Vous aimerez peut-être aussi
- NBR 15007 3Document9 pagesNBR 15007 3Cezar Clemente0% (1)
- Modelo Comprovante de ResidenciaDocument4 pagesModelo Comprovante de ResidenciaGabriel Andreatta0% (1)
- Criativo Por AcasoDocument19 pagesCriativo Por Acasocjardel_adm1140Pas encore d'évaluation
- NaturaDocument108 pagesNaturaAndré Tomé0% (1)
- Lista 5 - IsostáticaDocument10 pagesLista 5 - Isostáticabruno_castilho_10% (1)
- Relatorio Do Projeto Unificado - 2Document30 pagesRelatorio Do Projeto Unificado - 2bruno_castilho_1Pas encore d'évaluation
- Previdência Privada - Junho 17 - XP InvestimentosDocument5 pagesPrevidência Privada - Junho 17 - XP Investimentosbruno_castilho_1Pas encore d'évaluation
- Lista 4 - IsostáticaDocument2 pagesLista 4 - Isostáticabruno_castilho_1Pas encore d'évaluation
- Lista 2 - IsostáticaDocument2 pagesLista 2 - Isostáticabruno_castilho_1Pas encore d'évaluation
- Lista 3 - IsostáticaDocument1 pageLista 3 - Isostáticabruno_castilho_1Pas encore d'évaluation
- DinamicaDocument12 pagesDinamicabruno_castilho_1Pas encore d'évaluation
- ADM5Document4 pagesADM5bruno_castilho_1Pas encore d'évaluation
- Lista 1 - IsostáticaDocument1 pageLista 1 - Isostáticabruno_castilho_1Pas encore d'évaluation
- Prova de ICC - 2007 - UNESP BauruDocument1 pageProva de ICC - 2007 - UNESP Baurubruno_castilho_1Pas encore d'évaluation
- P1 "Duas Linhas"Document1 pageP1 "Duas Linhas"bruno_castilho_1Pas encore d'évaluation
- Cinetica Quimica LucidioDocument1 pageCinetica Quimica Lucidiobruno_castilho_1Pas encore d'évaluation
- TK NX-240-340 Catalogo PortuguesDocument2 pagesTK NX-240-340 Catalogo PortuguesWylltonMacielCoelhoPas encore d'évaluation
- Aula 06 - Retificadores Monofasicos ControladosDocument43 pagesAula 06 - Retificadores Monofasicos ControladosJhonatha BernardoPas encore d'évaluation
- Geografia Geral e Do Brasil - GABARITODocument25 pagesGeografia Geral e Do Brasil - GABARITOAnderson MouraPas encore d'évaluation
- Sakura Trick - YuriVersoDocument18 pagesSakura Trick - YuriVersonicolePas encore d'évaluation
- Obtenção e Retenção de TalentosDocument34 pagesObtenção e Retenção de TalentosGiovanna Manzano GuimarãesPas encore d'évaluation
- Aprendizagem Activa Na Criança Com Multideficiencia - Guia para Educadores - de Clarisse NunesDocument140 pagesAprendizagem Activa Na Criança Com Multideficiencia - Guia para Educadores - de Clarisse NunesDaniela FernandesPas encore d'évaluation
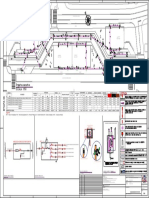
- 34 - I.P Três Lagoas - Área 06 - R04 - 01-02Document1 page34 - I.P Três Lagoas - Área 06 - R04 - 01-02Marcelo Mazutti ToniniPas encore d'évaluation
- Normas e Procedimentos para A Realização de Eventos e Concertos Na Sala São PauloDocument21 pagesNormas e Procedimentos para A Realização de Eventos e Concertos Na Sala São PauloLetícia VenancioPas encore d'évaluation
- Aplicação Da Engenharia de Métodos em Uma Empresa de Panificação e ConfeitariaDocument14 pagesAplicação Da Engenharia de Métodos em Uma Empresa de Panificação e ConfeitariaThiago TamachiroPas encore d'évaluation
- Manual Trabalho de Conclusao de Curso - TCC PDFDocument124 pagesManual Trabalho de Conclusao de Curso - TCC PDFJulio LealPas encore d'évaluation
- Como Calcular Volume de Concreto para Lajes - Passo A Passo115204Document14 pagesComo Calcular Volume de Concreto para Lajes - Passo A Passo115204Douglas PóvoasPas encore d'évaluation
- A História Do TelefoneDocument2 pagesA História Do TelefoneAriadne FariasPas encore d'évaluation
- Revisão S - 6X4 - Off Road Scania 540 XTDocument5 pagesRevisão S - 6X4 - Off Road Scania 540 XTrodolfo rodriges'Pas encore d'évaluation
- 9 - Escoamentos Variáveis Sob PressãoDocument27 pages9 - Escoamentos Variáveis Sob PressãoWanda FranciscoPas encore d'évaluation
- Como Instalar o Windows 7 e 8 em Modo UEFIDocument10 pagesComo Instalar o Windows 7 e 8 em Modo UEFIJeferson GonçalvesPas encore d'évaluation
- Aula 1 MicrocontroladoresDocument15 pagesAula 1 Microcontroladoresangaba9272Pas encore d'évaluation
- 4 Usinagem FresamentoDocument96 pages4 Usinagem FresamentoJoão Paulo Bastos100% (1)
- Princípios Físicos Hidráulica Industrial.Document20 pagesPrincípios Físicos Hidráulica Industrial.Alberto Jorge DariusPas encore d'évaluation
- Laudo EngenhariaDocument139 pagesLaudo EngenhariaAnna CarolinePas encore d'évaluation
- Medição de Grandezas ElétricasDocument8 pagesMedição de Grandezas ElétricasAndré MarquesPas encore d'évaluation
- Boleto Maria Aline Cardoso BorgesDocument1 pageBoleto Maria Aline Cardoso Borgesbruno feira meloPas encore d'évaluation
- Chek List NR 13 - Caldeiras e Vasos de PressãoDocument3 pagesChek List NR 13 - Caldeiras e Vasos de PressãoAdilson Oliveira100% (1)
- Flavio 31Document5 pagesFlavio 31Flavio VieiraPas encore d'évaluation
- Planilha Plano Marketing 4ps KotlerDocument16 pagesPlanilha Plano Marketing 4ps KotlerWilliam AngonesePas encore d'évaluation
- Manual Motor CAT 3176Document4 pagesManual Motor CAT 3176HenriquePas encore d'évaluation
- (CEDERJ) Trabalho de Campo - Educação AmbientalDocument12 pages(CEDERJ) Trabalho de Campo - Educação AmbientalBárbara0% (1)