Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
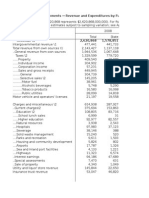
- State and Local Governments - Revenue and Expenditures by Function: 2008 To 2012Document8 pagesState and Local Governments - Revenue and Expenditures by Function: 2008 To 2012Leana Polston-MurdochPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Onboarding QuestionnaireDocument4 pagesOnboarding QuestionnaireLeana Polston-MurdochPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- La Colaboración, La Innovación, La Transformación de Ideas y La Inspiración para Acelerar El Crecimiento Sostenible - Un Enfoque de Cadena de ValorDocument40 pagesLa Colaboración, La Innovación, La Transformación de Ideas y La Inspiración para Acelerar El Crecimiento Sostenible - Un Enfoque de Cadena de ValorALBERTO GUAJARDO MENESESPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Estimated State and Local Taxes Paid by A Family of Three in Selected Largest City in Each State: 2013Document16 pagesEstimated State and Local Taxes Paid by A Family of Three in Selected Largest City in Each State: 2013Leana Polston-MurdochPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Table 471Document126 pagesTable 471Leana Polston-MurdochPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- 1974 Perceived InnovationDocument8 pages1974 Perceived InnovationLeana Polston-MurdochPas encore d'évaluation
- PDC PmphandbookDocument0 pagePDC PmphandbookAhmed FoudaPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Deming Management Method Subjecting Theory To Moderating and Contextual EffectsDocument30 pagesDeming Management Method Subjecting Theory To Moderating and Contextual EffectsLeana Polston-Murdoch100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Culture and CauseDocument23 pagesCulture and CauseLeana Polston-MurdochPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Inferential Statistical Decision Making TreesDocument2 pagesInferential Statistical Decision Making TreesLeana Polston-MurdochPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- An Investigation of Path-GoalDocument32 pagesAn Investigation of Path-GoallengocthangPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- AMOS TutorialDocument17 pagesAMOS TutorialLeana Polston-MurdochPas encore d'évaluation
- An Investigation of Path-GoalDocument32 pagesAn Investigation of Path-GoallengocthangPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Data Transformation HandoutDocument2 pagesData Transformation HandoutFer LabPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Variable Types PDFDocument3 pagesVariable Types PDFArinta Riza AndrianiPas encore d'évaluation
- Comprehensive Model of MotivationDocument1 pageComprehensive Model of MotivationLeana Polston-MurdochPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- InteractionDocument6 pagesInteractionmngolferPas encore d'évaluation
- Empathy Scale 2000Document1 pageEmpathy Scale 2000Leana Polston-MurdochPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- AMOS TutorialDocument17 pagesAMOS TutorialLeana Polston-MurdochPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Index of Organizational ReactionsDocument6 pagesIndex of Organizational ReactionsLeana Polston-Murdoch100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Innovation ObligationDocument1 pageInnovation ObligationLeana Polston-MurdochPas encore d'évaluation
- Employee Performance Scale Leadership Communication of Corporate VisionDocument2 pagesEmployee Performance Scale Leadership Communication of Corporate VisionLeana Polston-MurdochPas encore d'évaluation
- Leadership Expert QuestionnaireDocument4 pagesLeadership Expert QuestionnaireLeana Polston-MurdochPas encore d'évaluation
- Index of Organizational ReactionsDocument6 pagesIndex of Organizational ReactionsLeana Polston-Murdoch100% (1)
- Managerial Practices Survey 2012Document3 pagesManagerial Practices Survey 2012Leana Polston-Murdoch75% (4)
- Managerial Practices Survey 2012Document3 pagesManagerial Practices Survey 2012Leana Polston-Murdoch75% (4)
- Empowerment at Work ScaleDocument1 pageEmpowerment at Work ScaleLeana Polston-MurdochPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Leadership Styles QuestionnaireDocument5 pagesLeadership Styles QuestionnaireLeana Polston-MurdochPas encore d'évaluation
- Empowerment at Work ScaleDocument1 pageEmpowerment at Work ScaleLeana Polston-MurdochPas encore d'évaluation
- Analgesic ActivityDocument4 pagesAnalgesic ActivitypranaliankitPas encore d'évaluation
- Speech VP SaraDocument2 pagesSpeech VP SaraStephanie Dawn MagallanesPas encore d'évaluation
- Nicolopoulou-Stamati - Reproductive Health and The EnvironmentDocument409 pagesNicolopoulou-Stamati - Reproductive Health and The EnvironmentGiorgos PapasakelarisPas encore d'évaluation
- SunEdison Pancho Perez Complaint As FiledDocument47 pagesSunEdison Pancho Perez Complaint As FiledLizHoffmanPas encore d'évaluation
- What Is Mathematical InvestigationDocument1 pageWhat Is Mathematical Investigationbj mandia100% (1)
- Upload Emp Photo ConfigDocument14 pagesUpload Emp Photo Configpaulantony143Pas encore d'évaluation
- Chapter 8 Review QuestionsDocument2 pagesChapter 8 Review QuestionsSouthernGurl99Pas encore d'évaluation
- Info Cad Engb FestoDocument14 pagesInfo Cad Engb FestoBayu RahmansyahPas encore d'évaluation
- Portel's Value Chain AnalysisDocument3 pagesPortel's Value Chain AnalysisNivedPas encore d'évaluation
- Invisible Rainbow A History of Electricity and LifeDocument17 pagesInvisible Rainbow A History of Electricity and LifeLarita Nievas100% (3)
- Mein Leben Und Streben by May, Karl Friedrich, 1842-1912Document129 pagesMein Leben Und Streben by May, Karl Friedrich, 1842-1912Gutenberg.orgPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Final DemoDocument14 pagesFinal DemoangiePas encore d'évaluation
- Seerat Mujaddid Alf-e-Sani (Urdu)Document518 pagesSeerat Mujaddid Alf-e-Sani (Urdu)Talib Ghaffari100% (12)
- Kematian Di ICUDocument24 pagesKematian Di ICURahmida RahmyPas encore d'évaluation
- CR Injector Repair Kits 2016Document32 pagesCR Injector Repair Kits 2016Euro Diesel100% (2)
- Lista Alumnos Julio 2019123Document74 pagesLista Alumnos Julio 2019123Mateo RomeroPas encore d'évaluation
- Tutorial Getting Started With Code Aster PDFDocument12 pagesTutorial Getting Started With Code Aster PDFEnriquePas encore d'évaluation
- TSH TestDocument5 pagesTSH TestdenalynPas encore d'évaluation
- Soal Respi 2010Document41 pagesSoal Respi 2010Joseph ThanaPas encore d'évaluation
- 4 Problem GamblingDocument14 pages4 Problem GamblingLee Jia HuiPas encore d'évaluation
- Marriage and Divorce Conflicts in The International PerspectiveDocument33 pagesMarriage and Divorce Conflicts in The International PerspectiveAnjani kumarPas encore d'évaluation
- MahayanaDocument26 pagesMahayanaAleza Menorca100% (1)
- Speakout Language BankDocument7 pagesSpeakout Language BankСаша БулуєвPas encore d'évaluation
- Course Content: SAP Fiori Implementation (SAPX03)Document3 pagesCourse Content: SAP Fiori Implementation (SAPX03)Jathin Varma KanumuriPas encore d'évaluation
- Portfolio Artifact 1 - Personal Cultural Project Edu 280Document10 pagesPortfolio Artifact 1 - Personal Cultural Project Edu 280api-313833593Pas encore d'évaluation
- 11v.jigisha Chaptear2Document53 pages11v.jigisha Chaptear2Anirban PalPas encore d'évaluation
- InvestMemo TemplateDocument6 pagesInvestMemo TemplatealiranagPas encore d'évaluation
- MIL Q3 Module 5 REVISEDDocument23 pagesMIL Q3 Module 5 REVISEDEustass Kidd68% (19)
- How To Manage Asthma: A GuideDocument44 pagesHow To Manage Asthma: A GuideSrinivas YerriboinaPas encore d'évaluation
- Lee. Building Balanced Scorecard With SWOT Analysis, and Implementing "Sun Tzu's The Art of Business Management Strategies" On QFD Methodology PDFDocument13 pagesLee. Building Balanced Scorecard With SWOT Analysis, and Implementing "Sun Tzu's The Art of Business Management Strategies" On QFD Methodology PDFSekar Ayu ParamitaPas encore d'évaluation
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsD'EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeD'EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeÉvaluation : 4 sur 5 étoiles4/5 (2)
- Calculus Workbook For Dummies with Online PracticeD'EverandCalculus Workbook For Dummies with Online PracticeÉvaluation : 3.5 sur 5 étoiles3.5/5 (8)