Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- SerDes - WikipediaDocument3 pagesSerDes - WikipediaPronadeep BoraPas encore d'évaluation
- 2quickly Implement JESD204BDocument4 pages2quickly Implement JESD204BPronadeep BoraPas encore d'évaluation
- What Is JESD204 and Why Should We Pay Attention To ItDocument3 pagesWhat Is JESD204 and Why Should We Pay Attention To ItPronadeep BoraPas encore d'évaluation
- Jesd204c Primer Part1Document3 pagesJesd204c Primer Part1Pronadeep BoraPas encore d'évaluation
- 8b - 10b Encoding - WikipediaDocument8 pages8b - 10b Encoding - WikipediaPronadeep BoraPas encore d'évaluation
- Amukh Expre CertifDocument1 pageAmukh Expre CertifPronadeep BoraPas encore d'évaluation
- EDN - Understanding Layers in The JESD204B Specification - A High Speed ADC Perspective, Part 2 - EDNDocument8 pagesEDN - Understanding Layers in The JESD204B Specification - A High Speed ADC Perspective, Part 2 - EDNPronadeep BoraPas encore d'évaluation
- Demystifying Deterministic Latency Within JESD204B Converters - Electronic DesignDocument11 pagesDemystifying Deterministic Latency Within JESD204B Converters - Electronic DesignPronadeep BoraPas encore d'évaluation
- AMBA AHB AXI Interview Questions Verification Guide PDFDocument2 pagesAMBA AHB AXI Interview Questions Verification Guide PDFPronadeep BoraPas encore d'évaluation
- SMDP - Project - Final - Proposal - NIT - N - Draft PDFDocument17 pagesSMDP - Project - Final - Proposal - NIT - N - Draft PDFPronadeep BoraPas encore d'évaluation
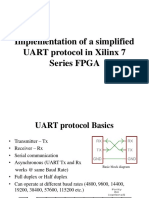
- UARTDocument24 pagesUARTPronadeep BoraPas encore d'évaluation
- UART SpecDocument24 pagesUART SpecPronadeep BoraPas encore d'évaluation
- AMBA AHB Protocol PresentationDocument45 pagesAMBA AHB Protocol Presentationachanta1291% (11)
- Difference Between AHB and AXI - Difference BetweenDocument2 pagesDifference Between AHB and AXI - Difference BetweenPronadeep BoraPas encore d'évaluation
- Utilization Certificate - SMDP-1Document1 pageUtilization Certificate - SMDP-1Pronadeep BoraPas encore d'évaluation
- V2 - Proforma For Submitting 6 MONTHLY REPORTDocument9 pagesV2 - Proforma For Submitting 6 MONTHLY REPORTPronadeep BoraPas encore d'évaluation
- Clock Domain Crossing & Asynchronous FIFODocument40 pagesClock Domain Crossing & Asynchronous FIFOPronadeep Bora100% (1)
- AXI Vs AHB. Difference Between AXI and AHBDocument3 pagesAXI Vs AHB. Difference Between AXI and AHBPronadeep Bora100% (2)
- Valid Documents List PDFDocument2 pagesValid Documents List PDFAnoop DubeyPas encore d'évaluation
- Clock Domain Crossing & Asynchronous FIFODocument40 pagesClock Domain Crossing & Asynchronous FIFOPronadeep Bora100% (1)
- WHMS NitnDocument14 pagesWHMS NitnPronadeep BoraPas encore d'évaluation
- SMDP C2SDSixmonthlyProgressFinalDocument4 pagesSMDP C2SDSixmonthlyProgressFinalPronadeep BoraPas encore d'évaluation
- Six Monthly Progress-FormatDocument3 pagesSix Monthly Progress-FormatPronadeep BoraPas encore d'évaluation
- AQMS NitnDocument11 pagesAQMS NitnPronadeep BoraPas encore d'évaluation
- Nit Nagaland - Pmod - Quote - DG - CoreelDocument1 pageNit Nagaland - Pmod - Quote - DG - CoreelPronadeep BoraPas encore d'évaluation
- Six Monthly Progress-Annexures (Tables)Document6 pagesSix Monthly Progress-Annexures (Tables)Pronadeep BoraPas encore d'évaluation
- Quotations For Components Required For SMDP ProjectDocument2 pagesQuotations For Components Required For SMDP ProjectPronadeep BoraPas encore d'évaluation
- Current Project StatusDocument1 pageCurrent Project StatusPronadeep BoraPas encore d'évaluation
- Element14equipments PDFDocument1 pageElement14equipments PDFPronadeep BoraPas encore d'évaluation
- Digilent LABSeupimentsDocument1 pageDigilent LABSeupimentsPronadeep BoraPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- S/Mime (Secure/Multipurpose Internet Mail Extensions)Document15 pagesS/Mime (Secure/Multipurpose Internet Mail Extensions)Vishnupriya100% (1)
- Pro ESEDocument2 pagesPro ESEquadhirababilPas encore d'évaluation
- Bedia CLS 40 45 GBDocument36 pagesBedia CLS 40 45 GBkadir kayaPas encore d'évaluation
- PUMY-P100-140YHM Technical & Service Manual (OC355revB)Document90 pagesPUMY-P100-140YHM Technical & Service Manual (OC355revB)Pavle PerovicPas encore d'évaluation
- 1001451317230Document12 pages1001451317230JulioEdgarHanccoZeaPas encore d'évaluation
- Alcatel 4029 EngDocument31 pagesAlcatel 4029 Engafsanto2000Pas encore d'évaluation
- Cswip Appendix 01Document23 pagesCswip Appendix 01Nsidibe Michael EtimPas encore d'évaluation
- Product Manual: 1018 - Phidgetinterfacekit 8/8/8Document21 pagesProduct Manual: 1018 - Phidgetinterfacekit 8/8/8Eduardo Piña Martínez100% (1)
- Pole Placement by State Feedback in DC Motor by MatlabDocument13 pagesPole Placement by State Feedback in DC Motor by MatlabJason JonesPas encore d'évaluation
- Sarvani ProfileDocument12 pagesSarvani Profiledox4print100% (1)
- Powerflex 525 Devicenet Adapter: User ManualDocument140 pagesPowerflex 525 Devicenet Adapter: User ManualJahir Emerson Tantalean QuiñonesPas encore d'évaluation
- Sesam and Bladed - Efficient Coupled Analyses - Webinar Presentation - tcm8-102589 PDFDocument31 pagesSesam and Bladed - Efficient Coupled Analyses - Webinar Presentation - tcm8-102589 PDFsamiransmitaPas encore d'évaluation
- Schiotz TonometerDocument9 pagesSchiotz TonometerDR_LUBYPas encore d'évaluation
- 07a80809 OperationsresearchDocument11 pages07a80809 OperationsresearchSharanya ThirichinapalliPas encore d'évaluation
- Shaft Alignment: Your Photo HereDocument75 pagesShaft Alignment: Your Photo HereMahmoud Elghandour0% (1)
- User Manual of Egov 11.0 Implementation of It Solution For RVNL D3799 Document Version / DetailsDocument64 pagesUser Manual of Egov 11.0 Implementation of It Solution For RVNL D3799 Document Version / DetailsRVNLPKG6B VBL-GTLMPas encore d'évaluation
- Mds Ti-Alloy Ta15 0720 enDocument3 pagesMds Ti-Alloy Ta15 0720 enshahin_723Pas encore d'évaluation
- LAN Cabling: Straight ThroughDocument3 pagesLAN Cabling: Straight ThroughGemma Quiocho-CardenasPas encore d'évaluation
- Final Defence 2078Document43 pagesFinal Defence 2078XxxPas encore d'évaluation
- (Solution Manual) Fundamentals of Electric Circuits 4ed - Sadiku-Pages-774-800Document35 pages(Solution Manual) Fundamentals of Electric Circuits 4ed - Sadiku-Pages-774-800Leo AudePas encore d'évaluation
- Rodriguez-Castro Et Al 2022 Human Highly Modified Landscapes Restrict Gene FlowDocument20 pagesRodriguez-Castro Et Al 2022 Human Highly Modified Landscapes Restrict Gene FlowShara MotaPas encore d'évaluation
- L011375 - MT4434TE Spec SheetDocument2 pagesL011375 - MT4434TE Spec SheetJunior BautistaPas encore d'évaluation
- Enatel FlexiMAX24a500Kw PDFDocument2 pagesEnatel FlexiMAX24a500Kw PDFJosé Angel PinedaPas encore d'évaluation
- Hybrid ModelDocument9 pagesHybrid ModelanjulPas encore d'évaluation
- Fascial Manipulation For Internal Dysfunctions FMIDDocument8 pagesFascial Manipulation For Internal Dysfunctions FMIDdavidzhouPas encore d'évaluation
- PointersDocument29 pagesPointersHindhupriyaPas encore d'évaluation
- Immediate Settlement Analysis Using Finite Element Analysis Models of Fb-MultipierDocument22 pagesImmediate Settlement Analysis Using Finite Element Analysis Models of Fb-MultipierRaaf RifandiPas encore d'évaluation
- G12 NCERT Unit-14 BiomoleculesDocument15 pagesG12 NCERT Unit-14 Biomoleculescherryakila05Pas encore d'évaluation
- Ekg 8Document2 pagesEkg 8Arun SPas encore d'évaluation
- Western Dragon V3 Updated PDFDocument19 pagesWestern Dragon V3 Updated PDFMark Moldez94% (17)