Vous aimerez peut-être aussi
- A Low-Power, High-Speed DCT Architecture For Image Compression: Principle and ImplementationDocument6 pagesA Low-Power, High-Speed DCT Architecture For Image Compression: Principle and ImplementationPrapulla Kumar RPas encore d'évaluation
- Complete PCB Design Using OrCAD Capture and PCB EditorD'EverandComplete PCB Design Using OrCAD Capture and PCB EditorÉvaluation : 5 sur 5 étoiles5/5 (1)
- GHRA Cordic MinaxDocument14 pagesGHRA Cordic Minaxraymar2kPas encore d'évaluation
- Precision-Aware and Quantization of Lifting Based DWT Hardware ArchitectureDocument7 pagesPrecision-Aware and Quantization of Lifting Based DWT Hardware ArchitectureriyazpashaPas encore d'évaluation
- CORDIC Designs For Fixed Angle of Rotation: Pramod Kumar Meher, Senior Member, IEEE, and Sang Yoon Park, Member, IEEEDocument12 pagesCORDIC Designs For Fixed Angle of Rotation: Pramod Kumar Meher, Senior Member, IEEE, and Sang Yoon Park, Member, IEEEak86Pas encore d'évaluation
- Scaling Free CORDIC Algorithm Implementation of Sine and Cosine FunctionDocument4 pagesScaling Free CORDIC Algorithm Implementation of Sine and Cosine FunctionharivarahiPas encore d'évaluation
- Design of An Optimized Cordic For Fixed Angle of Rotation IJERTV3IS20817Document5 pagesDesign of An Optimized Cordic For Fixed Angle of Rotation IJERTV3IS20817parvathyms1989Pas encore d'évaluation
- Performance Analysis of CORDIC Architectures Targeted For FPGA DevicesDocument6 pagesPerformance Analysis of CORDIC Architectures Targeted For FPGA Deviceseditor_ijarcssePas encore d'évaluation
- FPGA Based Implementation of 2D Discrete Cosine Transform AlgorithmDocument13 pagesFPGA Based Implementation of 2D Discrete Cosine Transform AlgorithmPragati PrajapatiPas encore d'évaluation
- Power Computation of Floating-Point NumbersDocument8 pagesPower Computation of Floating-Point NumbersAnkur PatelPas encore d'évaluation
- Simulink Design of Pipelined CORDIC For Generation of Sine and Cosine ValuesDocument5 pagesSimulink Design of Pipelined CORDIC For Generation of Sine and Cosine ValuesInternational Journal of computational Engineering research (IJCER)Pas encore d'évaluation
- Dds CordicDocument10 pagesDds CordicBruno VitorinoPas encore d'évaluation
- Cordic SVD HWDocument6 pagesCordic SVD HWasdf2828Pas encore d'évaluation
- CORDIC Algorithm and It's Applications in DSPDocument43 pagesCORDIC Algorithm and It's Applications in DSPhello123Pas encore d'évaluation
- Weighted Partitioning For Fast MultiplierlessDocument5 pagesWeighted Partitioning For Fast MultiplierlessDr. Ruqaiya KhanamPas encore d'évaluation
- FinalDocument27 pagesFinalsaikiranm031Pas encore d'évaluation
- Project Phase-2 Second Review On: Design of Efficient BCD Adder Using Different Logic GatesDocument27 pagesProject Phase-2 Second Review On: Design of Efficient BCD Adder Using Different Logic Gatessaikiranm031Pas encore d'évaluation
- A High-Performance On-Chip Memory Module For Image Processing ApplicationsDocument13 pagesA High-Performance On-Chip Memory Module For Image Processing ApplicationsIJRASETPublicationsPas encore d'évaluation
- Design of Fixed Angle Rotation Using CORDIC: Rajula Saidulu B.KarunaiahDocument5 pagesDesign of Fixed Angle Rotation Using CORDIC: Rajula Saidulu B.KarunaiahmoravinenirambabuPas encore d'évaluation
- VLSI Architecture For Parallel Radix-4 CORDICDocument8 pagesVLSI Architecture For Parallel Radix-4 CORDICAnkur PatelPas encore d'évaluation
- Energy-And Performance-Aware Mapping For Regular Noc ArchitecturesDocument12 pagesEnergy-And Performance-Aware Mapping For Regular Noc ArchitecturespnrgoudPas encore d'évaluation
- 00) TD-SRAM - Time-Domain-Based - In-Memory - Computing - Macro - For - Binary - Neural - NetworksDocument11 pages00) TD-SRAM - Time-Domain-Based - In-Memory - Computing - Macro - For - Binary - Neural - NetworksAMANDEEP SINGHPas encore d'évaluation
- A High-Performance and Memory-Efficient Pipeline Architecture For The 5/3 and 9/7 Discrete Wavelet Transform of JPEG2000 CodecDocument14 pagesA High-Performance and Memory-Efficient Pipeline Architecture For The 5/3 and 9/7 Discrete Wavelet Transform of JPEG2000 CodecNj NjPas encore d'évaluation
- Mira PDFDocument11 pagesMira PDFCecilia ChinnaPas encore d'évaluation
- Trigonometry/For Enthusiasts/The CORDIC Algorithm: What It IsDocument9 pagesTrigonometry/For Enthusiasts/The CORDIC Algorithm: What It Isamit.18.singh2466Pas encore d'évaluation
- Low Complexity ECCDocument5 pagesLow Complexity ECCsushmitha vPas encore d'évaluation
- Design of AC-DC Grid Connected Converter Using Multi-Objective OptimizationDocument9 pagesDesign of AC-DC Grid Connected Converter Using Multi-Objective OptimizationPavan Singh TomarPas encore d'évaluation
- 061 - PP 1109-1114Document6 pages061 - PP 1109-1114Vũ Quang HưngPas encore d'évaluation
- Two Dimensional DCTIDCT Architecture 2001Document29 pagesTwo Dimensional DCTIDCT Architecture 2001swathipushpaPas encore d'évaluation
- Compare Performance of 2D and 3D Mesh Architectures in Network-On-ChipDocument5 pagesCompare Performance of 2D and 3D Mesh Architectures in Network-On-ChipJournal of ComputingPas encore d'évaluation
- Electronics: A Hidden DCT-Based Invisible Watermarking Method For Low-Cost Hardware ImplementationsDocument25 pagesElectronics: A Hidden DCT-Based Invisible Watermarking Method For Low-Cost Hardware ImplementationsARUN CHILUKURIPas encore d'évaluation
- AI Technology For NoC Performance EvaluationDocument5 pagesAI Technology For NoC Performance EvaluationSoumya Shatakshi PandaPas encore d'évaluation
- Vlsi Design Approach To High-Performance Direct Torque Control of Induction Motor DrivesDocument8 pagesVlsi Design Approach To High-Performance Direct Torque Control of Induction Motor Drivesjooner45Pas encore d'évaluation
- FPGA Implementation of CORDIC-Based QRD-RLS AlgorithmDocument5 pagesFPGA Implementation of CORDIC-Based QRD-RLS Algorithmsappal73asPas encore d'évaluation
- Iot-Based DC/DC Deep Learning Power Converter Control: Real-Time ImplementationDocument10 pagesIot-Based DC/DC Deep Learning Power Converter Control: Real-Time ImplementationMayur ShimpiPas encore d'évaluation
- Roba MulDocument56 pagesRoba MulNishitha NishiPas encore d'évaluation
- Implementation of Cordic Algorithm Using Matlab & VHDL For Wlan ReceiverDocument3 pagesImplementation of Cordic Algorithm Using Matlab & VHDL For Wlan ReceiverHemant SaraswatPas encore d'évaluation
- Image Compression Using High Efficient Video Coding (HEVC) TechniqueDocument3 pagesImage Compression Using High Efficient Video Coding (HEVC) TechniqueAnonymous gQOifzPas encore d'évaluation
- Flexible DSP Accelerator Architecture Exploiting Carry-Save ArithmeticDocument5 pagesFlexible DSP Accelerator Architecture Exploiting Carry-Save ArithmeticSrinivas VuppanapalliPas encore d'évaluation
- A1101010108Document8 pagesA1101010108sudip mandalPas encore d'évaluation
- Electronics: Design of Cascaded CORDIC Based On Precise Analysis of Critical PathDocument13 pagesElectronics: Design of Cascaded CORDIC Based On Precise Analysis of Critical Pathaakanksha080Pas encore d'évaluation
- 16 Dynamic FullDocument14 pages16 Dynamic FullTJPRC PublicationsPas encore d'évaluation
- Radix-4 ArchitectureDocument11 pagesRadix-4 ArchitectureAnkur PatelPas encore d'évaluation
- 1997 TCASII I. Galton Spectral Shaping of Circuit Errors in Digital To Analog ConvertersDocument10 pages1997 TCASII I. Galton Spectral Shaping of Circuit Errors in Digital To Analog Converterskijiji userPas encore d'évaluation
- Radix 8Document7 pagesRadix 8Loc LePas encore d'évaluation
- 2019 TCASI AreaTimePower Efficient FFT Architectures Based On Binary-Signed-Digit CORDICDocument8 pages2019 TCASI AreaTimePower Efficient FFT Architectures Based On Binary-Signed-Digit CORDICTsukasa BerryPas encore d'évaluation
- Improved 8-Point Approximate DCT For Image and Video Compression Requiring Only 14 AdditionsDocument6 pagesImproved 8-Point Approximate DCT For Image and Video Compression Requiring Only 14 AdditionsTechnosIndiaPas encore d'évaluation
- Design and Implementation of Viterbi Decoder Using VHDL: IOP Conference Series: Materials Science and EngineeringDocument7 pagesDesign and Implementation of Viterbi Decoder Using VHDL: IOP Conference Series: Materials Science and Engineeringkrishna mohan pandeyPas encore d'évaluation
- Power Aware Clock Tree PlanningDocument10 pagesPower Aware Clock Tree PlanningSishir SudabattulaPas encore d'évaluation
- DivyasriDocument21 pagesDivyasrivenkata satishPas encore d'évaluation
- 1 - 04 - 2019 - Design Methodology To Explore Hybrid Approximate Adders For Energy-Efficient Image and Video Processing AcceleratorsDocument14 pages1 - 04 - 2019 - Design Methodology To Explore Hybrid Approximate Adders For Energy-Efficient Image and Video Processing Acceleratorspraba821Pas encore d'évaluation
- Project Phase-2 Zeroth Review On: Design of Efficient BCD Adder Using Different Logic GatesDocument19 pagesProject Phase-2 Zeroth Review On: Design of Efficient BCD Adder Using Different Logic Gatessaikiranm031Pas encore d'évaluation
- Hybrid Parallelization of A Turbomachinery CFD Code: Peformance Enhancements On Multicore ArchitecturesDocument15 pagesHybrid Parallelization of A Turbomachinery CFD Code: Peformance Enhancements On Multicore ArchitecturesSagnik BanikPas encore d'évaluation
- Green Data Center Networks: Challenges and Opportunities: Kashif Bilal, Samee U. Khan Albert Y. ZomayaDocument6 pagesGreen Data Center Networks: Challenges and Opportunities: Kashif Bilal, Samee U. Khan Albert Y. ZomayaNikesh BeradiyaPas encore d'évaluation
- 50 Years of CORDIC: Algorithms, Architectures, and ApplicationsDocument15 pages50 Years of CORDIC: Algorithms, Architectures, and ApplicationsZoyaPas encore d'évaluation
- Indonesian Journal of Electrical Engineering and Computer ScienceDocument12 pagesIndonesian Journal of Electrical Engineering and Computer ScienceMr KarthikPas encore d'évaluation
- Major Conference PaperDocument14 pagesMajor Conference Papermanishmeenahlm2Pas encore d'évaluation
- IEEEGlobecom2007 MGomesDocument5 pagesIEEEGlobecom2007 MGomesldpcPas encore d'évaluation
- Quantum Cellular Automata Based Efficient BCD Adder StructureDocument4 pagesQuantum Cellular Automata Based Efficient BCD Adder StructuresanthiyadevPas encore d'évaluation
- EC8702 Adhoc SyllabusDocument3 pagesEC8702 Adhoc SyllabusThahsin ThahirPas encore d'évaluation
- Lab ManualDocument66 pagesLab ManualThahsin ThahirPas encore d'évaluation
- EC8702 Adhoc Syllabus PDFDocument3 pagesEC8702 Adhoc Syllabus PDFThahsin Thahir100% (1)
- Delta ConnectionDocument4 pagesDelta ConnectionThahsin ThahirPas encore d'évaluation
- Wireless Communication Lesson Plan PDFDocument7 pagesWireless Communication Lesson Plan PDFThahsin ThahirPas encore d'évaluation
- 12.4 FFT PROCESSOR, Cont. 545Document7 pages12.4 FFT PROCESSOR, Cont. 545Thahsin ThahirPas encore d'évaluation
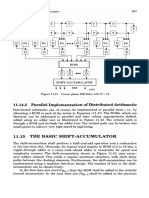
- Basic Shift AccumulatorDocument4 pagesBasic Shift AccumulatorThahsin ThahirPas encore d'évaluation
- Booth EncoderDocument8 pagesBooth EncoderThahsin ThahirPas encore d'évaluation
- EC6601-VLSI Design QBDocument11 pagesEC6601-VLSI Design QBThahsin ThahirPas encore d'évaluation
- M.E.VLSI DesignDocument43 pagesM.E.VLSI DesignThahsin ThahirPas encore d'évaluation
- Simulation of Signal Constellations ofDocument19 pagesSimulation of Signal Constellations ofThahsin ThahirPas encore d'évaluation
- Cs Lab ADC DACDocument3 pagesCs Lab ADC DACThahsin ThahirPas encore d'évaluation
- Moore and Mealy MachinesDocument5 pagesMoore and Mealy MachinesThahsin ThahirPas encore d'évaluation
- XL01310051011 PDFDocument7 pagesXL01310051011 PDFThahsin ThahirPas encore d'évaluation
- 30 Fault Tolerant Parallel Filters Based On Error Correction CodesDocument6 pages30 Fault Tolerant Parallel Filters Based On Error Correction CodesThahsin ThahirPas encore d'évaluation
- Tanner EDA Tutorials PDFDocument53 pagesTanner EDA Tutorials PDFThahsin Thahir100% (2)
- Interrupts in 8051: Microprocessor Laboratory EE-337Document11 pagesInterrupts in 8051: Microprocessor Laboratory EE-337Ayandev BarmanPas encore d'évaluation
- Holberton CodeDocument50 pagesHolberton CodeNatalia ZapataPas encore d'évaluation
- Module II - RequirementsDocument155 pagesModule II - RequirementsMadhavan KPas encore d'évaluation
- DSP Objective QuestionsDocument4 pagesDSP Objective QuestionsshankarPas encore d'évaluation
- Iprocurement Setup 11iDocument19 pagesIprocurement Setup 11iAman Khan Badal KhanPas encore d'évaluation
- Using Capacity Magic To Size Storwize V7000 Disk SystemsDocument19 pagesUsing Capacity Magic To Size Storwize V7000 Disk SystemsdclnmurrayPas encore d'évaluation
- AS400 IntroductionDocument61 pagesAS400 IntroductionSuparna DeyPas encore d'évaluation
- Machine LearningDocument135 pagesMachine LearningBlack Sat100% (2)
- PHPExcel Developer Documentation PDFDocument52 pagesPHPExcel Developer Documentation PDFDanielPas encore d'évaluation
- VHDL As A Language: SimulationDocument9 pagesVHDL As A Language: Simulationkamal01236Pas encore d'évaluation
- Essentials of Rational Clearcase Module 1: Getting Started: Ibm Software GroupDocument30 pagesEssentials of Rational Clearcase Module 1: Getting Started: Ibm Software GroupmnreddyPas encore d'évaluation
- 9-6 Administering Broker PDFDocument640 pages9-6 Administering Broker PDFanil choudaryPas encore d'évaluation
- SQL Queries With AnswersDocument16 pagesSQL Queries With AnswersBalaa100% (2)
- Using Toolbars in Visual FoxProDocument4 pagesUsing Toolbars in Visual FoxProCarlos N. PorrasPas encore d'évaluation
- Micro Strategy Interview Questions and AnswersDocument3 pagesMicro Strategy Interview Questions and AnswersatoztargetPas encore d'évaluation
- Exam in Grade 9 TLEDocument2 pagesExam in Grade 9 TLEBobbyJunjuAo-asPas encore d'évaluation
- Tim Chiacchira ResumeDocument3 pagesTim Chiacchira ResumeTimothy ChiacchiraPas encore d'évaluation
- Netcat by Knight CrawlerDocument9 pagesNetcat by Knight Crawlerqwerty9020Pas encore d'évaluation
- Script Hook V - AB Software DevelopmentDocument1 pageScript Hook V - AB Software DevelopmentAbouFateh22% (9)
- Storage Passwords EMC, CISCO. HP, IBMDocument7 pagesStorage Passwords EMC, CISCO. HP, IBMduperPas encore d'évaluation
- Manual Epush Server PDFDocument18 pagesManual Epush Server PDFum4irPas encore d'évaluation
- CCNA Final Exam ReviewerDocument50 pagesCCNA Final Exam ReviewerBdick CruzPas encore d'évaluation
- ANSA Miscellaneous Technical FAQDocument12 pagesANSA Miscellaneous Technical FAQnrkarthikPas encore d'évaluation
- RedHat EX200Document12 pagesRedHat EX200MbaStudent56Pas encore d'évaluation
- SalesforceCanvasAdapterforTableau (Sparkler) v1-04Document55 pagesSalesforceCanvasAdapterforTableau (Sparkler) v1-04robingroverPas encore d'évaluation
- Sap Ewm OverviewDocument11 pagesSap Ewm OverviewsachinPas encore d'évaluation
- AS400 Complete Command ListDocument43 pagesAS400 Complete Command ListZubear MustafaPas encore d'évaluation
- Daily Reports Postilion: Alarms - A05W063Document8 pagesDaily Reports Postilion: Alarms - A05W063dbvruthwizPas encore d'évaluation
- Perintah2 Di ZkemDocument3 pagesPerintah2 Di Zkemafni adfsfPas encore d'évaluation
- Vet Clinic Customer Database - 0Document30 pagesVet Clinic Customer Database - 0Erfan Ahmed75% (4)
- Beginning AutoCAD® 2022 Exercise Workbook: For Windows®D'EverandBeginning AutoCAD® 2022 Exercise Workbook: For Windows®Pas encore d'évaluation
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)D'EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Évaluation : 5 sur 5 étoiles5/5 (2)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsD'EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsPas encore d'évaluation
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchD'EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchÉvaluation : 4 sur 5 étoiles4/5 (10)
- AutoCAD 2010 Tutorial Series: Drawing Dimensions, Elevations and SectionsD'EverandAutoCAD 2010 Tutorial Series: Drawing Dimensions, Elevations and SectionsPas encore d'évaluation