Vous aimerez peut-être aussi
- Manual de Motor para El AscensorDocument76 pagesManual de Motor para El AscensorFranco Vittok HernandezPas encore d'évaluation
- Manual de Uso ReishauerDocument23 pagesManual de Uso ReishauerManuel CardozoPas encore d'évaluation
- Aprobacion de Proyecto de Investigacion Aires AcondicionadoDocument2 pagesAprobacion de Proyecto de Investigacion Aires AcondicionadoEVA MORAPas encore d'évaluation
- Electro CanalDocument45 pagesElectro CanalJavier Alejandro QuingaPas encore d'évaluation
- Codigo Deportivo InternacionalDocument52 pagesCodigo Deportivo InternacionalCristopher AvejaresPas encore d'évaluation
- Termopar Tipo KDocument4 pagesTermopar Tipo KManuel NascimentoPas encore d'évaluation
- Sesao Examen FinalDocument15 pagesSesao Examen FinalLucas HerreraPas encore d'évaluation
- Túnel de VientoDocument18 pagesTúnel de VientoGerman Jose Parada ValverdePas encore d'évaluation
- Guia Tecnica para El Proceso de Eleccion de Los Delegados y Delegadas de PrevencionDocument6 pagesGuia Tecnica para El Proceso de Eleccion de Los Delegados y Delegadas de PrevencionEduardo MendezPas encore d'évaluation
- Manual CworksDocument17 pagesManual CworksDíaz Juan Xavier100% (2)
- Trabajo de Gestión de MantenimientoDocument3 pagesTrabajo de Gestión de MantenimientoAlex Wagner Acuña BardalesPas encore d'évaluation
- Diagrama Relacional de Recorridos 1Document1 pageDiagrama Relacional de Recorridos 1ANA MONICA RODRIGO JUSTOPas encore d'évaluation
- Diagramas de Flujo PDFDocument8 pagesDiagramas de Flujo PDFPaola RevolloPas encore d'évaluation
- Conceptos Basicos PLCDocument37 pagesConceptos Basicos PLCpicazzo78Pas encore d'évaluation
- Accptor Coin DG600FDocument21 pagesAccptor Coin DG600FMichael'o RobayoPas encore d'évaluation
- Capacitación DTADocument6 pagesCapacitación DTAPiPêÄvêŋdañoPas encore d'évaluation
- Puerto SerialDocument16 pagesPuerto SerialStalin Camino RuizPas encore d'évaluation
- Distribución de FrecuenciasDocument11 pagesDistribución de FrecuenciasPaulangelica Susana Rodas de Urrutia100% (1)
- Tema 1 Estructura y Cristalización de Los MetalesDocument115 pagesTema 1 Estructura y Cristalización de Los MetalesEduardo SucrePas encore d'évaluation
- Trabajo Pract 2Document3 pagesTrabajo Pract 2Hector J. Moscoso RoquePas encore d'évaluation
- Actividades de Mantenimiento - Tableros EléctricosDocument5 pagesActividades de Mantenimiento - Tableros Eléctricoscacr_72Pas encore d'évaluation
- Asignación de Personal TAREADocument6 pagesAsignación de Personal TAREAJavier SifuentesPas encore d'évaluation
- ACTA DE MANTENIMIENTO Bloque 20 Esc 1 UD5 17-09-2020Document8 pagesACTA DE MANTENIMIENTO Bloque 20 Esc 1 UD5 17-09-2020Anthony Rafaga OrtizPas encore d'évaluation
- Erlo TC 25 30 ManualDocument15 pagesErlo TC 25 30 ManualElisa LoorPas encore d'évaluation
- Accionamiento ElectricosDocument17 pagesAccionamiento ElectricosnataliPas encore d'évaluation
- Flip Flop DDocument10 pagesFlip Flop DDaniel Castillo Viveros100% (1)
- Informe 2 Dispositivos ElectronicosDocument12 pagesInforme 2 Dispositivos ElectronicosluisPas encore d'évaluation
- Sitescan 123Document6 pagesSitescan 123ivanPas encore d'évaluation
- Maquinas Herramientas ConsultaDocument7 pagesMaquinas Herramientas ConsultaLeNin CaiCedoPas encore d'évaluation
- Controlador Proporcional-IntegralDocument11 pagesControlador Proporcional-IntegralAldo SilveroPas encore d'évaluation
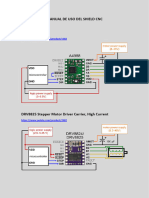
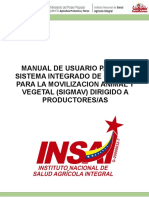
- Manual de Uso Del Shield CNCDocument3 pagesManual de Uso Del Shield CNCFrank Ronneseth DionicioPas encore d'évaluation
- Amplificador Expandible de Potencia (Hasta 1500W) PDFDocument1 pageAmplificador Expandible de Potencia (Hasta 1500W) PDFKandeke DaviesPas encore d'évaluation
- Circulacion Del Agua Dentro de La CalderaDocument1 pageCirculacion Del Agua Dentro de La CalderaingmecnavPas encore d'évaluation
- Diseño e Implementación de Un Prototipo de Router CNC Portátil para El Maquinado de Superficies de MaderaDocument171 pagesDiseño e Implementación de Un Prototipo de Router CNC Portátil para El Maquinado de Superficies de MaderaEverAngelPas encore d'évaluation
- SoluciónT2 2022Document2 pagesSoluciónT2 2022jorge ramos velasquezPas encore d'évaluation
- Manual para Registrarse en SigmavDocument13 pagesManual para Registrarse en SigmavArturo Jimenez100% (2)
- Cohetes de Combustible Sólido Su Relación Con La TermodinámicaDocument5 pagesCohetes de Combustible Sólido Su Relación Con La TermodinámicaSuker RodríguezPas encore d'évaluation
- CLS Laboratorio Dirigido3Document8 pagesCLS Laboratorio Dirigido3OscarNWCasteloPas encore d'évaluation
- Control Practica 1Document28 pagesControl Practica 1Arguijo Sergio MiguelPas encore d'évaluation
- Guía No. 2 - Instrumentos de Medición - Pie de ReyDocument10 pagesGuía No. 2 - Instrumentos de Medición - Pie de ReyLopez Poveda100% (1)
- Maquina Fresadora HorizontalDocument42 pagesMaquina Fresadora HorizontalJosé LuisPas encore d'évaluation
- Dokumen - Tips - Manual de Motor para El Ascensorpdf PDFDocument73 pagesDokumen - Tips - Manual de Motor para El Ascensorpdf PDFAnonymous wRhGOUBePas encore d'évaluation
- TCD 2012/2013 2V 03123762 Manual de Operacion DEUTZDocument84 pagesTCD 2012/2013 2V 03123762 Manual de Operacion DEUTZMartinez Valladares Oscar100% (22)
- ZF Servoplan EsDocument19 pagesZF Servoplan EsGérman BrañezPas encore d'évaluation
- Deutz 912 913 Manual Del OperadorDocument80 pagesDeutz 912 913 Manual Del Operadoralbertodlr79% (29)
- Manual Motor DeutzDocument64 pagesManual Motor DeutzEDUARDOLOPEZMONTES82% (22)
- Manual Mantenimiento Cyclo en EspañolDocument22 pagesManual Mantenimiento Cyclo en EspañolJose Eduardo Pailamilla RojasPas encore d'évaluation
- Manual de Instruccion DEUTZ-D2011Document80 pagesManual de Instruccion DEUTZ-D2011Maximiliano Ripoll100% (13)
- 1 Part TCD 2011Document39 pages1 Part TCD 2011moisesPas encore d'évaluation
- Anexo 3. Informacion Motor Deutz PDFDocument194 pagesAnexo 3. Informacion Motor Deutz PDFFranco Mayanga100% (1)
- DeutzDocument64 pagesDeutzLuis Pastor Alayo100% (2)
- Manual Servicio Motor Deutz 1012 - 1013Document116 pagesManual Servicio Motor Deutz 1012 - 1013LUIS100% (12)
- Manual Instrucciones Motor 1012-1013Document113 pagesManual Instrucciones Motor 1012-1013arthurpump100% (1)
- Uso y Mantenimiento NEF ElectronicoDocument37 pagesUso y Mantenimiento NEF ElectronicoCIVO CivoPas encore d'évaluation
- Majesty 400a 2007Document464 pagesMajesty 400a 2007Salvador Sánchez Millán100% (1)
- Manual de Mantencion Motores PDFDocument68 pagesManual de Mantencion Motores PDFMarco Vargas100% (1)
- Manual Motor Deuzt 914Document84 pagesManual Motor Deuzt 914Rodrigo Santibañez93% (15)
- Manual de Operacion 914 03120384Document84 pagesManual de Operacion 914 03120384Martinez Valladares Oscar50% (2)
- WEG Motores de Induccion Trifasicos de Alta y Baja Tension Linea M Rotor de Jaula Horizontales 11171351 Manual EspanolDocument63 pagesWEG Motores de Induccion Trifasicos de Alta y Baja Tension Linea M Rotor de Jaula Horizontales 11171351 Manual EspanolWillinton Pacori CaceresPas encore d'évaluation
- UF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposD'EverandUF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposÉvaluation : 5 sur 5 étoiles5/5 (1)
- Fusion Nuclear - Colegio Ingenieros 2016 - 2 - Por F VelosoDocument42 pagesFusion Nuclear - Colegio Ingenieros 2016 - 2 - Por F VelosotecelecPas encore d'évaluation
- Alto MaipoDocument30 pagesAlto MaipotecelecPas encore d'évaluation
- Compendio Adulto MayorDocument110 pagesCompendio Adulto MayortecelecPas encore d'évaluation
- Sociedad y OrganizacionDocument11 pagesSociedad y OrganizaciontecelecPas encore d'évaluation
- Protecciones y MallasDocument5 pagesProtecciones y MallastecelecPas encore d'évaluation
- Mat004 Guia Ejercicios ContextualizadosDocument24 pagesMat004 Guia Ejercicios ContextualizadostecelecPas encore d'évaluation
- Resúmen Módulo Energías RenovablesDocument1 pageResúmen Módulo Energías RenovablestecelecPas encore d'évaluation
- Turbinas PeltonDocument15 pagesTurbinas PeltontecelecPas encore d'évaluation
- Cf-Kindermann JBDocument370 pagesCf-Kindermann JBYuliana TorresPas encore d'évaluation
- CNE - OF.ORD.N809 Coordinador Electrico Nacional 02 11 2020Document1 pageCNE - OF.ORD.N809 Coordinador Electrico Nacional 02 11 2020tecelecPas encore d'évaluation
- Fuentes de EnergíaDocument15 pagesFuentes de EnergíatecelecPas encore d'évaluation
- Dia Ie SecDocument22 pagesDia Ie SectecelecPas encore d'évaluation
- Actividad Calculo de LimitesDocument2 pagesActividad Calculo de LimitestecelecPas encore d'évaluation
- DFL 4 - 2006Document139 pagesDFL 4 - 2006Djwezos Jorge MedinaPas encore d'évaluation
- CNE - OF.ORD.N809 Coordinador Electrico Nacional 02 11 2020Document1 pageCNE - OF.ORD.N809 Coordinador Electrico Nacional 02 11 2020tecelecPas encore d'évaluation
- Centrales Hidroelectricas CrackeadoDocument41 pagesCentrales Hidroelectricas CrackeadoAbel David Rodríguez Quintana100% (2)
- Libro Ley 20936 WEBDocument125 pagesLibro Ley 20936 WEBappeared14Pas encore d'évaluation
- Informe Final CCG-UC Estudio Rio de Las Chinas DGA LowRes-páginas-88-103Document16 pagesInforme Final CCG-UC Estudio Rio de Las Chinas DGA LowRes-páginas-88-103tecelecPas encore d'évaluation
- Sistema de Concesiones en ChileDocument42 pagesSistema de Concesiones en Chiletecelec100% (1)
- De Gonzalez CDocument178 pagesDe Gonzalez CJavier González100% (1)
- John J. Grainger, William D. StevensonDocument574 pagesJohn J. Grainger, William D. Stevensongoku80Pas encore d'évaluation
- Energia Distribuida Ley 20.571 PDFDocument30 pagesEnergia Distribuida Ley 20.571 PDFtecelec100% (1)
- Prueba de DigitalesDocument4 pagesPrueba de DigitalestecelecPas encore d'évaluation
- Prueba de DigitalesDocument4 pagesPrueba de DigitalestecelecPas encore d'évaluation
- Sistema de Concesiones en ChileDocument42 pagesSistema de Concesiones en Chiletecelec100% (1)
- Sistema de Concesiones en ChileDocument42 pagesSistema de Concesiones en Chiletecelec100% (1)
- NT de SyCS - 2014 - Res. Exta. 315Document202 pagesNT de SyCS - 2014 - Res. Exta. 315Kenneth YanulaquePas encore d'évaluation
- Estudios para Programación de La Seguridad y Calidad de ServicioDocument27 pagesEstudios para Programación de La Seguridad y Calidad de ServiciotecelecPas encore d'évaluation
- Bahía Conquil, PanguipulliDocument8 pagesBahía Conquil, PanguipullitecelecPas encore d'évaluation
- Guía 1 Enlace Químico (No Resuelta)Document3 pagesGuía 1 Enlace Químico (No Resuelta)4ever073Pas encore d'évaluation
- Trabajo Fisica Laboratorio 3Document5 pagesTrabajo Fisica Laboratorio 3Diego Muñeton GarcíaPas encore d'évaluation
- Ley de CoulombDocument5 pagesLey de CoulombbiancaPas encore d'évaluation
- Ejercicio 7 y 8, 1 TC Sebastian MunozDocument4 pagesEjercicio 7 y 8, 1 TC Sebastian MunozSebastian MuñozPas encore d'évaluation
- Actividad Experimental 3Document2 pagesActividad Experimental 3poshisterPas encore d'évaluation
- Dilatación Calorimetría PDFDocument3 pagesDilatación Calorimetría PDFTere AmaníPas encore d'évaluation
- BobinasDocument8 pagesBobinasJhonathan GómezPas encore d'évaluation
- Quimica Analitica Trabajo EspectrometriaDocument21 pagesQuimica Analitica Trabajo EspectrometriaZY AlexPas encore d'évaluation
- S04 Practica Induccion e InductanciaDocument1 pageS04 Practica Induccion e InductanciaCLAUDIA RUIZPas encore d'évaluation
- Leyes Básicas de La Ingeniería EléctricaDocument3 pagesLeyes Básicas de La Ingeniería EléctricaErick De LeónPas encore d'évaluation
- Capitulo 5 Motores de Corriente ContinuaDocument13 pagesCapitulo 5 Motores de Corriente ContinuaKaren CárdenasPas encore d'évaluation
- Conceptos Fundamentales de La SimulacionDocument28 pagesConceptos Fundamentales de La SimulacionEvelin F Gallardo G. GalgPas encore d'évaluation
- Descenso CrioscópicoDocument9 pagesDescenso CrioscópicoSebastián Tovar MolinaPas encore d'évaluation
- Secuencia Didactica Proa Fisica 1º MagnitudesDocument4 pagesSecuencia Didactica Proa Fisica 1º MagnitudesSusana BengoaPas encore d'évaluation
- Laboratorio Vectores 1 PhetDocument7 pagesLaboratorio Vectores 1 PhetHarry PlonesPas encore d'évaluation
- Tabela Termopar Tipo JDocument3 pagesTabela Termopar Tipo JGabriel SolinoPas encore d'évaluation
- La Paradoja de SchrödingerDocument4 pagesLa Paradoja de SchrödingerAlex100% (3)
- Organizador GráficoDocument3 pagesOrganizador GráficoMariana Luna HdezPas encore d'évaluation
- Taller Numero 1 Grupo 4Document34 pagesTaller Numero 1 Grupo 4Luis Jimenez MarinPas encore d'évaluation
- Sesion #06 Estado GaseosoDocument36 pagesSesion #06 Estado GaseosoMatevlog SergioPas encore d'évaluation
- Plan de ClaseDocument4 pagesPlan de ClaseJenifer HMPas encore d'évaluation
- Electronica VoltajesDocument5 pagesElectronica VoltajesAustin OrtegaPas encore d'évaluation
- MAYO Preguntas Dinamizadoras Unidad 3Document5 pagesMAYO Preguntas Dinamizadoras Unidad 3andrez castiPas encore d'évaluation
- Ejercicios ResueltosDocument15 pagesEjercicios ResueltosLUIS MIGUEL VASQUEZ VASQUEZ100% (1)
- Laboratorio de TorquesDocument15 pagesLaboratorio de TorquesYecid RomeroPas encore d'évaluation
- MCU y MCUV EjerciciosDocument6 pagesMCU y MCUV EjerciciosNe In0% (1)
- Ssa U1 Ea ElsaDocument3 pagesSsa U1 Ea ElsaMORGANESA100% (2)
- Tp06-Am2 2021 MSDocument4 pagesTp06-Am2 2021 MSLUCAS GOMEZPas encore d'évaluation
- Ejerc-Cinematica 02Document1 pageEjerc-Cinematica 02YeanStradaPas encore d'évaluation