Vous aimerez peut-être aussi
- Ficha Técnica Prueba CL-PTDocument3 pagesFicha Técnica Prueba CL-PTVerónica Guerra Guerra63% (19)
- Informe 3 Control DigitalDocument6 pagesInforme 3 Control DigitalNico PerezPas encore d'évaluation
- Practica 4 - Diagrama de BodeDocument5 pagesPractica 4 - Diagrama de BodeEnnio AntonioPas encore d'évaluation
- Tarea 2Document11 pagesTarea 2Ivan PintaPas encore d'évaluation
- Transformada de HilbertDocument14 pagesTransformada de HilbertZagan EngelSein Sanscœur NetzerPas encore d'évaluation
- Practica 2 Diseño Digital FI UNAMDocument7 pagesPractica 2 Diseño Digital FI UNAMLUIS BARRERAPas encore d'évaluation
- Control Digital Taller 1Document3 pagesControl Digital Taller 1Omar David Peña IbarraPas encore d'évaluation
- Informe 1 - Muestreadores y RetenedoresDocument15 pagesInforme 1 - Muestreadores y RetenedoresAmael Chacon RodriguezPas encore d'évaluation
- Laboratorio N°4Document23 pagesLaboratorio N°4Kevin Palma100% (1)
- Uso de La Transformada "Z". Cálculo Analítico y Con MatlabDocument20 pagesUso de La Transformada "Z". Cálculo Analítico y Con MatlabVictor CondoriPas encore d'évaluation
- Taller Transformada ZDocument4 pagesTaller Transformada ZAlejandro RiosPas encore d'évaluation
- Taller 1Document12 pagesTaller 1Cajamarca AlexPas encore d'évaluation
- Tarea#4 - Ejemplo de CompensadoresDocument30 pagesTarea#4 - Ejemplo de CompensadoresFrancisco Xavier Sevilla R.50% (2)
- Ejercicios Comunicaciones: Densidad Espectral de Energía y PotenciaDocument1 pageEjercicios Comunicaciones: Densidad Espectral de Energía y PotenciaJosé FabiánPas encore d'évaluation
- Informe I - UNMSM - SCII - MANDUJANODocument12 pagesInforme I - UNMSM - SCII - MANDUJANOAmerico MedinaPas encore d'évaluation
- Laboratorio N°1 - Control DigitalDocument7 pagesLaboratorio N°1 - Control DigitalEtson Heasid Tarazona CalixtoPas encore d'évaluation
- Proyecto Final Control DigitalDocument23 pagesProyecto Final Control DigitalAndrey PuentesPas encore d'évaluation
- Capitulo 1 - Función de TransferenciaDocument23 pagesCapitulo 1 - Función de TransferenciaCamilo ArcePas encore d'évaluation
- Ejercicios NyquistDocument19 pagesEjercicios Nyquistchiquitodeoz92Pas encore d'évaluation
- Muest ReoDocument160 pagesMuest ReoGonzalo SánchezPas encore d'évaluation
- Problemas SimuladosDocument6 pagesProblemas SimuladosRaúl Dylan CapchaPas encore d'évaluation
- GUIA 6 - Control PID DiscretoDocument8 pagesGUIA 6 - Control PID Discretosecarlos207600Pas encore d'évaluation
- Lab N°3 DISEÑO DE FILTROS Y ECUALIZADOR DIGITAL - PEREYRA PELÁEZ OSCAR ABELDocument26 pagesLab N°3 DISEÑO DE FILTROS Y ECUALIZADOR DIGITAL - PEREYRA PELÁEZ OSCAR ABELPaulPas encore d'évaluation
- Diagramas de NicholsDocument8 pagesDiagramas de NicholsLaura Berrout Ramos100% (1)
- Informe 3 Control DigitalDocument6 pagesInforme 3 Control DigitalFran Ayala RosasPas encore d'évaluation
- Labo1 SCD 2020B FinalDocument14 pagesLabo1 SCD 2020B FinalQuino B. JeffryPas encore d'évaluation
- DESARROLLO PRACTICA 1 Retenedor MuestreadorDocument11 pagesDESARROLLO PRACTICA 1 Retenedor MuestreadorIsmael ReyesPas encore d'évaluation
- Biestables Asincronos y SincronosDocument8 pagesBiestables Asincronos y SincronosAndres WedemeyerPas encore d'évaluation
- Trabajo Tema 04Document14 pagesTrabajo Tema 04Cärlos Månuel Seguil SolânoPas encore d'évaluation
- LABORATORIO 04 y 05 Transformada Z y Fourier AluDocument12 pagesLABORATORIO 04 y 05 Transformada Z y Fourier AluKarolaym Julieth Ruiz TorresPas encore d'évaluation
- Ejercicio 5Document3 pagesEjercicio 5ROSAS MONTALVO JESUSPas encore d'évaluation
- Informe Final 4Document20 pagesInforme Final 4Brayan VQPas encore d'évaluation
- Ejemplo #1. Ejemplo #1.: Análisis Del Lugar Geométrico de Las Raíces (LGR) Ó Método de EvansDocument42 pagesEjemplo #1. Ejemplo #1.: Análisis Del Lugar Geométrico de Las Raíces (LGR) Ó Método de EvansBrayan100% (1)
- Examen Parcial Control Digital 2021ADocument2 pagesExamen Parcial Control Digital 2021AxavierPas encore d'évaluation
- LGRDocument34 pagesLGRJose RangelPas encore d'évaluation
- Laboratorio N°3 SC2Document7 pagesLaboratorio N°3 SC2Brayan VQ100% (1)
- Laboratorio 01 PDS Señales de Tiempo DiscretoDocument29 pagesLaboratorio 01 PDS Señales de Tiempo DiscretojorgePas encore d'évaluation
- Huffman MatlabDocument2 pagesHuffman MatlabJose AGPas encore d'évaluation
- INFORME FINAL Nº4 - Sistemas DigitalesDocument21 pagesINFORME FINAL Nº4 - Sistemas DigitalesMARIO ALBERTO CCOYORI MENDOZAPas encore d'évaluation
- Preguntas y Problemas - TeoriaDocument6 pagesPreguntas y Problemas - TeoriaJosue Marcelo ChavarriaPas encore d'évaluation
- Solucion - EXAMEN FINAL DE CONTROL DIGITALDocument5 pagesSolucion - EXAMEN FINAL DE CONTROL DIGITALJuan Manuel VargasPas encore d'évaluation
- Informe Previo4 MultietapaDocument7 pagesInforme Previo4 MultietapaYuli Jaimes LlancaPas encore d'évaluation
- Ci 555 VcoDocument8 pagesCi 555 VcoGregory Isidor ViRoPas encore d'évaluation
- UNIDAD1-Digitalización y Reconstrucción de Señales - 2Document19 pagesUNIDAD1-Digitalización y Reconstrucción de Señales - 2Cesar Huamani QuispePas encore d'évaluation
- Aplicaciones Lineales Del Amplificador OperacionalDocument4 pagesAplicaciones Lineales Del Amplificador OperacionalMenaly Luzuriaga Moran0% (1)
- Control DigitalDocument10 pagesControl DigitalYoset Fran Mamani AyalaPas encore d'évaluation
- Control PID de Velocidad Del Motor DCDocument4 pagesControl PID de Velocidad Del Motor DCJherson Andrade Tenorio100% (1)
- Diagramas de BodeDocument12 pagesDiagramas de BodeAlex SuáMPas encore d'évaluation
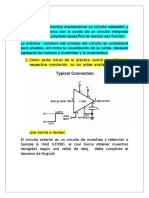
- Circuito de Disparo para Un Rectificador Trifásico Controlado Empleando SCR'sDocument4 pagesCircuito de Disparo para Un Rectificador Trifásico Controlado Empleando SCR'sJ.A. Calvillo100% (1)
- Practica 2 Máquinas de EstadoDocument27 pagesPractica 2 Máquinas de EstadoEdgar MartinezPas encore d'évaluation
- Diaz Yordy Problemas Taller2Document7 pagesDiaz Yordy Problemas Taller2DIAZ YORDYPas encore d'évaluation
- Practica 1 Latch SRDocument10 pagesPractica 1 Latch SRBrandon Vargas ChicoPas encore d'évaluation
- Problemas Tema1 SyCDocument8 pagesProblemas Tema1 SyCCarlosPas encore d'évaluation
- CAPITULO 4 - Dominio Del TiempoDocument32 pagesCAPITULO 4 - Dominio Del TiempoAndres Felipe H100% (1)
- ANALISIS SISTEMA Transformada de LaplaceDocument6 pagesANALISIS SISTEMA Transformada de LaplaceMEKArotPas encore d'évaluation
- Ets Transformada de FuncionesDocument12 pagesEts Transformada de FuncionesSadiko ArukartPas encore d'évaluation
- Problemario-Transformadas de FuncionesDocument39 pagesProblemario-Transformadas de FuncionesSadiko ArukartPas encore d'évaluation
- Ejercicios KUMON 2012 Cap1 TransfZDocument12 pagesEjercicios KUMON 2012 Cap1 TransfZangekok1Pas encore d'évaluation
- Examen Sistemas de Control Digital 2014Document18 pagesExamen Sistemas de Control Digital 2014Ruben ToledoPas encore d'évaluation
- Caa Control 1Document51 pagesCaa Control 1Matías E. PhilippPas encore d'évaluation
- MecanismoDocument9 pagesMecanismoFabiana QuinteroPas encore d'évaluation
- FITOPLANCTONDocument11 pagesFITOPLANCTONCristian Basilik CasasPas encore d'évaluation
- Trabajo DimmerDocument10 pagesTrabajo DimmerJuan RivasPas encore d'évaluation
- Movimientos E-Banking BisaDocument1 pageMovimientos E-Banking BisaAnonymous ChNVO86Pas encore d'évaluation
- Gastos AnquiseDocument15 pagesGastos AnquiseBrandon FloresPas encore d'évaluation
- ESTRUCTURAL 3pdfDocument1 pageESTRUCTURAL 3pdfYeris Alexander Abadia MendezPas encore d'évaluation
- Guia Simulacro de AdmisionDocument2 pagesGuia Simulacro de AdmisionJHONY MAYOPas encore d'évaluation
- SISTEMA DE AGUA POTABLE OkkDocument80 pagesSISTEMA DE AGUA POTABLE OkkIrving Antezana IsidroPas encore d'évaluation
- UNEPARDocument9 pagesUNEPAROscar GarcíaPas encore d'évaluation
- Pavimento 123Document24 pagesPavimento 123interurbanaPas encore d'évaluation
- Graficos en MatlabDocument2 pagesGraficos en MatlabLopez Mercado IvanPas encore d'évaluation
- Ergonomia 2 PDFDocument28 pagesErgonomia 2 PDFAngel MartinezPas encore d'évaluation
- Descripcion de Puestos Personal Operativo PDFDocument21 pagesDescripcion de Puestos Personal Operativo PDFgeny965809Pas encore d'évaluation
- 5-Modelo EOQ Con DescuentosDocument13 pages5-Modelo EOQ Con DescuentosAlejandro GómezPas encore d'évaluation
- TORTILLERÍA - LA YAQUESITA - Mayo 2011Document21 pagesTORTILLERÍA - LA YAQUESITA - Mayo 2011Lyuz DíazPas encore d'évaluation
- Capitulo 5 Ccna2 ResumenDocument33 pagesCapitulo 5 Ccna2 ResumenrectoPas encore d'évaluation
- Introducción A JSONDocument6 pagesIntroducción A JSONCesar Rios Torres0% (1)
- AccusysDocument6 pagesAccusysLuis FernandoPas encore d'évaluation
- GLACIAR Ingenier A S.A.S. - Cooling Towers - Torres de EnfriamientoDocument1 pageGLACIAR Ingenier A S.A.S. - Cooling Towers - Torres de EnfriamientoJuan Diego Suarez RiosPas encore d'évaluation
- Analisis y Reflexion Sobre Modelos Teoricos Del Proceso Salud-EnfermedadDocument8 pagesAnalisis y Reflexion Sobre Modelos Teoricos Del Proceso Salud-Enfermedaddraky12Pas encore d'évaluation
- Asistencias Tecnicas SENEGAL - Arquitectura Sin Fronteras - EspañaDocument25 pagesAsistencias Tecnicas SENEGAL - Arquitectura Sin Fronteras - EspañaASF-MADRIDPas encore d'évaluation
- Manual León MK3Document352 pagesManual León MK3AndyGonzálezPas encore d'évaluation
- Costo Supresores de PolvoDocument24 pagesCosto Supresores de PolvoWIFFO1970Pas encore d'évaluation
- Trabajo de Recoleccion de Aguas ServidasDocument34 pagesTrabajo de Recoleccion de Aguas ServidasBarinitas Calderas75% (4)
- Sobre El Procedimiento Constructivo de Pilas de Cimentacion 0Document10 pagesSobre El Procedimiento Constructivo de Pilas de Cimentacion 0RobertoPas encore d'évaluation
- Ficha Tecnica Herraje Inicio Fin Ai PDFDocument1 pageFicha Tecnica Herraje Inicio Fin Ai PDFAmericaInnovaPas encore d'évaluation
- Metodologías de Innovación Mas UsadasDocument6 pagesMetodologías de Innovación Mas UsadasJuan Pablo Amón SalinasPas encore d'évaluation
- Sistemas de Signos Otl AicherDocument5 pagesSistemas de Signos Otl Aicher690218100% (3)