Vous aimerez peut-être aussi
- PSK Demodulation (Part 1)Document10 pagesPSK Demodulation (Part 1)particlereddyPas encore d'évaluation
- Razavi PLL TutorialDocument39 pagesRazavi PLL TutorialbsrathorPas encore d'évaluation
- Self-Recovering Equalization and Carrier Tracking in Two-Dimensional Data Communication SystemsDocument9 pagesSelf-Recovering Equalization and Carrier Tracking in Two-Dimensional Data Communication SystemsMANISH KUMARPas encore d'évaluation
- Predicting Non LINEAR dISTORTIONDocument10 pagesPredicting Non LINEAR dISTORTIONKandu SahibPas encore d'évaluation
- A Variable Rate Transmission For RayleighDocument8 pagesA Variable Rate Transmission For Rayleighlavanyakdp79Pas encore d'évaluation
- Synchronization in IEEE 802.15.4 Zigbee Transceiver Using Matlab SimulinkDocument5 pagesSynchronization in IEEE 802.15.4 Zigbee Transceiver Using Matlab SimulinktestePas encore d'évaluation
- Novel Study On Paprs Reduction in Wavelet-Based Multicarrier Modulation SystemsDocument8 pagesNovel Study On Paprs Reduction in Wavelet-Based Multicarrier Modulation Systemsbavar88Pas encore d'évaluation
- Overspread Digital Transmission Over Wireless Linear Time-Varying MIMO SystemsDocument13 pagesOverspread Digital Transmission Over Wireless Linear Time-Varying MIMO SystemsRaghavendra Prasad ReddyPas encore d'évaluation
- IEEE - Modeling Guidelines For Switching TransientsDocument24 pagesIEEE - Modeling Guidelines For Switching TransientsgustavopaloPas encore d'évaluation
- Analysis: SimulationDocument4 pagesAnalysis: Simulationthuhienptit2003Pas encore d'évaluation
- Razavi Monolithic Phase-Locked Loops and Clock Recovery CircuitsDocument39 pagesRazavi Monolithic Phase-Locked Loops and Clock Recovery CircuitsAhmedEssa89Pas encore d'évaluation
- Joint Optimization of Transceivers With Fractionally Spaced EqualizersDocument4 pagesJoint Optimization of Transceivers With Fractionally Spaced EqualizersVipin SharmaPas encore d'évaluation
- Certain Topics in Telegraph Transmission Theory - H. NyquistDocument28 pagesCertain Topics in Telegraph Transmission Theory - H. NyquistlisusedPas encore d'évaluation
- Symbol Timing Recovery Fo A Class of Constant Envelope SignalsDocument4 pagesSymbol Timing Recovery Fo A Class of Constant Envelope Signalsjoe2001coolPas encore d'évaluation
- Magnitude Modulation For VSAT's Low Back-Off TransmissionDocument14 pagesMagnitude Modulation For VSAT's Low Back-Off TransmissionsndkPas encore d'évaluation
- The WSSUS Pulse Design Problem in Multi Carrier TransmissionDocument24 pagesThe WSSUS Pulse Design Problem in Multi Carrier Transmissionhouda88atPas encore d'évaluation
- Carrier and Timing Synchronization of BPSK Via LDPC Code FeedbackDocument5 pagesCarrier and Timing Synchronization of BPSK Via LDPC Code FeedbackJamil AhmadPas encore d'évaluation
- 1999-Lausanne StroblDocument9 pages1999-Lausanne StroblMiten ThakkarPas encore d'évaluation
- Optimal STBC Precoding With Channel Covariance Feedback For Minimum Error ProbabilityDocument18 pagesOptimal STBC Precoding With Channel Covariance Feedback For Minimum Error ProbabilityManuel VasquezPas encore d'évaluation
- Analytical Description of Signal Characteristics and Interference For Time Hopped UWB SystemDocument5 pagesAnalytical Description of Signal Characteristics and Interference For Time Hopped UWB SystemΓιώργος ΤσιτσίκαςPas encore d'évaluation
- Digital Equalization of Chromatic Dispersion and Polarization Mode DispersionDocument11 pagesDigital Equalization of Chromatic Dispersion and Polarization Mode DispersionAliAzarniaPas encore d'évaluation
- DDJ 10GDocument4 pagesDDJ 10GaneeshdPas encore d'évaluation
- Simulation of Transients in Unerground Cables With Frequency Dependent ModalDocument12 pagesSimulation of Transients in Unerground Cables With Frequency Dependent ModalMadhusudhan Srinivasan100% (1)
- Jitter Based Delay Boundary Prediction of Wide-Area NetworksDocument14 pagesJitter Based Delay Boundary Prediction of Wide-Area NetworksebudhyPas encore d'évaluation
- Quadrature Amplitude ModulationDocument10 pagesQuadrature Amplitude ModulationMheLz LlanoPas encore d'évaluation
- Comparison of ModulationDocument6 pagesComparison of ModulationrakshitharaviPas encore d'évaluation
- Fast Computation of Channel-Estimate Based Equalizers in Packet Data TransmissionDocument24 pagesFast Computation of Channel-Estimate Based Equalizers in Packet Data TransmissionSen ZhangPas encore d'évaluation
- Paper 5Document5 pagesPaper 5d20l211Pas encore d'évaluation
- Term Paper of EleDocument8 pagesTerm Paper of Eleshailesh singhPas encore d'évaluation
- Shanthi PavanDocument12 pagesShanthi PavanAasif HameedPas encore d'évaluation
- Jecet: Journal of Electronics and Communication Engineering & Technology (JECET)Document6 pagesJecet: Journal of Electronics and Communication Engineering & Technology (JECET)IAEME PublicationPas encore d'évaluation
- Designing Bang-Bang PLLs For Clock and Data Recovery in Serial Data Transmission SystemsDocument12 pagesDesigning Bang-Bang PLLs For Clock and Data Recovery in Serial Data Transmission SystemsSaiKashyapPas encore d'évaluation
- 2Document11 pages2Pacha MamiPas encore d'évaluation
- Ren VLSI07Document2 pagesRen VLSI07jainarayanPas encore d'évaluation
- An Analysis of Pilot Symbol Assisted Modulation Rayleigh Fading ChannelsDocument8 pagesAn Analysis of Pilot Symbol Assisted Modulation Rayleigh Fading ChannelsjdnfjngsPas encore d'évaluation
- Cramer Round RaoDocument8 pagesCramer Round RaoJj KumarPas encore d'évaluation
- Channel Estimation With Superimposed Pilot SequenceDocument5 pagesChannel Estimation With Superimposed Pilot SequencelfklasPas encore d'évaluation
- K Pruthvi Krishna Roll. No. 144607 M.tech (ACS) I-II SEM: CSM Assignment - 2Document10 pagesK Pruthvi Krishna Roll. No. 144607 M.tech (ACS) I-II SEM: CSM Assignment - 2edurubirraPas encore d'évaluation
- Decode-and-Forward Cooperative Communications: Performance Analysis With Power Constraints in The Presence of Timing ErrorsDocument13 pagesDecode-and-Forward Cooperative Communications: Performance Analysis With Power Constraints in The Presence of Timing ErrorsamanofgodPas encore d'évaluation
- Three-Level Optimized Pulse Patterns For Grid-Connected Converters With LCL FiltersDocument8 pagesThree-Level Optimized Pulse Patterns For Grid-Connected Converters With LCL FiltersRodovarPas encore d'évaluation
- Generalized Averaging Method For Power Conversion Circuits: Seth R. Sanders, Z. Liu, and George C - VergheseDocument9 pagesGeneralized Averaging Method For Power Conversion Circuits: Seth R. Sanders, Z. Liu, and George C - VergheseLazaro S. EscalantePas encore d'évaluation
- An Analytical Method For Calculating The Bit Error Rate Performance of Rake Reception in UWB Multipath Fading ChannelsDocument9 pagesAn Analytical Method For Calculating The Bit Error Rate Performance of Rake Reception in UWB Multipath Fading Channelstqminh25Pas encore d'évaluation
- Voelcker 1960Document8 pagesVoelcker 1960FAKHRI AhmedPas encore d'évaluation
- On Channel Estimation in OFDM SystemsDocument5 pagesOn Channel Estimation in OFDM SystemsSoumitra BhowmickPas encore d'évaluation
- A Fast Adaptive Tomlinson-Harashima Precoder For Indoor Wireless CommunicationsDocument4 pagesA Fast Adaptive Tomlinson-Harashima Precoder For Indoor Wireless CommunicationsJunaid Iqbal AwanPas encore d'évaluation
- D 119Document35 pagesD 119Mohammad Ayatullah MaktoomPas encore d'évaluation
- Digital Differential Relaying Scheme For Teed Circuits Based On Voltage and Current Signal ComparisonDocument10 pagesDigital Differential Relaying Scheme For Teed Circuits Based On Voltage and Current Signal ComparisonKumar DhirajPas encore d'évaluation
- Cfpaper2009 07Document4 pagesCfpaper2009 07Μάριος ΗλίαPas encore d'évaluation
- An Analysis of Pilot Symbol Assisted Modulation Rayleigh Fading ChannelsDocument8 pagesAn Analysis of Pilot Symbol Assisted Modulation Rayleigh Fading ChannelsBrijesh GuptaPas encore d'évaluation
- Line Coded Modulation: One Binary One Ternary Phase Shift Keying (1B1TPSK)Document4 pagesLine Coded Modulation: One Binary One Ternary Phase Shift Keying (1B1TPSK)bahman_ramadanPas encore d'évaluation
- Performance of Coarse and Fine Timing Synchronization in OFDM ReceiversDocument5 pagesPerformance of Coarse and Fine Timing Synchronization in OFDM ReceiversHossam AsranPas encore d'évaluation
- Phase AccumulatorsDocument4 pagesPhase AccumulatorsMuhammad AbbasPas encore d'évaluation
- Isit 2003Document1 pageIsit 2003wonsyoonPas encore d'évaluation
- MIMO HSDPA Throughput Measurement Results in An Urban ScenarioDocument6 pagesMIMO HSDPA Throughput Measurement Results in An Urban ScenarioAna Sofia FernandesPas encore d'évaluation
- Eurofgi Workshop On Ip Qos and Traffic Control P. Pereira (Ed.) Lisbon, Portugal, December 6-7, 2007Document8 pagesEurofgi Workshop On Ip Qos and Traffic Control P. Pereira (Ed.) Lisbon, Portugal, December 6-7, 2007nmtien1985Pas encore d'évaluation
- A Review On Synchronization Methods For Grid-Connected Three-Phase VSC Under Unbalanced and Distorted ConditionsDocument10 pagesA Review On Synchronization Methods For Grid-Connected Three-Phase VSC Under Unbalanced and Distorted ConditionsnmotanPas encore d'évaluation
- Pico Second Labs PDFDocument5 pagesPico Second Labs PDFVenkatesh KarriPas encore d'évaluation
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsD'EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsPas encore d'évaluation
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsD'EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsPas encore d'évaluation
- Zain Mahmood: Personal InformationDocument3 pagesZain Mahmood: Personal InformationmnotcoolPas encore d'évaluation
- Smart Street Lighting Project IntroductionDocument4 pagesSmart Street Lighting Project IntroductionmnotcoolPas encore d'évaluation
- Subject: Internship Program 2014Document1 pageSubject: Internship Program 2014mnotcoolPas encore d'évaluation
- Course Outline ADCDocument3 pagesCourse Outline ADCmnotcoolPas encore d'évaluation
- Only CH 3Document15 pagesOnly CH 3mnotcoolPas encore d'évaluation
- 500 KV Substation Grounding PresentationDocument66 pages500 KV Substation Grounding Presentationmnotcool100% (4)
- Only CH 3Document15 pagesOnly CH 3mnotcoolPas encore d'évaluation
- Potential TransformerDocument8 pagesPotential TransformermnotcoolPas encore d'évaluation
- Potential TransformerDocument8 pagesPotential TransformermnotcoolPas encore d'évaluation
- Revision: Change Description Person Responsible, Name, Signature, Date Remark Revision Index CR NumberDocument67 pagesRevision: Change Description Person Responsible, Name, Signature, Date Remark Revision Index CR NumberAung Min Htet100% (1)
- Pogil Cellular Respiration-SDocument6 pagesPogil Cellular Respiration-Sapi-262378640Pas encore d'évaluation
- Light: Chapter 5 Year 4 (KSSR) Chapter 6 Year 5 (KBSR)Document11 pagesLight: Chapter 5 Year 4 (KSSR) Chapter 6 Year 5 (KBSR)Subba KanesenPas encore d'évaluation
- Struers Application Note - Metallographic Preparation of High Alloy Tool SteelDocument6 pagesStruers Application Note - Metallographic Preparation of High Alloy Tool SteelCan ERTANPas encore d'évaluation
- VD 2Document4 pagesVD 2Hồ BảoPas encore d'évaluation
- Owner's ManualDocument208 pagesOwner's ManualChantal LilouPas encore d'évaluation
- Laplace Transformation TableDocument1 pageLaplace Transformation TableDjPas encore d'évaluation
- 60-1512-01 Data SheetDocument24 pages60-1512-01 Data SheetMohamed TawfikPas encore d'évaluation
- Cre 2Document42 pagesCre 2Sagar ChandegaraPas encore d'évaluation
- Dart Language SpecificationDocument111 pagesDart Language SpecificationLiaboPas encore d'évaluation
- Manufacture of Portland CementDocument3 pagesManufacture of Portland Cementlaura kayPas encore d'évaluation
- HV Cable Test Report 1Document3 pagesHV Cable Test Report 1prabhumanoc100% (1)
- Repeaters in CDMA and UMTS CellularDocument86 pagesRepeaters in CDMA and UMTS CellularJoseph ShapiraPas encore d'évaluation
- 10.1109 Jproc.2022.3174030Document30 pages10.1109 Jproc.2022.3174030Sree Krishna DasPas encore d'évaluation
- MTH101 TutorialDocument2 pagesMTH101 TutorialOnochie EnunwaonyePas encore d'évaluation
- Fulton Steam: FB-S SeriesDocument76 pagesFulton Steam: FB-S Seriesbth8320Pas encore d'évaluation
- δ ˆ - Closed Sets in Ideal Topological SpacesDocument12 pagesδ ˆ - Closed Sets in Ideal Topological SpacesInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Technical Data Sheet - Steel Cord FR GradeDocument2 pagesTechnical Data Sheet - Steel Cord FR Gradeamol1321Pas encore d'évaluation
- Oasismontaj TutorialnewDocument297 pagesOasismontaj TutorialnewArmando Cesar Landa FerrelPas encore d'évaluation
- ALSTOM MiCOM P442 V71 Line User Manual ENUDocument6 pagesALSTOM MiCOM P442 V71 Line User Manual ENUAbib LeyePas encore d'évaluation
- Datos JeanDocument8 pagesDatos JeanJean Carlo GuarenasPas encore d'évaluation
- Space Suit ComponentsDocument21 pagesSpace Suit ComponentsanatomykofiPas encore d'évaluation
- Genome Annotation and ToolsDocument20 pagesGenome Annotation and ToolsKumar KunalPas encore d'évaluation
- IIT AIEEE BITS Free Online Help and QuestionsDocument7 pagesIIT AIEEE BITS Free Online Help and Questionsapi-3846151Pas encore d'évaluation
- Department of Pre-University Education, Karnataka: PUC Examination Results - 2021Document1 pageDepartment of Pre-University Education, Karnataka: PUC Examination Results - 2021Sneha GowdaPas encore d'évaluation
- Topic 9 - The Standard Capital Asset Pricing Model Question PDFDocument15 pagesTopic 9 - The Standard Capital Asset Pricing Model Question PDFSrinivasa Reddy SPas encore d'évaluation
- CBIP Publication No 295Document422 pagesCBIP Publication No 295Pravin Narkhede100% (7)
- FG1100E Vs PAN 3260Document6 pagesFG1100E Vs PAN 3260Cwsta LbaumPas encore d'évaluation
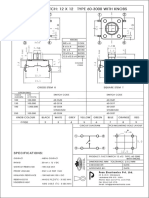
- Tact Micro Switch 12X12Document1 pageTact Micro Switch 12X12Solin CozPas encore d'évaluation