Vous aimerez peut-être aussi
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- JLG G10-55A SN 0160045636 & After Telehandler Parts Manual PDFDocument418 pagesJLG G10-55A SN 0160045636 & After Telehandler Parts Manual PDFcruz100% (4)
- MIG Welding Tips and TechniquesDocument3 pagesMIG Welding Tips and TechniquesQA QCPas encore d'évaluation
- Richard Haskell - Intro To Digital DesignDocument111 pagesRichard Haskell - Intro To Digital DesignTony Wong100% (1)
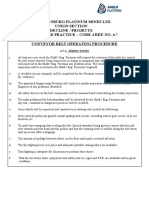
- 4.7 Conveyor Belt Operating ProcedureDocument3 pages4.7 Conveyor Belt Operating Procedurejohnson OlubiPas encore d'évaluation
- 格特威英文样本2018 PDFDocument56 pages格特威英文样本2018 PDFBinxiang XuPas encore d'évaluation
- Tanker Pipeline SystemsDocument22 pagesTanker Pipeline SystemsLogovaz91% (11)
- GME TAR Book Comp WiseDocument117 pagesGME TAR Book Comp WiseOm Prakash RajPas encore d'évaluation
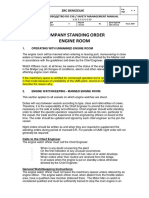
- Company Standing Order Engine RoomDocument4 pagesCompany Standing Order Engine Roomreka Shipping0% (1)
- IEEE 525-2007 Design and Installation of Cable Systems in SubstationDocument47 pagesIEEE 525-2007 Design and Installation of Cable Systems in SubstationSeahlkPas encore d'évaluation
- A Survey On Mobile Anchor Node AssistedDocument24 pagesA Survey On Mobile Anchor Node AssistedTarik KazazPas encore d'évaluation
- Are PLLs Dead - A Tutorial On KalmanDocument31 pagesAre PLLs Dead - A Tutorial On KalmanTarik KazazPas encore d'évaluation
- NLOS Identification and Weighted Least-Squares LocalizationDocument14 pagesNLOS Identification and Weighted Least-Squares LocalizationTarik KazazPas encore d'évaluation
- Low Bit-Rate Satellite DemodulatorDocument4 pagesLow Bit-Rate Satellite DemodulatorTarik KazazPas encore d'évaluation
- Multidimensional ScalingDocument19 pagesMultidimensional ScalingTarik KazazPas encore d'évaluation
- Coding Mask Design For Single Sensor PDFDocument16 pagesCoding Mask Design For Single Sensor PDFTarik KazazPas encore d'évaluation
- A Survey On Multicarrier CommunicationsDocument27 pagesA Survey On Multicarrier CommunicationsTarik KazazPas encore d'évaluation
- Multi-Channel Distance Measurement With ZigBeeDocument15 pagesMulti-Channel Distance Measurement With ZigBeeTarik KazazPas encore d'évaluation
- Coherent Processing and Superresolution Technique PDFDocument11 pagesCoherent Processing and Superresolution Technique PDFTarik KazazPas encore d'évaluation
- Slaa 013Document22 pagesSlaa 013Tarik KazazPas encore d'évaluation
- Channel Estimation For Localization PDFDocument6 pagesChannel Estimation For Localization PDFTarik KazazPas encore d'évaluation
- An Introduction To Compressive Sensing 5.12Document118 pagesAn Introduction To Compressive Sensing 5.12Tarik KazazPas encore d'évaluation
- Normal DistributionDocument45 pagesNormal DistributionTarik KazazPas encore d'évaluation
- DelPeral ICSSC 2013Document11 pagesDelPeral ICSSC 2013Tarik KazazPas encore d'évaluation
- Research Article: Time-Delay Estimation in Dispersed Spectrum Cognitive Radio SystemsDocument10 pagesResearch Article: Time-Delay Estimation in Dispersed Spectrum Cognitive Radio SystemsTarik KazazPas encore d'évaluation
- Measurement and Analysis of The Indoor Radio Channel in The Frequency DomainDocument5 pagesMeasurement and Analysis of The Indoor Radio Channel in The Frequency DomainTarik KazazPas encore d'évaluation
- Design AXI-lite Slave PeripheralDocument26 pagesDesign AXI-lite Slave PeripheralTarik KazazPas encore d'évaluation
- Spectrum Analysis Basics Agilent 5952-0292Document89 pagesSpectrum Analysis Basics Agilent 5952-0292moenobodyPas encore d'évaluation
- 2006-SNUG-Boston Standard Gotchas PresentationDocument20 pages2006-SNUG-Boston Standard Gotchas PresentationDishant S. RajputPas encore d'évaluation
- Getting Started GuideDocument40 pagesGetting Started GuideTarik KazazPas encore d'évaluation
- 4468 20 Zynq ArchitectureDocument40 pages4468 20 Zynq ArchitectureTarik KazazPas encore d'évaluation
- p36 JacobsDocument7 pagesp36 JacobsTarik KazazPas encore d'évaluation
- White Paper: Transferring High-Speed Data Over Long Distances With Combined FPGA and Multichannel Optical ModulesDocument7 pagesWhite Paper: Transferring High-Speed Data Over Long Distances With Combined FPGA and Multichannel Optical ModulesTarik KazazPas encore d'évaluation
- Comnet WorkloadDocument17 pagesComnet WorkloadTarik KazazPas encore d'évaluation
- p36 JacobsDocument7 pagesp36 JacobsTarik KazazPas encore d'évaluation
- UbnpathlDocument1 pageUbnpathlTarik KazazPas encore d'évaluation
- 696792982Document5 pages696792982Tarik KazazPas encore d'évaluation
- CCTC 20Document5 pagesCCTC 20Tarik KazazPas encore d'évaluation
- Legrand Main Price List April 2023Document268 pagesLegrand Main Price List April 2023anuvindanuvindPas encore d'évaluation
- Aluminum IP65 Single Point Load CellDocument3 pagesAluminum IP65 Single Point Load CellNarciso LopesPas encore d'évaluation
- Mech 203 Auto Differential Transmission ProjectDocument29 pagesMech 203 Auto Differential Transmission ProjectYugi SupriatnaPas encore d'évaluation
- Measuring Output Ripple An-1144Document8 pagesMeasuring Output Ripple An-1144anon_444314615Pas encore d'évaluation
- Fosmon 4-In-1 Charging Dock For Nintendo Switch Joy-Con Controller With LED IndicatorDocument2 pagesFosmon 4-In-1 Charging Dock For Nintendo Switch Joy-Con Controller With LED Indicatorhenry sarmientoPas encore d'évaluation
- Marzo 2022 plan Mar codigos y descripciones de piezasDocument11 pagesMarzo 2022 plan Mar codigos y descripciones de piezasGuadaLuphe FLoorezzPas encore d'évaluation
- LT1275X3 NCAT Service GuideDocument118 pagesLT1275X3 NCAT Service GuidejustmerrillPas encore d'évaluation
- AOPEN Embedded PC BrochureDocument12 pagesAOPEN Embedded PC BrochurepaulaPas encore d'évaluation
- Genio E550g User ManualDocument140 pagesGenio E550g User ManualAlbert LugoPas encore d'évaluation
- Motor Trifasico Ms6324 018kw TechtopDocument1 pageMotor Trifasico Ms6324 018kw TechtopVivianne catalina Muñoz roaPas encore d'évaluation
- ABT GolfDocument2 pagesABT GolfKhairul Nazmi Zainol AriffinPas encore d'évaluation
- Ae1390y Aa1aDocument2 pagesAe1390y Aa1aAnderson LuizPas encore d'évaluation
- Hg43au800aw SpecDocument8 pagesHg43au800aw SpecG & M Soft Technologies Pvt LtdPas encore d'évaluation
- Oil Module: C F D H ADocument2 pagesOil Module: C F D H Adaniel_jorge_10Pas encore d'évaluation
- 6 BLP Spesifikasi Teknis NOC 14920Document3 pages6 BLP Spesifikasi Teknis NOC 14920Ka BudiKaPas encore d'évaluation
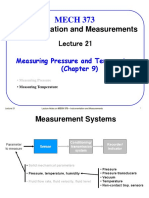
- L21 TemperatureDocument17 pagesL21 Temperaturebaraniinst6875Pas encore d'évaluation
- Panasonic CS-SA12CKP User ManualDocument11 pagesPanasonic CS-SA12CKP User ManualIvanGrozniPas encore d'évaluation
- Usb Hardware TokenDocument24 pagesUsb Hardware TokenquezeePas encore d'évaluation
- GMKN 1022Document6 pagesGMKN 10221012268087Pas encore d'évaluation
- Service Manual AA-2W: KV-27FV15 KV-27FV15 KV-29FV10 KV-29FV15 KV-29FV15C KV-29FV15KDocument72 pagesService Manual AA-2W: KV-27FV15 KV-27FV15 KV-29FV10 KV-29FV15 KV-29FV15C KV-29FV15KHilary KingPas encore d'évaluation
- KD 65 X 8000 CDocument98 pagesKD 65 X 8000 CkallePas encore d'évaluation
- Horizontal Multi-Stage Pumps: Component MaterialDocument2 pagesHorizontal Multi-Stage Pumps: Component MaterialBrayan CJPas encore d'évaluation