Académique Documents
Professionnel Documents
Culture Documents
Rodrigo L Guedes
Transféré par
stgpereiraCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Rodrigo L Guedes
Transféré par
stgpereiraDroits d'auteur :
Formats disponibles
UNIVERSIDADE FEDERAL DE OURO PRETO
ESCOLA DE MINAS
COLEGIADO DO CURSO DE ENGENHARIA DE
CONTROLE E AUTOMAO - CECAU
RODRIGO LUIZ GUEDES
SISTEMA DE CONTROLE, UTILIZANDO CLP E
SUPERVISRIO, PARA CORREO DE FATOR DE
POTNCIA E BALANCEAMENTO DE FASES NO
SECUNDRIO DE UM TRANSFORMADOR DE UMA
SUBESTAO.
MONOGRAFIA DE GRADUAO EM ENGENHARIA DE CONTROLE E
AUTOMAO
Ouro Preto, 2009
RODRIGO LUIZ GUEDES
SISTEMA DE CONTROLE, UTILIZANDO CLP E
SUPERVISRIO, PARA CORREO DE FATOR DE
POTNCIA E BALANCEAMENTO DE FASES NO
SECUNDRIO DE UM TRANSFORMADOR DE UMA
SUBESTAO.
Monografia apresentada ao Curso de
Engenharia de Controle e Automao
da Universidade Federal de Ouro Preto
como parte dos requisitos para a
obteno do Grau de Engenheiro de
Controle e Automao.
Orientador:
Dr. Paulo Marcos de Barros Monteiro
Co-orientador:
Dr. Agnaldo Jos de Rocha Reis
Ouro Preto
Escola de Minas UFOP
Dezembro / 2009
G924s
Guedes, Rodrigo Luiz.
Sistema de controle, utilizando CLP e supervisrio,
para correo
de fator de potncia e balanceamento de fases no
secundrio de um
transformador de uma subestao [manuscrito] / Rodrigo
Luiz
Guedes. 2009.
43 f. : il., color. ; graf. ; tab.
Orientador: Prof. Agnaldo Jos da Rocha Reis,
Marcos de Barros Monteiro.
D
Monografia (Graduao) - Universidade Federal de Ouro
Preto. Escola de Minas. Colegiado do Curso de Engenharia
Controle e Automao.
rea de concentrao: Automao industrial.
Fonte de catalogao:
sisbin@sisbin.ufop.br
1. Sistemas
de controle. 2. CLP (controle lgico programvel).
3. Fator de potncia Correo. I. Universidade Federal de Ouro Preto.
II. Ttulo.
CDU: 681.5
AGRADECIMENTOS
Em primeiro lugar agradeo a Deus, por ter permitido mais este importante passo na
caminhada de minha vida, alcanado o objetivo de concluir o curso de engenharia.
Agradeo a meus pais, minhas irms, minha sobrinha, enfim a minha amada famlia da qual
recebi, apesar da distncia, todo a apoio necessrio durante esta importante fase de minha
vida.
Agradeo s verdadeiras amizades aqui seladas, com certeza as levarei comigo. Davi,
Fabiano, Gilberto, Lantiel Jr, Maicon, Marlos Brum, Rafael Koeler, Robson Lage, Shimith,
muito obrigado!
Agradeo a meus orientadores Agnaldo Reis e Paulo Monteiro pelo apoio, dedicao e acima
de tudo pela amizade e confiana. A professora Karla e ao laboratrio de Tecnologias
industriais.
RESUMO
Sistemas de controle que tem em sua base controladores lgicos programveis e sistema
supervisrio so usados de forma abrangente na indstria. Aqui
estas ferramentas so
aplicadas para tratar dois problemas em sistemas eltricos de potncia: a correo dinmica de
fator de potncia, e o complexo problema do balanceamento de cargas em um sistema
trifsico. Neste texto so descritos os procedimentos e conceitos utilizados na construo de
um sistema de controle utilizando controlador lgico programvel e sistema supervisrio,
aplicados ao secundrio de um transformador, cuja funes so monitorar e corrigir o
desbalancemento de cargas e o fator de potncia. A correo do fator de potncia feita
utilizando-se bancos de capacitores previamente calculados em paralelo com as cargas, e para
o problema do desbalanceamento de cargas aplicado uma implementao do algoritmo
baseado baseado em otimizao combinatria denominado algoritimo de trs fases.
Palavras chave: Sistemas de controle, controlador lgico programvel, correo de fator de
potncia, balanceamento de cargas.
ABSTRACT
Control systems which have on his base programmable logic controller and supervisory
systems are very much used in industry. On this text this tools are apply to solve two
problems in electrical systems: the dynamic potency factor correction, and the complex
problem of swaying load in a three phase systems. Its describe the behaviors and concepts
used to build a control system based in programmable logic controller and supervisory
systems applied on transform secondary hows function are monitoring and correct swaying
load, and the potency factor. The potency factor correction is done by introducing capacitors
previously calculate in parallel with loads, and to solve the swaying load problem is applied
an implementation an algorithm which have on his base optimization named three phase
algorithm.
Key words: Control systems, programmable logic controller, the potency facto correction,
swaying load.
LISTA DE FIGURAS
Figura 1.1
PIB x Consumo de energia eltrica no Brasil ................ 11
Figura 2.1
Dispositivo Eletrnico Inteligente (IED) ....................... 16
Figura 2.2
Aplicao Ladder ..... 19
Figura 2.3
Tenso em fase com Corrente ....................................... 21
Figura 2.4
Tenso e Corrente, defasadas ........................................ 21
Figura 2.5
Potncia Reativa ............................................................ 22
Figura 4.1
Pirmide de automao .................................................. 25
Figura 6.1
Montagem da maquete no Painel ................................. 32
Figura 6.2
Diagrama Eltrico do circuito para uma fase ................ 33
Figura 6.3
Circuito Montado na Matriz de contatos ....................... 33
Figura 7.1
CLP Ge Fanuc VersaMax .............................................. 34
Figura 8.1
Tela Transformadores ................................................. 36
Figura 8.2
Detalhes - Transformador A .......................................... 37
Figura 8.3
Tela Relatrios ............................................................ 37
Figura 8.4
Tela Histrico ............................................................. 38
Figura 8.5
Tela Balanceamento de Cargas ..................................... 38
LISTA DE QUADROS
Quadro 1.1
Capacidade instalada do SIN em 2007 .......................... 12
Quadro 9.1
Cargas Tempo defasagem............................................ 39
10
LISTA DE ABREVIAES
CLP
Controlador Lgico Programvel
PIB
Produto Interno Bruto
LIGTH
Companhia de Energia
FURNAS
Furnas Centrais Eltricas
CPFL
Companhia Paulista de Fora e Luz
CEMIG
Companhia Energtica de Minas Gerais
CHESF
Companhia Hidro Eltrica do So Francisco
ELETROBRAS Centrais Eltricas Brasileiras
SEP
Sistemas Eltricos de Potncia
FP
Fator de Potncia
ABNT
Associao Brasileira de Normas Tcnicas
SIN
Sistema Interligado Nacional
ONS
Operador do Sistema Eltrico
IED
Dispositivo Eletrnico Inteligente
SCADA
Supervisory Control And Data Acquisition
CPU
Unidade Central De Processamento
IEC
Internacional Electrotechnical Commission
UNIFEI
Universidade Federal de Itajub
Mbs
Mega bits por segundo
EPS
Enterprise Production Systems
ERP
Entreprise Resource Planning
MES
Manufacturing Execution System
PIMS
Plant Information Management System
SCDC
Sistema Digital de Controle Distribudo
UFOP
Universidade Federal de Ouro Preto
IHM
Interface Homem Mquina
LCD
Liquid Crystal Display
PWM
Pulse width Modulation
11
SUMRIO
1
INTRODUO .................................................................................................... 13
1.1
Relevncias do Trabalho ........................................................................................................ 14
1.2
Histrico do Sistema Eltrico Brasileiro ................................................................................ 15
1.3
Objetivos ................................................................................................................................. 16
1.4
Objetivos Gerais ..................................................................................................................... 17
1.5
Objetivos Especficos .............................................................................................................. 17
CONCEITOS FUNDAMENTAIS....................................................................... 18
2.1
Sistema Eltrico De Potncia .................................................................................................. 18
2.2
Principais dispositivos utilizados em SEP .............................................................................. 18
2.3
Sistema Supervisrio .............................................................................................................. 20
2.4
O Controlado Lgico Programvel ........................................................................................ 21
2.5
Linguagem De Programao De Clps ................................................................................... 21
2.6
Desequilbrio De Tenso ......................................................................................................... 23
2.7
Fator de potncia .................................................................................................................... 23
PRINCIPAIS TRABALHOS DESENVOLVIDOS ........................................... 26
3.1
Paredes .................................................................................................................................... 26
3.2
Souto e Fonseca ....................................................................................................................... 27
HIERARQUIA DA AUTOMAO INDUSTRIAL ......................................... 28
4.1
Sensores e atuadores - Nvel 1 ................................................................................................ 28
4.2
CLP / SCADA Nvel 2 .......................................................................................................... 29
4.3
Gerncia de Informao Nvel 3 .......................................................................................... 29
4.4
MES Manufacturing Execution System .............................................................................. 30
4.5
PIMS - Plant Information Management System ................................................................... 30
4.6
Sistemas Integrados de Gesto - Nvel 4 ................................................................................ 31
METODOLOGIA ................................................................................................ 32
5.1
Embasamento terico ............................................................................................................. 32
5.2
Desenvolvimento prtico ........................................................................................................ 32
12
5.3
Testes de conformidade .......................................................................................................... 33
A MAQUETE ........................................................................................................ 34
A PROGRAMAO DO CLP ........................................................................... 37
7.1
Correo FP ............................................................................................................................ 37
7.2
Balanceamento de Cargas ...................................................................................................... 38
O SUPERVISRIO .............................................................................................. 40
ANLISE E RESULTADOS ............................................................................... 43
10 CONCLUSES E SUGESTES PARA TRABALHOS FUTUROS .............. 45
13
1 INTRODUO
Devido importncia do uso da energia eltrica no parque industrial brasileiro, bem como a
dependncia desta fonte de energia e o alto custo a ela vinculado, faz-se necessrio a
utilizao deste recurso de forma eficiente. Assim pode-se garantir a economia de recursos,
segurana de operao, melhoria no uso de equipamentos e melhor aproveitamento de
recursos naturais.
A conscientizao para este assunto e consequentemente a mudana de atitude, tanto por parte
das indstrias quanto por parte da populao ganhou fora em 2001, momento em que
diversos fatores dirigiram o Brasil a uma situao de crise no setor eltrico.
Diante deste contexto o processo de automao e digitalizao de subestaes eltricas,
apresenta-se como proposta de soluo e, devido aos bons resultados j alcanados vem
recebendo crescentes incentivos.
Em uma subestao existem diversas variveis a serem controladas e monitoradas.
No
presente trabalho sero tratados os problemas da correo dinmica do fator de potncia e da
incluso de cargas em um sistema de forma a promover o balanceamento de cargas entre
fases.
Este trabalho tem como objetivo desenvolver um sistema de controle baseado em Software
Supervisrio e Controlador Lgico Programvel (CLP), com os seguintes requisitos
funcionais:
Comunicao com os equipamentos de uma subestao;
Aquisio dos dados do fator de potncia e grau de desbalanceamento das
cargas nas linhas de alimentao;
Apresentao do estado destas variveis na tela do software;
Anlise o e correo das variveis em tempo real.
14
Para atender a estes requisitos ser utilizado como ferramenta o Elipse Scada, um software
supervisrio de mercado, de propriedade da Elipse Software, um CLP GeFanuc VersaMax e o
software Proficy Machine, da General Eletric para a programao do CLP.
1.1 Relevncias do Trabalho
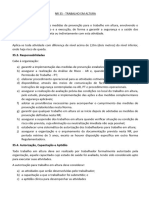
Conforme exposto por Bueno (2006) o consumo de energia eltrica apresenta uma alta
correlao com o desempenho da economia de um pas como um todo. Praticamente todos os
setores econmicos, que no somatrio anual de sua produo definem a magnitude do Produto
Interno Bruto (PIB), tm um componente de consumo de energia eltrica.
Figura 1.1 - PIB X Consumo de Energia Eltrica no Brasil.
FONTE: Anurio Estatstico Furnas, 2008.
Pelo grfico apresentado na figura 1.1 pode-se verificar a observao feita por Bueno.
Tambm possvel identificar uma tendncia de aumento de demanda de energia, e levando
em considerao o fato de que a maior parte da energia consumida no Brasil atualmente tem
sua origem em usinas hidreltricas (vide quadro 1.1), considerando tambm o alto
investimento necessrio para a construo destas usinas, todo o impacto ambiental e social
envolvido no processo de sua instalao, pode-se concluir que de extrema importncia uma
utilizao mas eficiente dos recursos j existentes.
Com um baixo fator de potncia, faz-se necessrio que se produza mais energia do que a que
realmente ser transformada em trabalho nas indstrias e residncias. Por outro lado,
estabelecer um ndice mnimo para o fator de potncia contribui significativamente para
aumentar a eficincia do consumo da energia j disponvel.
15
Quadro 1.1 Capacidade instalada do SIN em 2007.
FONTE: BUENO, 2009.
Fonte
Hidreltrica
MW
(%)
81.190
85,50
Gs
8.694
9,15
Nuclear
2.007
2,10
leo Combustvel
1.234
1,30
Carvo Mineral
1.410
1,50
462
0,50
94.997
100,00
Outras
Potncia Instalada
A implantao de um sistema de superviso se justifica no apenas pelos fatores globais
apresentados acima, mas tambm por benefcios internos e especficos de cada sistema de
transmisso.
Com a operao do sistema de superviso da subestao possvel fazer a monitorao de
cada varivel e sua correo em tempo real. Tambm beneficio do sistema de superviso a
monitorao de alarmes, facilitando a identificao do local especfico onde ocorreu algum
problema.
O sistema supervisrio tem ainda a possibilidade de fazer o registro de eventos e histrico das
grandezas eltricas (tenso, corrente, potncia) por meio de grficos, viabilizando uma
posterior anlise de modo a facilitar as tomadas de deciso por parte dos responsveis.
1.2 Histrico do Sistema Eltrico Brasileiro
Segundo Andrade (1993 apud BRANCO 1975) o setor eltrico braseiro teve suas atividades
iniciadas no final do sculo passado, apoiado em uma tendncia desenvolvimentista pioneira
dos estados de Minas Gerais e de So Paulo, que por iniciativa privada teve inicio em Juiz de
Fora.
Ainda seguindo Andrade (1993 apud CALABI 1983) o processo de desenvolvimento deste
setor ganhou impulso com as atividades de multinacionais como a LIGHT e a AMFOPR, que
16
depois de estabelecidas em regies de maior demanda como o eixo Rio - So Paulo e tambm
no interior do estado de So Paulo, estendendo-se posteriormente para outras capitais do pas.
Como a maior parte dos investimentos tinha origem externa, as empresas de distribuio
elegiam estas regies por possuir maior circulao de renda e concentrao de pessoas, o que
provocava a excluso das demais reas do pas e inflacionavam o preo do servio. Estas
reas mais isoladas eram ento obrigadas a utilizar a produo prpria de energia. (SANTOS,
2008).
Sobre conexes no sistema, existiam apenas algumas em pontos isolados entre empresas
como LIGHT, FURNAS, CPFL E CEMIG, que visavam atender os maiores centros de
consumo do pas (ANDRADE, 1993).
A partir dos anos 30, por clara incompatibilidade entre os interesses da iniciativa privada e as
necessidades do pas, a responsabilidade em investimentos e principalmente do
desenvolvimento do sistema eltrico brasileiro transferida ao poder pblico.
Diante deste problema o pas foi obrigado a conviver com uma situao de racionamento de
energia entre 1940 e o incio dos anos 60.
A partir de ento so iniciados grandes feitos do governo como a construo da Companhia
Hidro Eltrica do So Francisco (CHESF) em 1945, Furnas Centrais Eltricas em 1958 e a
criao das Centrais Eltricas Brasileiras (ELETROBRAS) em 1962 que receberia as
atribuies de promover estudos, projetos de construo e operao de usinas geradoras,
linhas de transmisso e subestaes destinadas ao suprimento de energia eltrica do pas.
(SANTOS, 2008).
1.3 Objetivos
Como o presente trabalho apresenta conceitos multidisciplinares seus objetivos so divididos
em gerais e especficos, e so apresentados abaixo.
17
1.4 Objetivos Gerais
O presente texto retrata uma das partes de um trabalho mais amplo, envolvendo o
desenvolvimento de um sistema supervisrio para correo do fator de potncia e
balanceamento de cargas de um sistema trifsico realizado simultaneamente pelos alunos
Davi Leite, Rodrigo Guedes e Robson Lage. Todos estes alunos do curso de Engenharia de
Controle e Automao, da Escola de Minas de Ouro Preto.
1.5 Objetivos Especficos
Desenvolver um Sistema Supervisrio para monitorao e controle do fator de potncia e
balanceamento de cargas de uma Subestao Eltrica.
18
2 CONCEITOS FUNDAMENTAIS
No inteno de neste tpico explorar exaustivamente o contedo que compem cada um
dos subitens, mas de apresentar uma breve reviso sobre os principais conceitos que se fazem
necessrios para auxiliar na compreenso deste trabalho.
Sero aqui apresentadas informaes importantes sobre Sistema Eltrico de Potncia,
Controladores Lgicos Programveis, Software Supervisrio, Fator de Potncia (FP) e
Desequilbrio de fases.
2.1
Sistema Eltrico De Potncia
Segundo a Associao Brasileira de Normas Tcnicas (ABNT), um Sistema Eltrico de
Potncia um conjunto das instalaes e equipamentos destinados gerao, transmisso e
distribuio de energia eltrica at a medio, inclusive.
No Brasil existe o Sistema Interligado Nacional (SIN) que de responsabilidade do Operador
do Sistema Eltrico (ONS), sistema hidrotrmico de grande porte, com forte predominncia
de usinas hidreltricas e com mltiplos proprietrios. O Sistema Interligado Nacional
formado pelas empresas das regies Sul, Sudeste, Centro-Oeste, Nordeste e parte da regio
Norte e conta com aproximadamente 96% da capacidade de produo de energia do Brasil.
2.2 Principais dispositivos utilizados em SEP
A partir do final da dcada de 90 observa-se a tecnologia da eletrnica digital conquistando
espao em sistemas integrados de proteo e controle de subestaes. Surge ento o conceito
de Dispositivo Eletrnico Inteligente (IED), o qual incorpora funes de execuo de lgicas
e automatismos. Na figura 2.1 apresenta-se um esquema das funes incorporadas por este
dispositivo (PEREIRA, 2008).
19
Alem dos dispositivos digitais descritos temos tambm os dispositivos tradicionais
Disjuntores dispositivos eletromecnicos de manobra, ou seja, ele pode abrir ou fechar
parte do sistema eltrico. Tem funo de proteo na instalao, proteo contra curto
circuito ou sobre carga.
Para uma correta especificao devem ser obtidas suas caractersticas junto ao fornecedor.
Transformadores de Fora o transformador usado quando se faz necessrio uma
elevao da tenso para fins de transmisso e sub-transmisso, ou tambm reduzir o nvel
de tenso para efeito de distribuio e conseguir atingir as cargas menores.
Figura 2.1 - Dispositivo Eletrnico Inteligente (IED).
FONTE: PEREIRA, 2008.
Para - Raios - Equipamentos que tem a funo de proteo contra descargas atmosfricas,
resultantes do acumulo de cargas eltricas em uma nuvem e a conseqente descarga sobre
o solo ou qualquer estrutura que oferea condies favorveis a esta descarga (CREDER,
2002, p. 288)
20
2.3 Sistema Supervisrio
Um sistema Supervisory Control And Data Acquisition (SCADA) formado por terminais
remotos que coletam dados de campo e transmitem esses dados a uma estao principal por
meio de um sistema de comunicao. A estao principal exibe os dados adquiridos e tambm
permite que o operador execute tarefas de controle remoto (BAILEY, 2003, p 12).
No incio de sua utilizao (e ainda encontrados hoje em algumas indstrias), os primeiros
sistemas SCADA eram formados por painis nos quais as informaes eram apresentadas por
um conjunto de lmpadas e levadas at o referido painel por uma enorme quantidade de cabos
de dados. Todo este aparato no tinha um bom nvel de confiabilidade, pois eram
frequentemente encontrados vrios problemas no sistema de comunicao e pequena vida
til das lmpadas que queimavam e podiam gerar alarmes falsos.
Hoje, os sistemas SCADA utilizam modernas tcnicas computacionais que permitiram a
correo destes problemas.
Juntamente com os sistemas supervisrios os sistemas de comunicao acompanharam esta
evoluo de forma que, hoje, facilmente so encontrados sistemas com altssimos graus de
confiana.
Este resultado pode ser atribudo em primeiro lugar a toda pesquisa no que se diz respeito a
novas tcnicas de hardware e software, e a juno destes dois.
Na presena deste contexto acompanha-se a difuso dos sistemas supervisrios no ambiente
industrial, onde devido ao bom desempenho apresentado e crescente queda nos custos destes
equipamentos pode-se acompanhar a sua utilizao em larga escala.
21
2.4 O Controlado Lgico Programvel
O controlado Lgico Programvel, ou simplesmente CLP, do ingls Programmble Logic
Controller, definido por Georgini (2006, p 48, traduzido) como um dispositivo de estado
slido, um computador industrial capaz de armazenar instrues para aplicao de funes de
controle, alm de realizar lgicas, clculos, manipulao de dados e comunicao em rede,
utilizado no controle de sistemas automatizados.
Um CLP assim como um computador pessoal composto pelos seguintes componentes:
Unidade Central De Processamento(CPU) que responsvel pelas operaes matemticas,
mdulos de entrada e sada, mdulos de comunicao com outros equipamentos e por ltimo
o sistema de alimentao.
Para a programao dos CLPs sentiu-se a necessidade da construo de um padro que fosse
seguido pelos fabricantes. Esta padronizao comeou em 1979 quando o Internacional
Electrotechnical Commission, (IEC)
iniciou seus trabalhos com este propsito e como
resultado e temos hoje a IEC 61131 onde se encontra com divida em 5 partes sendo que
algumas ainda no finalizadas.
2.5 Linguagem De Programao De Clps
Em 1992 o IEC publica um conjunto de normas o qual estabelece padres para os
controladores programveis. Esta norma dividida em cinco partes, sendo a IEC 61131-3 a
parte que trata das linguagens de programao dos CLPs.
Entre as linguagens adotadas pela IEC 61131-3 esto: a Linguagem Ladder, Blocos de
Funo, texto estruturado, lista de instruo e a Linguagem Grafcet. Neste texto apenas ser
apresentado a Linguagem Ladder, por esta ser a linguagem de programao adotada neste
trabalho.
Linguagem Ladder
Os motivos que fazem a linguagem ladder ser uma das mais usada pela indstria so:
22
Apresentar grande facilidade de programao,
Ser uma linguagem grfica, baseada em desenhos,
Ser tradicionalmente conhecidos em projetos de comando de quadros eltricos.
Segundo MORAES (2007), a linguagem ladder uma linguagem grfica de alto nvel que se
assemelha ao esquema eltrico de um circuito de comando ou diagrama de contatos. Ainda
segundo MORAES (2007) nesta linguagem todos os tipos de instrues pertencem a dois
grandes grupos: as instrues de entrada e as de sada. As instrues de entradas so
responsveis por formular questionamentos, os quais so tratados com respostas pelas
instrues de sada, essas por sinal so ainda responsveis por executar algum tipo de ao.
A CPU do controlador executa todas as funes descritas pelas linhas de comando de forma
cclica, ou seja, comeando pela primeira passando por todas as intermediarias at a ltima
linha, para ento recomear o ciclo.
Para exemplificar os princpios de funcionamento desta linguagem vamos fazer o
acionamento de um motor por meio da linguagem grfica.
Figura 2.2 Aplicao Ladder.
Na figura 2.2, vemos logo a representao de um contato normalmente aberto (LIGA) e um
contato normalmente fechado (DESLIGA). Na pratica so os botes tipo push button,
largamente utilizados em circuitos de controles eltricos.
23
As instrues de entrada so os contatos normalmente aberto e normalmente fechado, a
instruo de sada, representado pelo smbolo abaixo da palavra LIGA_MOTOR da figura 2.2
o estado do motor acionado ou parado.
2.6 Desequilbrio De Tenso
O desequilbrio de tenso por definio a diferena entre a magnitude das tenses de fase de
circuitos polifsicos.
Em uma rede de distribuio podem ocorrer desequilbrios de naturezas distintas: como
assimetria da rede gerada pelos tipos de transformadores de distribuio utilizados, e tambm
na formar como esto conectadas as cargas nas fases e neutros da rede.
2.7 Fator de potncia
Fator de potncia definido como a relao entre a potncia ativa e a potncia aparente
consumidas por um dispositivo ou equipamento, independentemente das formas que as ondas
de tenso e corrente apresentem.
Ao alimentarmos uma carga resistiva ideal em corrente alternada verifica-se a que variao de
tenso e corrente se desenvolve da mesma maneira, quando essa situao ocorre podemos
dizer que a tenso est em fase com corrente (figura 2.3). Essa uma situao tpica onde
esto instaladas cargas resistivas idias.
24
Figura 2.3 Tenso em fase com Corrente.
No entanto, uma carga real pode ter componentes reativas capacitivas e ou indutivas. Quando
essas componentes se fazem presente observamos uma defasagem entre a corrente e a tenso,
(figura 2.4).
Conforme a componente que se apresenta de forma predominante duas situaes podem
ocorrer: a primeira a corrente estar adiantada em relao a tenso, a segunda a corrente
atrasada em relao a tenso.
Figura 2.4 Tenso e Corrente, defasadas.
25
Figura 2.5 Potncia Reativa.
O resultado da componente reativa da carga o aparecimento de uma potncia reativa no
circuito conforme mostrado pela figura 2.5. Diante desta situao o circuito passa a
consumir tambm essa potncia aparente que maior do que a que ele realmente necessita
para transformar em trabalho.
26
3 PRINCIPAIS TRABALHOS DESENVOLVIDOS
Devido importncia da energia eltrica na vida das pessoas e da indstria, muitos estudos
esto em desenvolvimento e consequentemente muitas publicaes nesta rea.
Muitos destes estudos enfatizam a economia de recursos, sendo esta economia obtida atravs
de operaes desassistidas em subestaes, ou pelo melhor aproveitamento dos equipamentos
j instalados.
Existe grande incentivo por parte de concessionrias de energia como a ELETROSUL
Centrais Eltricas, Compania Paulista de Fora e Luiz e Companhia Energtica de Minas
Gerais.
Observa-se o fornecimento por estas empresas de recursos como histricos de informaes,
recursos humanos e financeiros, fundamentais ao desenvolvimento de trabalhos de pesquisa.
Porm este mesmo fato no verificado em subestaes de mdia tenso. No sendo
facilmente encontrados trabalhos publicados com a finalidade de estudos em controle em
subestaes de media tenso na literatura.
Sero aqui apresentados dois exemplos destes trabalhos desenvolvidos, o primeiro no ano de
2002, onde o autor desenvolve um sistema de superviso para uma maquete com objetivos
didticos para os cursos de Engenharia de Controle e Automao e Eltrica. Em seguida outro
trabalho desenvolvido por dois engenheiros em uma indstria.
3.1 Paredes
Paredes em 2002, desenvolve um trabalho em uma subestao eltrica prottipo chamada
PowerNet1 instalada na Universidade Federal de Itajub (Unifei). Seu trabalho envolve o
desenvolvimento de um Software Supervisrio para a PowerNet1.
So utilizados por ele um Controlado Lgico Programvel GE-FANUC 9070, e o software de
superviso Citect.
27
O autor tem como objetivo implementar protees eltricas via software, que permitam a
visualizao de manobras, praticadas normalmente em subestaes de energia eltrica, e
tambm a parametrizao dos equipamentos usados para suporte ao ensino nas aulas prticas
nos cursos de Engenharia de Controle e Automao e Eltrica na Universidade Federal de
Itajub.
Neste trabalho ele aponta algumas das principais vantagens e desvantagens observadas depois
de concluda a implementao.
Vantagens:
Fcil manuseio do programa de superviso, o qual fornece uma ampla variedade de comandos
que permitem aos usurios a visualizao e melhor compreenso dos acontecimentos para
rpida anlise e tomada de decises e a possibilidade de implementar comandos automticos
de acordo com cada evento conhecido.
Desvantagens:
Devido a sua comunicao serial do controlado usado, a rapidez no envio de um comando
pode ter seu efeito de proteo atrasado, comprometendo desta forma o sistema, isto , podese evitar um prejuzo menor se pudesse obter um tempo de resposta menor. Todos os eventos
devem ser bem conhecidos, pois o sistema responde automaticamente queles que foram
programados.
O autor ainda classifica como razovel, o resultado de seu trabalho para os fins didticos
desejados.
3.2 Souto e Fonseca
Fonseca e Souto (2007) escreveram sobre um trabalho realizado em uma indstria. Neste
trabalho eles descrevem a arquitetura do sistema implantado, falam sobre os dispositivos
utilizados, a importncia do sistema de sincronismo e superviso.
No trabalho desenvolvido pelos engenheiros feita uma abordagem superficial sobre os itens
descritos acima, no sendo mencionados maiores detalhes como as caractersticas dos
dispositivos e softwares usados e tambm no so citados os resultados obtidos aps a
concluso do trabalho.
28
4 HIERARQUIA DA AUTOMAO INDUSTRIAL
Segundo Souza (2005) os sistemas de controle existentes at 1990 eram formadores de ilhas
de automao, onde se tratava separadamente cada setor, o qual possua o seu sistema de
controle independente e no integrado aos demais.
Um bom projeto de automao deve prever esta situao e evitar a formao destas ilhas,
favorecendo a integrao das informaes provenientes dos diversos nveis da empresa, desde
o cho de fabrica at os nveis gerenciais. Procedendo desta maneira os projetistas estaro
desempenhando de forma eficiente sua tarefa, realizando a automao dos negcios da
empresa como um todo e no apenas fornecendo uma soluo isolada de automao de alguns
processos ou equipamentos.
Para representar os nveis citados acima na figura 5.1 apresentada uma pirmide, onde
podemos escalonar os diversos nveis de automao encontrados em uma empresa. Estes
nveis so descritos de forma resumida nas prximas linhas.
Figura 4.1 - Pirmide de automao.
FONTE: People.
4.1 Sensores e atuadores - Nvel 1
Na base da pirmide encontramos o nvel 1, o mais baixo nvel de automao. Aqui os dados
so transmitidos em bits, nas chamadas redes de campo. A velocidade dessa transmisso, a
29
freqncia e a reao da ordem de milissegundos. So bons exemplos dos componentes
deste degrau os sensores de nvel, sensores de temperatura, sensores de velocidade, vlvulas,
inversores de freqncias entre outros.
4.2 CLP / SCADA Nvel 2
Elevando um degrau na pirmide apresentada, estaremos no nvel 2 o nvel dos CLPs e os
sistemas SCADA, onde so localizados os procedimentos de controle, objeto deste trabalho.
A partir daqui esto instaladas as redes ethernet, com velocidade de transmisso na ordem de
mega bits por segundo (Mbs) e com a funo de coleta dos dados gerados em campo. Estes
dados so tratados e armazenados em servidores.
Neste momento falamos em gerencia da planta. Todo acompanhamento do processo produtivo
pode ser realizado baseado nas informaes organizadas nesta camada. Informaes
tipicamente fornecidas neste nvel so os estados das variveis do processo e gerao de
alertas quando algum parmetro est fora do especificado. Desta maneira so facilmente
detectadas as origens de problemas, fazendo com que a resposta a esse problema seja rpida e
eficiente.
4.3 Gerncia de Informao Nvel 3
Avanando mais um degrau na nossa pirmide, chegamos ao nvel de gerencia de informao
onde esto instalados os Sistemas de Gerncia de Informao de Processos da empresa. Estes
sistemas so normalmente englobados pelo termo geral: Enterprise Production Systems (EPS)
e consistem em solues tecnolgicas com o objetivo de gerenciar todas as etapas de
produo.
Sua principal funo cobrir a deficincia de comunicao existente entre o cho de fbrica,
nvel 2, e os sistemas corporativos Enterprise Resource Planning (ERP) nvel 4. Sua
definio exposta no item 4.4.
30
4.4 MES Manufacturing Execution System
Termo com origem na lngua inglesa e que podemos traduzir como Sistema de Execuo da
Produo, um dos principais sistemas de gerencia de informao.
So algumas das funes que os sistemas MES costumam ter:
Importao de dados do sistema ERP: itens, estaes de trabalho, armazenagem, estoque,
planos da qualidade, dados de funcionrios, etc.
Importao de parmetros para a produo, como pedidos e prioridades de manufatura.
Emisso automatizada de instrues para que o armazm entregue o material nas clulas
de trabalho.
Exibio da fila de trabalho, instrues e documentao especfica para a clula de
trabalho, em funo das prioridades definidas anteriormente.
Armazenamento das informaes de atividades da produo: tempos de operao (por
operador), tempos de mquinas, componentes usados, material desperdiado, etc.
Instrues para reposio de material na linha de produo.
Armazenamento e divulgao dos dados de qualidade.
Instrues para que a continuidade do fluxo de materiais pela linha.
Monitoramento da produo em tempo real, e ajustes em todas as etapas conforme seja
necessrio.
Anlise de mtricas e desempenho da produo.
4.5 PIMS - Plant Information Management System
Basicamente, PIMS um software que contm um repositrio, onde so concentradas todas
as informaes relevantes das clulas de produo, diretamente ligadas aos sistemas de
superviso e controle. O PIMS coleta informaes dos sistemas de superviso, CLPs, Sistema
Digital de Controle Distribudo (SDCDs), sistemas legados e os armazena em uma base de
dados real time. Tal base tem caractersticas no encontradas nos bancos de dados
31
convencionais, como: grande capacidade de compactao (tipicamente de 10:1) e alta
velocidade de resposta a consulta em sua base histrica. Devido a isto, capaz de armazenar
um grande volume de dados com recursos mnimos, se comparado s solues convencionais.
4.6 Sistemas Integrados de Gesto - Nvel 4
Nos ltimos anos, os sistemas integrados de gesto, ou ERP, passaram a ser largamente
utilizados pelas empresas. So sistemas genricos capazes de integrar todas as informaes
que fluem pela empresa por intermdio de uma base de dados nica (MENDES 2002).
Dentre as informaes integradas por estes sistemas esto as de aspecto funcional da empresa
como finanas, contabilidade, recursos humanos, fabricao, marketing, vendas, compras,
manuteno etc. e tambm os aspectos estruturais e administrao da empresa como o sistema
de processamento de transaes, sistemas de informaes gerenciais, sistemas de apoio a
deciso entre outros.
Vantagens do uso de Sistemas Integrados de Gesto
Eliminar o uso de interfaces manuais,
Reduzir custos,
Otimizar o fluxo da informao e a qualidade da mesma dentro da organizao
(eficincia),
Otimizar o processo de tomada de deciso,
Eliminar a redundncia de atividades,
Reduzir os limites de tempo de resposta ao mercado.
32
5 METODOLOGIA
5.1 Embasamento terico
Para iniciar este trabalho, foi feita uma pesquisa na literatura com a inteno de reunir
informaes e conceitos necessrios para dar suporte ao embasamento terico do trabalho.
Foram consultados livros, artigos publicados em revistas especializados, dissertaes de
mestrado e doutorado e sites da internet.
Este trabalho de pesquisa e reviso bibliogrfica foi de extrema importncia, visto que os
resultados obtidos se baseiam nas informaes reunidas nesta etapa do trabalho.
5.2 Desenvolvimento prtico
Em um segundo momento para desenvolvimento prtico do trabalho, o software supervisrio
e a programao do CLP, foram buscadas informaes junto a seus respectivos fabricantes.
Sendo estas informaes disponveis em manuais, tutoriais, apostilas de cursos das
ferramentas e no servio de atendimento disponibilizado pelo fabricante.
Foi escolhido o sistema supervisrio Elipse Scada para desenvolvimento do supervisrio. Esta
escolha se deu pela universidade dispor de uma licena desta ferramenta e pelo material de
apoio disponvel.
Foi escolhido o CLP da GE Fanuc srie Versamax, em primeiro lugar por este dispositivo ser
bem conceituado pelo mercado, e em segundo lugar pela disponibilidade deste controlador no
laboratrio de Controle e Automao da Universidade Federal de Ouro Preto (UFOP).
Para a programao do Versamax, foi usado o Proficy Machine Edition 5.9, pela universidade
dispor de uma licena deste software e tambm por ele ser disponibilizado pelo laboratrio.
33
5.3 Testes de conformidade
Para a realizao de testes de conformidade com os requisitos foram utilizadas simulaes
computacionais disponibilizados pelos prprios softwares de desenvolvimento e um
simulador de circuitos eletrnicos para o sensor desenvolvido.
Tambm foi construda uma maquete com o objetivo de confrontar os resultados obtidos pela
fase de simulao e implementao prtica com os resultados tericos.
Nesta maquete foram conectados o CLP e o software supervisrio, e a partir dos resultados
obtidos com este acoplamento do ser apresentada uma avaliao que ser feita levando em
considerao requisitos funcionais expostos no item 1.5 do capitulo 1.
34
6 A MAQUETE
O desenvolvimento de um sistema de controle para ser aplicado no secundrio de um
transformador em sua etapa de projeto tem a necessidade de realizao de uma srie de testes
para que sua eficincia seja certificada.
Considerando os altos custos associados aquisio de equipamentos de alta e mdia
potncia, considerando tambm o fator segurana de operao e principalmente a necessidade
de suspenso temporria das atividades nos setores por ele abastecidos foi feita a opo de
construir de uma maquete o que possibilita verificar situaes de baixo fator de potncia e
desbalanceamento entre fases em escala normal de tenso.
Esta maquete foi construda em media tenso, 127 V e baixa potncia 80 W (valores nominais
dos equipamentos).
Os materiais e equipamentos utilizados na construo da maquete foram:
Um sensor, para deteco de defasagem entre tenso e corrente,
Cargas indutivas (03 Ventiladores),
Cargas resistivas (02 Banco de lmpadas),
04 bancos de capacitores,
Uma prancha de madeira, (suporte para o painel),
08 Botes tipo Push Button ( com reteno),
Bornes para conexes,
Reles de bobinas (acionamento em12 V),
Microcomputador (rodando o Sistema Supervisrio),
CLP GE Fanuc,
01 Disjuntor trifsico.
Os materiais citados acima foram fixados em um painel de madeira como mostrado na
figura 6.1.
35
As cargas indutivas (trs ventiladores) foram alocadas na parte superior do painel para evitar
acidentes e foram alinhadas horizontalmente. As lmpadas verde e azul, observadas a direita
formam o primeiro banco de lmpadas, o segundo formado pelas lmpadas vermelha e a
verde localizadas a esquerda.
Na parte inferior a esquerda pode ser visto o sistema de alimentao e proteo composto
pelos disjuntores.
Na parte central inferior encontram-se os botes, cada boto responsvel pelo acionamento
de uma carga, sendo utilizados cinco dos oito disponveis. Para efeito de expanses foram
previstos e reservados trs botes adicionais.
E por ultimo, visto na parte inferior direita encontram-se os bornes, responsveis pelas
conexes eltricas. A eles so levados os sinais dos botes para seguir at o CLP, e nele
chegam os comandos vindos do CLP para o acionamento dos reles que esto na parte traseira
do painel.
Figura 6.1 - Montagem da maquete no Painel.
36
O diagrama eltrico mostrado na figura 6.2 a representao no sensor reduzido a uma fase e
a figura 6.3 mostra o circuito, montado em uma matriz de contatos.
Figura 6.2 Diagrama Eltrico do circuito para uma fase.
Figura 6.3 - Circuito Montado na Matriz de Contatos
37
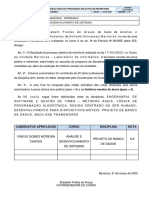
7 A PROGRAMAO DO CLP
Todo o trabalho de programao foi desenvolvido para o controlador VersaMax, o qual
mostrado pela figura 7.1, nele foram inseridas a programao referente a correo do Fator de
Potncia e Balanceamento de Cargas.
Figura 7.1 CLP GeFanuc VersaMax.
7.1 Correo FP
A tcnica usada para realizar a correo do fator de potncia tem como base uma anlise
prvia das cargas instaladas. Desta maneira foi feito o clculo dos bancos de capacitores e
feita tambm uma diviso em quatro faixas, sendo elas: 0<FP<= 62, 62< FP<= 72, 72 < FP<=
82, 82<FP<=92.
O CLP recebe, atravs de uma de suas entradas analgicas, os dados de defasagem entre
tenso e corrente (medidos em mili segundos). De posse destes dados o CLP realiza uma serie
de clculos e retorna os valores instantneos do Fator de Potncia. Com base nesta informao
e nas quatro faixas de correo, o programa decide quais os bancos de capacitores sero
inseridos nos sistema eltrico.
38
Tambm determinado um tempo para estabilidade do sistema, no permitindo que a
verificao seja feita a todo ciclo de clock do CLP, evitando que o sistema entre em um loop
infinito.
Aps o processamento destas informaes o CLP envia ao sistema supervisrio valores
instantneos de fator de potncia, os quais so apresentados no capitulo 8.
7.2 Balanceamento de Cargas
A tcnica utilizada para desenvolvimento do programa no CLP foi baseada no algoritmo de
trs fases, desenvolvido por Deus (2007).
O balanceamento garantido pelo conhecimento prvio da corrente de cada carga e a deciso
alocar a carga na fase A, B ou C tomada antecipadamente, ou seja, antes da carga ter sido
acionada.
Podemos dividir o algoritmo em alguns passos:
Passo 01 feito a verificao da quantidade de corrente que circula por cada uma das
trs fases, o clculo da corrente mdia ideal, e calculado o grau de desbalanceamento em
cada fase medido em porcentagem.
Passo 02 feito a verificao de qual das fases possui a menor quantidade de corrente,
isso definir onde ser alocada a prxima carga que faa uma requisio de entrada.
Passo 03 feito a monitorar as solicitaes de acionamento de novas cargas, verificado
uma solicitao o sistema procede enviando o comando para que a carga possa ser
efetivamente acionada.
Passo 04 feito o monitoramento das solicitaes de desligamento das cargas,
verificado esta solicitao procede enviando o comando para que a carga possa ser
efetivamente desligada.
Passo 05 depois de verificado o desligamento de uma fase, fazer a realocao das cargas
que esto em funcionamento de forma a promover um estado de balanceamento mais
prximo da corrente ideal.
39
Para os passos de nmero 01, 02 e 03 foram desenvolvidos alguns procedimentos baseado
no algoritmo de trs fases, e foi inserida na programao do CLP. Os passos 04,05 no
foram efetivamente implantados no controlador.
40
8 O SUPERVISRIO
O supervisrio incorpora a funcionalidade de IHM (Interface Homem Mquina), o software
esta em constante comunicao com o CLP, lendo suas variveis, armazenando-as em uma
base de dados simples e apresentando seus valores instantneos em uma tela de uma forma
bastante intuitiva conforme visto na figura 8.1.
Nesta figura podemos ver as informaes resumidas de corrente, tenso, potncia e fator de
potncia no secundrio dos trs transformadores de uma subestao.
possvel tambm aos usurios do software a navegao entre as diversas telas, tendo acesso
a todas as informaes em tempo real.
Foi desenvolvida tambm uma tela especfica para cada transformador, onde cada varivel
exibida com mais detalhes, figura 8.2.
Figura 8.1 Tela transformadores.
41
Figura 8.2 - Detalhes do Transformador A.
Nesta tela temos acesso ao histrico de cada varivel, com seus valores plotados em um
grfico. Temos tambm acesso a uma tela para gerao de relatrios (figura 8.3) histrico
(figura 8.4), podendo especificar dia e hora de incio e fim.
Dados monitorados: corrente na fase, corrente mdia ideal, diferena entre a corrente que
circula na fase e a ideal e tambm o grau de desbalanceamento em porcentagem.
Figura 8.3 Tela Relatrio.
42
Figura 8.4 - Tela Histrico.
Figura 8.5 - Tela Balanceamento de Cargas.
Para os dados referentes ao desbalanceamento de cargas foi feita tambm uma tela especifica,
mostrada na figura 8.5.
Nela mostrada a corrente em cada fase, a corrente media ideal e o grau de
desbalanceamento.
43
9 ANLISE E RESULTADOS
Para compor a anlise dos resultados e simplificar a apresentao, feita uma diviso entre
dados e resultados de fator de potncia e balanceamento de cargas.
Inicia-se esta anlise e so feitos alguns comentrios no que se refere aos dados de correo
do o fator de potncia e posteriormente o mesmo procedimento repetido ao trabalho feito
com o balanceamento de cargas.
Foram realizados testes com o sistema de controle desenvolvido em duas configuraes
diferentes, sendo elas alimentao do circuito de cargas com 12 V e 127 V.
Na primeira com as cargas foram alimentadas com 12 V, observa-se o funcionamento estvel
do sensor desenvolvido como pode ser comprovado pelo quadro 9.1.
Quadro 9.1 - Cargas Tempo defasagem.
CARGAS
TEMPO (ms)
Indutiva
Capacitiva
Osciloscpio
Sensor
01 Ventilador
2,000
1,98
02 Ventilador
2,240
2,23
03 Ventilador
2,400
2,65
01 Ventilador
2,2 F
1,200
1,1
01 Ventilador
2 x (2,2 F)
0,006
0,0048
Como no estava disponvel o sistema de comunicao entre o sensor e o CLP, o
funcionamento do sistema de controle no pode ser verificado em conjunto com a maquete.
Na segunda configurao foi feita uma alterao no circuito do sensor de forma que se
consiga realizar leituras na tenso de rede (127 V). Em funo desta alterao foi observada a
interferncia de uma grande quantidade de rudos, o que tornou impossvel realizar as
medidas tanto no osciloscpio quanto no sensor.
44
O resultado obtido para a questo do balanceamento de cargas est diretamente vinculado
com a descrio feita no item 7.2.
Para as funes que o CLP estava programado, que foram leitura da quantidade de corrente
em cada fase, calculo do desbalanceamento efetivo e a alocao de novas cargas ao sistema. A
resposta obtida alcanou as expectativas, pois todas as requisies de entrada de novas cargas
foram alocadas na fase que se apresentava com a menor quantidade de corrente, e aps a
alocao da nova carga o calculo do grau de desbalanceamento foi refeito.
Da mesma forma que o controlador, o supervisrio se comportou de maneira estvel,
informando em tempo real todas as modificaes introduzidas tanto na fase de simulao
quanto nos testes realizados na maquete.
45
10 CONCLUSES E SUGESTES PARA TRABALHOS
FUTUROS
Sendo este trabalho uma das partes de um trabalho mais amplo que envolveu o
monitoramento e correo dinmica do Fator de Potncia e tambm o complexo problema do
monitoramento e balanceamento de cargas, foi dado um maior enfoque na construo de um
Sistema Supervisrio, deforma a contribuir com o objetivo global que segue na linha do uso
eficiente de energia eltrica.
Atualmente muitas discusses so levantadas no que se refere a questes ambientais,
qualidade e eficincia de energia.
Quanto a conscincia ambiental, o sistema supervisrio para monitoramento e controle de
fator de potncia e balanceamento de cargas, desenvolvido neste trabalho, quando bem
aplicado pode contribuir de uma forma significativa para o uso eficiente da energia
disponvel, evitando que seja necessrio um constante aumento na gerao de energia eltrica,
principalmente a hidro eltrica que representa grande parte da energia produzida no brasil.
Atualmente o balanceamento de cargas em um sistema eltrico realizado apenas no
momento da utilizao do sistema eltrico. Ele no foi incorporado na concepo do projeto.
Quando falamos em qualidade e eficincia da energia eltrica provenientes de um
balanceamento de cargas, muitos so os trabalhos desenvolvidos de forma terica,
principalmente com estudos de algoritmos, porm no foi encontrado nenhum trabalho que
tenha como objetivo realizar uma implementao de um destes algoritmos. Desta maneira
podemos dizer que este trabalho se representa um passo inicial do que pode ser entendido
como o futuro dos projetos de sistemas eltricos, com resultados tmidos, no entanto muito
promissores.
De posse do enorme potencial dos resultados obtidos com a concluso deste trabalho e
visando os benefcios que sero alcanados com a incluso de alguns refinamentos, neste
momento so identificadas e propostas alguns linhas de pesquisas para novos trabalhos.
46
Estas linhas de pesquisas so apresentadas com o objetivo de acrescentar melhorias que viro
contribuir, de forma bastante expressiva para viabilizar o projeto e desenvolvimento de novas
solues industriais estveis, de baixo custo e com uma grande relevncia ambiental.
Implementao da comunicao: Sistema de medio desenvolvido - CLP.
De posse do sistema de mediao desenvolvido, necessrio que seja feita a implementao
da transferncia das informaes do sensor para o CLP, isto conseguido substituindo o
micro controlador usado no prottipo por outro que oferea um modulo adicional de sada
analgica.
Estudo de algoritmos baseados em otimizao combinatria.
bem vindo o uso de algoritmos faam uso de otimizao combinatria para realizar a troca
de cargas entre fases e a rotatividade dos bancos de capacitores. Isto contribui para o aumento
da vida til do sistema.
Estudo do comportamento de banco de capacitores de elevada potncia.
A introduo de banco de capacitores para a correo do fator de potncia em sistemas de
elevada potncia traz alguns inconvenientes para o sistema eltrico, portanto necessrio que
se faam estudos para minimizar estes efeitos.
Este aprimoramento torna o sistema mais flexvel, possibilitando sua utilizao tanto em
sistemas de baixa quanto em altas potncias.
Certificao do sensor em protocolos de rede de comunicao estabelecidos.
O requisito comunicao sem duvida um dos mais importantes em termos de projeto.
Portanto uma linha de pesquisa proposta que talvez seja a mais ambiciosa realizar estudos e
implantar as alteraes necessrias ao sensor desenvolvido, para que ele seja compatvel com
os padres de comunicao estabelecidos internacionalmente tais como Fieldbus, Devicenet
entre outros.
Esta certificao traria flexibilidade programao de controladores de vrios fabricantes, e
tornaria possvel a sua implantao em locais onde j exista algum tipo de sistema de
controle.
47
REFERNCIAS BIBLIOGRFICAS.
ANDRADE, M. O. A influncia da energia eltrica reativa no planejamento do setor
eltrico e a necessidade de consolidao do perodo horrio para avaliao do fator de
potncia das cargas, 1993.
BAILEY, D. Practical Scada For Industry. Austrlia, 2003.
BRANCO, C. S. A energia e a Econmica Brasileira. So Paulo: Editora Pioneira, 1983.
BUENO, D.; CASTRO, N. J. Sntese analtica do PDEE 2006-2015. 2006
CALABI, A. S. A energia e a Economia Brasileira. So Paulo: Editora Pioneira, 1983.
CREDER, Hlio. Instalaes Eltricas. 14 ed. Rio de Janeiro: Editora LTC, 2006.
DEUS, R B. Sistemas de Controle para Balanceamento de Fases Eltricas. 2007.
FURNAS. Anurio Estatstico. 2008. Disponvel em <http://www.furnas.com.br>. Acesso
em 12 de set de 2008.
GEORGINI, M. Automao Aplicada Descrio e Implementao de Sistemas
Seqenciais com CLPs. 6. ed. So Paulo: Editora Erica 2006.
MENDES, J V; Filho E E. Sistemas Integrados de Gesto ERP em pequenas empresas:
um confronto entre o referencial terico e a prtica empresarial. 2002.
MORAES, C. C.; CASTRUCCI, P. L. Engenharia de Automao Industrial. 2 ed. Rio de
Janeiro: Editora LTC, 2007.
PEOPLE. Disponvel em <http://www.people-team.com/empresa.htm>. Acesso em 20 de set
2009.
PEREIRA, R. M.; SPRITZER, I. M. P. Automao e Digitalizao em subestaes de
energia eltrica: um estudo de caso. Paran, 2008.
SANTOS, G. A. G.; BARBOSA, E. K.; SILVA, J. F. S.; ABREU, R. S. Por que as Tarifas
Foram para os Cus? Propostas para o Setor Eltrico Brasileiro. 2008.
SILVA, A. P.; SALVADOR, M. O que so sistemas supervosrios?. 2004.
SILVA, M. J. G.; PALOMA, F. M. P.; COSTA, R. C. Digitalizao de uma subestao de
energia eltrica: estudo de uma metodologia de arquitetura para especificao tcnica.
2006.
SOUTO, A. O. F.; OLIVEIRA, M. Automao de subestaes industriais. 2007
SOUZA, A. J. Gerncia de informao de processos industriais: Um estudo de caso na
produo de petrleo e gs. 2005.
Vous aimerez peut-être aussi
- B12 04 TicoDocument2 pagesB12 04 TicostgpereiraPas encore d'évaluation
- Curso de Automação Industrial Utilizando o CLP Haiwell - Aula 1Document16 pagesCurso de Automação Industrial Utilizando o CLP Haiwell - Aula 1stgpereiraPas encore d'évaluation
- Backup No Software A1: Boletim Técnico R&D - 01/09 24 de Março de 2009Document7 pagesBackup No Software A1: Boletim Técnico R&D - 01/09 24 de Março de 2009stgpereiraPas encore d'évaluation
- Manual - Ces-0200 - v3.9Document8 pagesManual - Ces-0200 - v3.9stgpereiraPas encore d'évaluation
- B14 04 - TCP Ip PDFDocument12 pagesB14 04 - TCP Ip PDFstgpereiraPas encore d'évaluation
- b12 07Document5 pagesb12 07stgpereiraPas encore d'évaluation
- b11 04Document4 pagesb11 04stgpereiraPas encore d'évaluation
- b11 04 PDFDocument4 pagesb11 04 PDFstgpereiraPas encore d'évaluation
- Programação On-Line para o Software A1: Boletim Técnico R&D - 04/08 18 de Março de 2008Document6 pagesProgramação On-Line para o Software A1: Boletim Técnico R&D - 04/08 18 de Março de 2008stgpereiraPas encore d'évaluation
- Controlador programável com IHM incorporada série ExpertDocument115 pagesControlador programável com IHM incorporada série ExpertmigajrPas encore d'évaluation
- Atualização WinSUP v2.53Document6 pagesAtualização WinSUP v2.53stgpereiraPas encore d'évaluation
- Manual ConversoftDocument40 pagesManual ConversoftEduardo FasciniPas encore d'évaluation
- Algoritmo PID Padrão ISA: Boletim Técnico EP3 - 05/04 17 de Março de 2004Document5 pagesAlgoritmo PID Padrão ISA: Boletim Técnico EP3 - 05/04 17 de Março de 2004stgpereiraPas encore d'évaluation
- B14 04 - TCP IpDocument12 pagesB14 04 - TCP IpstgpereiraPas encore d'évaluation
- Programação LadderDocument25 pagesProgramação LadderTheFeXPas encore d'évaluation
- Doctecnico RedesDocument44 pagesDoctecnico RedesClayton MouraPas encore d'évaluation
- Atualização WinSUP v2.53Document6 pagesAtualização WinSUP v2.53stgpereiraPas encore d'évaluation
- M 400472 D 100 PDocument27 pagesM 400472 D 100 PstgpereiraPas encore d'évaluation
- M FpsoftDocument69 pagesM FpsofttridentazulPas encore d'évaluation
- 1 Tutorial COBENGEDocument9 pages1 Tutorial COBENGEstgpereiraPas encore d'évaluation
- Curso de Controladores Lógicos Programáveis - CLPDocument37 pagesCurso de Controladores Lógicos Programáveis - CLPHumberto Costa95% (39)
- Curso CLP Básico PanasonicDocument138 pagesCurso CLP Básico PanasonicFernando SilvaPas encore d'évaluation
- IHMs CLPs f4004pDocument6 pagesIHMs CLPs f4004pstgpereiraPas encore d'évaluation
- Mwebserver 110 PDocument90 pagesMwebserver 110 PstgpereiraPas encore d'évaluation
- M 400472 MP 110 PDocument27 pagesM 400472 MP 110 PstgpereiraPas encore d'évaluation
- Terminal IHM EXPERTDocument53 pagesTerminal IHM EXPERTphomixPas encore d'évaluation
- 2345.10 / 4004.78 Conversor Ethernet / Serial Transparente Ref. 3-0056.110 Manual Rev. 1.10 Agosto/2004Document31 pages2345.10 / 4004.78 Conversor Ethernet / Serial Transparente Ref. 3-0056.110 Manual Rev. 1.10 Agosto/2004stgpereiraPas encore d'évaluation
- Code BlocksDocument13 pagesCode BlocksstgpereiraPas encore d'évaluation
- O Que É Calibração Rastreado RBC Inmetro - TecnoferramentasDocument4 pagesO Que É Calibração Rastreado RBC Inmetro - TecnoferramentasstgpereiraPas encore d'évaluation
- Conteúdo Mínimo Dos Certificados de Calibração - Blog Da QualidadeDocument4 pagesConteúdo Mínimo Dos Certificados de Calibração - Blog Da QualidadestgpereiraPas encore d'évaluation
- CLG535R: Características técnicas de hardware e softwareDocument6 pagesCLG535R: Características técnicas de hardware e softwareHudsonPas encore d'évaluation
- Impactos socioculturais do turismoDocument19 pagesImpactos socioculturais do turismobeto100% (1)
- Como se tornar um FilósofoDocument44 pagesComo se tornar um FilósofoEuclidesdaSilva57% (7)
- Relatório Tempo de PegaDocument6 pagesRelatório Tempo de PegacamilafernandescofPas encore d'évaluation
- Análise Institucional LourauDocument2 pagesAnálise Institucional LourauMatheus SantosPas encore d'évaluation
- 10 Ano Geologia A Terra e Os Seus Subsistemas em Interaco 1223034690877732 8Document34 pages10 Ano Geologia A Terra e Os Seus Subsistemas em Interaco 1223034690877732 8pelosirosnanetPas encore d'évaluation
- NR 35 - ResumoDocument13 pagesNR 35 - ResumoCarol AlvesPas encore d'évaluation
- Alem Dos Muros Da EscolaDocument30 pagesAlem Dos Muros Da Escolasilvinharicci67% (3)
- Jogos de Invasão ArtigoDocument19 pagesJogos de Invasão ArtigoBrenno Alves GualbertoPas encore d'évaluation
- Edital para Resultado de Processo Seletivo de MonitoriaDocument1 pageEdital para Resultado de Processo Seletivo de MonitoriaFilipe MendesPas encore d'évaluation
- Construindo uma torre de espagueteDocument21 pagesConstruindo uma torre de espagueteBrunoPas encore d'évaluation
- Ventosaterapia para dores muscularesDocument15 pagesVentosaterapia para dores muscularesDaniel Da Silva LimaPas encore d'évaluation
- Psicologia GeralDocument2 pagesPsicologia GeralAli Braz Momade MucopotoPas encore d'évaluation
- Kryon11 Ext PTDocument29 pagesKryon11 Ext PTSampaio JoãoPas encore d'évaluation
- Foucault GovernabilidadeDocument2 pagesFoucault GovernabilidadeanacandidapenaPas encore d'évaluation
- Sinopse Zoológica dos InvertebradosDocument32 pagesSinopse Zoológica dos InvertebradosIcaro PereiraPas encore d'évaluation
- APECA - Exemplo RFAIDocument277 pagesAPECA - Exemplo RFAIOsvaldo DiasPas encore d'évaluation
- Prova de Língua Portuguesa sobre interpretação textual e uso da vírgulaDocument2 pagesProva de Língua Portuguesa sobre interpretação textual e uso da vírgulaAlessandra PiresPas encore d'évaluation
- Ensino da alfabetização no BrasilDocument10 pagesEnsino da alfabetização no BrasilLúcia SchermackPas encore d'évaluation
- Recuperação Da Barragem Do Gama Por Meio de Cutoff em Jet GroutingDocument10 pagesRecuperação Da Barragem Do Gama Por Meio de Cutoff em Jet GroutingMax Gabriel Timo BarbosaPas encore d'évaluation
- CNAB - Parametrização e ProcessosDocument72 pagesCNAB - Parametrização e ProcessosCarlos BarbosaPas encore d'évaluation
- Dissídio Retroativo - Cálculos INSS, FGTS e geração da SEFIPDocument7 pagesDissídio Retroativo - Cálculos INSS, FGTS e geração da SEFIPLeopoldoLealPas encore d'évaluation
- Artigo Tese Doutorado Ricardo Wallace 2016Document10 pagesArtigo Tese Doutorado Ricardo Wallace 2016api-355035635Pas encore d'évaluation
- Libras - Atividade 3Document1 pageLibras - Atividade 3Lorena ReisPas encore d'évaluation
- Quesitos em Medicina LegalDocument18 pagesQuesitos em Medicina LegalTen_SevalhoPas encore d'évaluation
- Educação Especial E Inclusiva E Neuropsicopedagogia Institucional E Clínica 800 HorasDocument2 pagesEducação Especial E Inclusiva E Neuropsicopedagogia Institucional E Clínica 800 Horaseasports maax0% (1)
- Cinesioterapia - Aula 01pptDocument18 pagesCinesioterapia - Aula 01pptPriscila Scott Gomes100% (1)
- Conservação e Eficácia EnergéticaDocument25 pagesConservação e Eficácia EnergéticaGabriel Vieira de AlmeidaPas encore d'évaluation
- Moçambique: País da África OrientalDocument9 pagesMoçambique: País da África OrientalDominique Benjamim de MándiPas encore d'évaluation
- Parametros Da Educação EJA Pernambuco.Document72 pagesParametros Da Educação EJA Pernambuco.Nah Costa0% (1)