Vous aimerez peut-être aussi
- JY901 Gyroscope User Manual by Elecmaster PDFDocument25 pagesJY901 Gyroscope User Manual by Elecmaster PDFFabián MedinaPas encore d'évaluation
- RTL 8186Document50 pagesRTL 8186Maria Alejandra DalcolmoPas encore d'évaluation
- ID-LA-IsO Series Low Cost RFID Reader Module Used Animal Tagging LF ISO11785Document10 pagesID-LA-IsO Series Low Cost RFID Reader Module Used Animal Tagging LF ISO11785AbleIDLtdPas encore d'évaluation
- Abstract 2. Circuit Diagram 3. Explanation 4. Working 5. Program Code 6. PCB Layout Fabrication and Assembly 8. Conclusion 9. Reference 10. DatasheetDocument22 pagesAbstract 2. Circuit Diagram 3. Explanation 4. Working 5. Program Code 6. PCB Layout Fabrication and Assembly 8. Conclusion 9. Reference 10. Datasheetaditya_pundirPas encore d'évaluation
- Self Balancing BotDocument14 pagesSelf Balancing BotshivimshrPas encore d'évaluation
- ECR MachineDocument37 pagesECR Machineapi-3721578100% (1)
- 32K 5.0V I C Smart Serial Eeprom: Obsolete DeviceDocument15 pages32K 5.0V I C Smart Serial Eeprom: Obsolete DeviceDar KeyyPas encore d'évaluation
- 09 - I2C Serial CommunicationsmDocument10 pages09 - I2C Serial CommunicationsmSorabh DungPas encore d'évaluation
- Logic Analyzer TutorialDocument25 pagesLogic Analyzer TutorialJames OwenPas encore d'évaluation
- IDT72V8988 - DataSheetDocument14 pagesIDT72V8988 - DataSheetDang KhuePas encore d'évaluation
- STMW Internet - of - Things - Lab - ManualDocument50 pagesSTMW Internet - of - Things - Lab - ManualthummalakuntasPas encore d'évaluation
- 24C32Document12 pages24C32Joao EfremPas encore d'évaluation
- Automatic Speed BreakerDocument69 pagesAutomatic Speed BreakerRohitesh KumarPas encore d'évaluation
- Embedded Sysytem FileDocument52 pagesEmbedded Sysytem FileGagan MaggoPas encore d'évaluation
- RS 485Document51 pagesRS 485mgitecetech100% (1)
- 24C64WPDocument15 pages24C64WPaldo_suviPas encore d'évaluation
- Circuit Diagram Wireless TransmitterDocument17 pagesCircuit Diagram Wireless Transmitterumaiya1990100% (2)
- Project FileDocument131 pagesProject FileshaanjalalPas encore d'évaluation
- Prepaid Energy MeterDocument131 pagesPrepaid Energy Metersatyajit_manna_2100% (1)
- 24C02Document27 pages24C02Biswajit SarkarPas encore d'évaluation
- 6 in 1 Serial Drive Data SheetDocument12 pages6 in 1 Serial Drive Data SheetJuanmi TaboadaPas encore d'évaluation
- N25S818HA 256 KB Low Power Serial Srams: 32 K X 8 Bit OrganizationDocument12 pagesN25S818HA 256 KB Low Power Serial Srams: 32 K X 8 Bit OrganizationSyed ShahPas encore d'évaluation
- Circuit Logic User GuideDocument59 pagesCircuit Logic User Guideঅন্তরআত্মারসন্ধানে100% (1)
- Training ReportDocument18 pagesTraining Reportpiyushji125Pas encore d'évaluation
- Research Paper On 8086 MicroprocessorDocument7 pagesResearch Paper On 8086 Microprocessorfzqs7g1d100% (1)
- Z3 2 4Document104 pagesZ3 2 4Vu Duc Hoan100% (1)
- Sprs 276 KDocument255 pagesSprs 276 Ktheomen3007Pas encore d'évaluation
- Home Security System Using Microcontroller 8051: Project Synopsis OnDocument19 pagesHome Security System Using Microcontroller 8051: Project Synopsis OndeepeshPas encore d'évaluation
- 2.1 LPC2129 Microcontroller: 2.1.1 FeaturesDocument14 pages2.1 LPC2129 Microcontroller: 2.1.1 FeaturesBhaskar Rao PPas encore d'évaluation
- Department of Electronics & Communication Engineering Lab Manual B.Tech Year: 3rd Semester: VIDocument53 pagesDepartment of Electronics & Communication Engineering Lab Manual B.Tech Year: 3rd Semester: VImacfready100% (1)
- 24 LC 32Document14 pages24 LC 32Shuchi Raju AgrawalPas encore d'évaluation
- Mpi ReportDocument20 pagesMpi ReportHoorain SajjadPas encore d'évaluation
- Serial Data Transmission Vs Parallel Data Transmission: Unit 5Document16 pagesSerial Data Transmission Vs Parallel Data Transmission: Unit 5achuu1987Pas encore d'évaluation
- 8051 CH10Document93 pages8051 CH10Murali KrishnaPas encore d'évaluation
- Internet of Things Lab Manual Up DateDocument53 pagesInternet of Things Lab Manual Up DateASHU KPas encore d'évaluation
- University Automoma of Queretaro Engineering Faculty: Digital System 2Document15 pagesUniversity Automoma of Queretaro Engineering Faculty: Digital System 2Carlos Eduardo Martínez Hernández100% (1)
- ATxmega 128 A3 UDocument141 pagesATxmega 128 A3 UsanapashokPas encore d'évaluation
- Datasheet 1ATMEL MicrocontrolerDocument186 pagesDatasheet 1ATMEL Microcontrolerida_susantiPas encore d'évaluation
- Sagatave EksamenamDocument4 pagesSagatave EksamenamJurijs ŠinkevičsPas encore d'évaluation
- EEprom 24 C65Document25 pagesEEprom 24 C65ESKALENOPas encore d'évaluation
- SFG R303A User ManualDocument24 pagesSFG R303A User ManualrajudpPas encore d'évaluation
- Serial UART Communication Using MicrocontrollerDocument12 pagesSerial UART Communication Using MicrocontrollerGaurav Gupta100% (1)
- Amm Cheet PrintDocument7 pagesAmm Cheet PrintjokerPas encore d'évaluation
- Two-Wire Serial EEPROM: FeaturesDocument28 pagesTwo-Wire Serial EEPROM: FeaturesdobsrdjanPas encore d'évaluation
- ESD1Document227 pagesESD1Mr. RAVI KUMAR IPas encore d'évaluation
- Es 1Document60 pagesEs 1vamsi kiranPas encore d'évaluation
- D1 Board - ENDocument23 pagesD1 Board - ENironigna7Pas encore d'évaluation
- 8085 Features, Signal DescriptionDocument13 pages8085 Features, Signal DescriptionRakesh Kumar DPas encore d'évaluation
- 64K 5.0V I C Smart Serial Eeprom: FeaturesDocument16 pages64K 5.0V I C Smart Serial Eeprom: FeaturesFerner BriceñoPas encore d'évaluation
- Sinclair QL Service Manual - Sinclair ResearchDocument45 pagesSinclair QL Service Manual - Sinclair Researchabo alasrarPas encore d'évaluation
- Project 2Document19 pagesProject 2Gaurav BaluPas encore d'évaluation
- Doc-A.14-Text Editor On A LCD Using At89c51 Micro Controller and KeyboardDocument48 pagesDoc-A.14-Text Editor On A LCD Using At89c51 Micro Controller and KeyboardRockson Kwame AgyemanPas encore d'évaluation
- Messenger Development Without Internet Using Zigbee TechnologyDocument89 pagesMessenger Development Without Internet Using Zigbee TechnologyRaghu ReddyPas encore d'évaluation
- Vision™ OPLC™: V350-35-RA22/V350-J-RA22 Technical SpecificationsDocument7 pagesVision™ OPLC™: V350-35-RA22/V350-J-RA22 Technical SpecificationsAdélio MirandaPas encore d'évaluation
- Doc4127 PDFDocument121 pagesDoc4127 PDFLovelySinghPas encore d'évaluation
- Two-Wire Serial EEPROM 32K (4096 X 8) 64K (8192 X 8) AT24C32A AT24C64ADocument22 pagesTwo-Wire Serial EEPROM 32K (4096 X 8) 64K (8192 X 8) AT24C32A AT24C64ASergioPas encore d'évaluation
- Paper By:: Thunuguntla Gayathri Vusthepalli SravaniDocument7 pagesPaper By:: Thunuguntla Gayathri Vusthepalli SravaniNaga Neelima ThunuguntlaPas encore d'évaluation
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960D'EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Pas encore d'évaluation
- Digital Signal Processing: Instant AccessD'EverandDigital Signal Processing: Instant AccessÉvaluation : 3.5 sur 5 étoiles3.5/5 (2)
- English Dissertation ExamplesDocument7 pagesEnglish Dissertation ExamplesWriteMyEnglishPaperForMeUK100% (1)
- 003 Arch3Document1 page003 Arch3kingjam dimacaling2019Pas encore d'évaluation
- Unit 6: Asset AccountingDocument22 pagesUnit 6: Asset AccountingJose Rengifo LeonettPas encore d'évaluation
- Come To Take Our Quick Survey Now. Let's Make Tapo Better!: How To View Tapo Camera On PC Through RTSP Stream?Document7 pagesCome To Take Our Quick Survey Now. Let's Make Tapo Better!: How To View Tapo Camera On PC Through RTSP Stream?fidarasiPas encore d'évaluation
- PHD Literature Review LengthDocument7 pagesPHD Literature Review Lengthea3vk50y100% (1)
- Science A STEM Approach RIC Publications Lesson Six Chemical Sciences A Matter of Change Year 5Document5 pagesScience A STEM Approach RIC Publications Lesson Six Chemical Sciences A Matter of Change Year 5Neil MenezesPas encore d'évaluation
- Accounting Information System: Expenditure CycleDocument11 pagesAccounting Information System: Expenditure CycleSophia Marie BesorioPas encore d'évaluation
- Chapter 2 Java AppletDocument24 pagesChapter 2 Java Appleteyobeshete16Pas encore d'évaluation
- Ee3tr4 Lab 3Document3 pagesEe3tr4 Lab 3RezaPas encore d'évaluation
- And Classroom Surveillance: Prepared By: John Ernest J. BunuanDocument8 pagesAnd Classroom Surveillance: Prepared By: John Ernest J. BunuanHu T. BunuanPas encore d'évaluation
- Hilti Catalog 2011Document187 pagesHilti Catalog 2011Ramez YassaPas encore d'évaluation
- BOQ - Project BatangasDocument3 pagesBOQ - Project BatangasViktoria YumangPas encore d'évaluation
- Thesis Title Web ApplicationDocument6 pagesThesis Title Web Applicationmandyhebertlafayette100% (2)
- Catalogue of ShunliDocument18 pagesCatalogue of Shunliange_cPas encore d'évaluation
- Diseño de Paneles FrontalesDocument23 pagesDiseño de Paneles FrontalesBrayan PatachiPas encore d'évaluation
- Bachelor Thesis Ideas Computer ScienceDocument6 pagesBachelor Thesis Ideas Computer Sciencedwt65fcw100% (2)
- Probability of Bit Error For BPSK Modulation in An Awgn ChannelDocument15 pagesProbability of Bit Error For BPSK Modulation in An Awgn Channel210ec3288Pas encore d'évaluation
- Year 8 Fractions and PercentagesDocument20 pagesYear 8 Fractions and PercentagessanduedPas encore d'évaluation
- JLHBMS & JLHBMS-CPS High Bay Linear Series Spec SheetDocument3 pagesJLHBMS & JLHBMS-CPS High Bay Linear Series Spec SheetAbner AguileraPas encore d'évaluation
- Emg 707 Instruction de Montage en 29250Document4 pagesEmg 707 Instruction de Montage en 29250Arturo VelázquezPas encore d'évaluation
- Concept Paper HahaDocument6 pagesConcept Paper Haharcyclbn2Pas encore d'évaluation
- Nissan-X-Trail 2005Document36 pagesNissan-X-Trail 2005ryanto wawan noviarnoPas encore d'évaluation
- Virtual InstrumentationDocument18 pagesVirtual InstrumentationAkansha Sharma67% (3)
- A 1-D Theoretical Receiving Model For CMUT: November 2008Document7 pagesA 1-D Theoretical Receiving Model For CMUT: November 2008Hehe JeansPas encore d'évaluation
- EXPERIMENTAL ANALYSIS OF CENTRIFUGAL BLOWER WITH BACKWARD FORWARD AND RADIAL CURVED VANE Ijariie7400Document10 pagesEXPERIMENTAL ANALYSIS OF CENTRIFUGAL BLOWER WITH BACKWARD FORWARD AND RADIAL CURVED VANE Ijariie7400Mohammed Asif Kattimani MechanicalPas encore d'évaluation
- csc447 ln015Document19 pagescsc447 ln015Harry DalidaPas encore d'évaluation
- 15 Client Services Manager Interview Questions and AnswersDocument8 pages15 Client Services Manager Interview Questions and AnswersDiana HurtadoPas encore d'évaluation
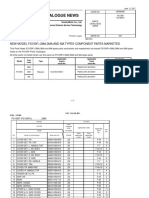
- Parts Catalogue News: New Model Fs150F - 2MA, 3MA and Ma Types Component Parts-MarketedDocument17 pagesParts Catalogue News: New Model Fs150F - 2MA, 3MA and Ma Types Component Parts-MarketedJimanx Haziman100% (1)
- Business Case TemplateDocument20 pagesBusiness Case TemplateMichaelPas encore d'évaluation
- CN Manu Sg303745557590a41 e 1000164105-03Document60 pagesCN Manu Sg303745557590a41 e 1000164105-03heruono sitorusPas encore d'évaluation