Vous aimerez peut-être aussi
- Marco General y Proceso Constructivo Del Puente Allccomachay-1-25Document25 pagesMarco General y Proceso Constructivo Del Puente Allccomachay-1-25Angelo Renato Lazo ParedesPas encore d'évaluation
- Equipo6 D5E4 ForEmDocument2 pagesEquipo6 D5E4 ForEmÁngel DavidPas encore d'évaluation
- Tablas de Valor de Apiriete SugeridoDocument2 pagesTablas de Valor de Apiriete SugeridoJJ WeldingPas encore d'évaluation
- PotenciadorDocument4 pagesPotenciadorRayan UnidosPas encore d'évaluation
- Líquidos Del Gas NaturalDocument3 pagesLíquidos Del Gas NaturalDay VergaraPas encore d'évaluation
- Ficha de Inscripcion Inei 2019Document5 pagesFicha de Inscripcion Inei 2019Lourdes margarita callupe goraPas encore d'évaluation
- DMTA 10072 01ES - Rev - C Vanta User PDFDocument168 pagesDMTA 10072 01ES - Rev - C Vanta User PDFcristosferPas encore d'évaluation
- Historia de La CalidadDocument2 pagesHistoria de La CalidadCrystell Aguilar CarballoPas encore d'évaluation
- Como Acceder Por Wan Con El DVR (En Español)Document3 pagesComo Acceder Por Wan Con El DVR (En Español)fernando_12Pas encore d'évaluation
- Motor Stirling TerminadoDocument19 pagesMotor Stirling TerminadoAdriana Leiva DezaPas encore d'évaluation
- Ejercicios de Práctica Interes CompuestoDocument2 pagesEjercicios de Práctica Interes CompuestoRosita Angelica BrionesPas encore d'évaluation
- 6.-Unidad Ii Tema 3 Metodos de Levantamientos Con Transito y LongimetroDocument9 pages6.-Unidad Ii Tema 3 Metodos de Levantamientos Con Transito y LongimetronaborPas encore d'évaluation
- S8 - Díaz Castillo Jesús - Ecología y Desarrollo SostenibleDocument6 pagesS8 - Díaz Castillo Jesús - Ecología y Desarrollo SostenibleKatia FiorelaPas encore d'évaluation
- Caso ChipotleDocument7 pagesCaso ChipotleJuanRaPas encore d'évaluation
- S10.s1. Caso Práctico en Clase.Document6 pagesS10.s1. Caso Práctico en Clase.Nathaly LooezPas encore d'évaluation
- Guía Inicial para Principiantes Amazon FBADocument10 pagesGuía Inicial para Principiantes Amazon FBAFabian DieghiPas encore d'évaluation
- Catalogo CinduDocument78 pagesCatalogo CinduIrma Galego Paz75% (4)
- Teologia Politica e ImagenDocument13 pagesTeologia Politica e ImagenivanpintoveasPas encore d'évaluation
- Topic 5 - MetalesDocument9 pagesTopic 5 - MetaleslunademarinaPas encore d'évaluation
- GEOMEMBRANASDocument15 pagesGEOMEMBRANASFranki CamposPas encore d'évaluation
- Metacognicion MartiDocument25 pagesMetacognicion MartiCristian Martin JofrePas encore d'évaluation
- Solicitud de Revocatoria DirectaDocument7 pagesSolicitud de Revocatoria DirectaLuis Manuel Padaui OrtizPas encore d'évaluation
- Brenda (11 y 12)Document7 pagesBrenda (11 y 12)Daniel AlonsoPas encore d'évaluation
- Presupuesto Del Emprendimiento El Criollin Grupo 11Document4 pagesPresupuesto Del Emprendimiento El Criollin Grupo 11Alvaro Choque PeredoPas encore d'évaluation
- Cienaga AmbientalDocument21 pagesCienaga AmbientalBaltasar Herrera RoviraPas encore d'évaluation
- Informe Diagrama Sinoptico Del ProcesoDocument5 pagesInforme Diagrama Sinoptico Del ProcesoRosa mariaPas encore d'évaluation
- Informe Diagnostico (Parque San Cristobal) PDFDocument10 pagesInforme Diagnostico (Parque San Cristobal) PDFArnold VillarPas encore d'évaluation
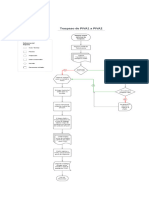
- Procesos de Envios de PIVA1 A PIVA2Document1 pageProcesos de Envios de PIVA1 A PIVA2casa.maravillas273Pas encore d'évaluation
- Requerimiento-Residente de ObraDocument5 pagesRequerimiento-Residente de ObraCesar Quispe MolinaPas encore d'évaluation
- 6 Teorema de Superposición - FINALDocument6 pages6 Teorema de Superposición - FINALCarmen BallestaPas encore d'évaluation