalex garcia bernalPas encore d'évaluation
- Leyes Inferencia DetalladoDocument8 pagesLeyes Inferencia DetalladoJuan Manuel Perez MahechaPas encore d'évaluation
- Tipos de MuestreoDocument8 pagesTipos de MuestreoShirley QuijijePas encore d'évaluation
- Libro Enfoque de Técnicas de Distribución y SimulaciónDocument68 pagesLibro Enfoque de Técnicas de Distribución y SimulaciónZaida BernatePas encore d'évaluation
- Tema 3.3 Riesgos FinancierosDocument74 pagesTema 3.3 Riesgos FinancierosGerald VCPas encore d'évaluation
- Sistema de EcuacionesDocument4 pagesSistema de EcuacionesKevin LazaroPas encore d'évaluation
- Separata Numero 01 Mayo Agosto 2021 IiDocument19 pagesSeparata Numero 01 Mayo Agosto 2021 IiFrancoFernadezNoruegaPas encore d'évaluation
- Uso y Manejo de Fuentes de InformacionDocument242 pagesUso y Manejo de Fuentes de InformacionGabe Montes de Oca100% (1)
- PolinomiosDocument9 pagesPolinomiosMartina OppligerPas encore d'évaluation
- Volumen 21 1 PDFDocument89 pagesVolumen 21 1 PDFJean Carlos ValdiviaPas encore d'évaluation
- Sistema MúltipleDocument10 pagesSistema MúltipleBertario Ríos GarcíaPas encore d'évaluation
- Nuevo Texto de OpenDocumentDocument5 pagesNuevo Texto de OpenDocumentAlfredoPas encore d'évaluation
- FVsistolicaDocument93 pagesFVsistolicaRodrigo RainaPas encore d'évaluation
- Empezaremos Este Tema de La Rama de La Física Llamada Mecánica Con Las Leyes de La Mecanica Postuladas Por Sir Isaac NewtonDocument73 pagesEmpezaremos Este Tema de La Rama de La Física Llamada Mecánica Con Las Leyes de La Mecanica Postuladas Por Sir Isaac NewtonCéskar OrtizPas encore d'évaluation