Vous aimerez peut-être aussi
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesD'EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesPas encore d'évaluation
- Sol 1Document4 pagesSol 1Joonsung LeePas encore d'évaluation
- 2 Signals and Systems: Part I: Solutions To Recommended ProblemsDocument9 pages2 Signals and Systems: Part I: Solutions To Recommended ProblemssamibdzPas encore d'évaluation
- Divide and Conquer StrategyDocument10 pagesDivide and Conquer Strategyadityabaid4Pas encore d'évaluation
- Additional material for G12MANDocument13 pagesAdditional material for G12MANwill2222Pas encore d'évaluation
- Lesson 3 Basic Sequences and Signal OperationDocument29 pagesLesson 3 Basic Sequences and Signal Operationpaulene panganPas encore d'évaluation
- Tarea1 Se AlesDocument14 pagesTarea1 Se AlesDaironDoradoCastilloPas encore d'évaluation
- Digital Signal Processing - Week5 Quiz Solutions: June 15, 2018Document6 pagesDigital Signal Processing - Week5 Quiz Solutions: June 15, 2018bita younesianPas encore d'évaluation
- Practice 2 SolutionsDocument8 pagesPractice 2 SolutionsJuan Carlos MerchanPas encore d'évaluation
- MATH2601 Chapter 3 Approximating Functions 118Document23 pagesMATH2601 Chapter 3 Approximating Functions 118Surender ReddyPas encore d'évaluation
- Solutions Fourier TransformsDocument16 pagesSolutions Fourier TransformsEduardo WatanabePas encore d'évaluation
- Digital Signal Processing by Oppenheim Home WorksDocument78 pagesDigital Signal Processing by Oppenheim Home Workslankyrck67% (3)
- MATH 101 Final Exam SolutionsDocument9 pagesMATH 101 Final Exam SolutionstehepiconePas encore d'évaluation
- Detailed Solutions A-07 JUNE 2003: I X X F F IDocument32 pagesDetailed Solutions A-07 JUNE 2003: I X X F F IAdzLinkBalaoangPas encore d'évaluation
- AEMC1Document16 pagesAEMC1Luis Miguel Castrejon EspinozaPas encore d'évaluation
- ECE 534 Random Processes Problem Set 5Document6 pagesECE 534 Random Processes Problem Set 5anthalyaPas encore d'évaluation
- Tutorial 1Document3 pagesTutorial 1Sathwik MethariPas encore d'évaluation
- Signals and Systems Chapter 1 Problems Part 2 SolutionsDocument30 pagesSignals and Systems Chapter 1 Problems Part 2 SolutionsAbdullah zxPas encore d'évaluation
- ECE216H1 2022 SolutionDocument4 pagesECE216H1 2022 SolutionhcxPas encore d'évaluation
- Control Systems Engineering D227 S.A.E. Solutions Tutorial 12 - Digital Systems Self Assessment Exercise No.1Document5 pagesControl Systems Engineering D227 S.A.E. Solutions Tutorial 12 - Digital Systems Self Assessment Exercise No.1cataicePas encore d'évaluation
- Divide Conquer 1Document30 pagesDivide Conquer 1Mithil JogiPas encore d'évaluation
- LEGENDRE POLYNOMIALSDocument6 pagesLEGENDRE POLYNOMIALSFrancis Jr CastroPas encore d'évaluation
- Tutorial 1Document3 pagesTutorial 1Ashish KatochPas encore d'évaluation
- Sol FinalDocument9 pagesSol FinalLisagouldPas encore d'évaluation
- Problem Set 1Document7 pagesProblem Set 1alfonso_bajarPas encore d'évaluation
- Fundamentals of Signals: 1.1 What Is A Signal?Document22 pagesFundamentals of Signals: 1.1 What Is A Signal?Sai KiranPas encore d'évaluation
- Assignment Template UOMDocument10 pagesAssignment Template UOMAarav 127Pas encore d'évaluation
- MITRES 6 007S11 hw04 SolDocument16 pagesMITRES 6 007S11 hw04 SolEla BhattacharyaPas encore d'évaluation
- Math 461 F Spring 2011 Homework 3 Solutions Drew ArmstrongDocument4 pagesMath 461 F Spring 2011 Homework 3 Solutions Drew ArmstrongDheliaPas encore d'évaluation
- SR 3 ExercisesDocument138 pagesSR 3 ExercisesissamPas encore d'évaluation
- CFD Problem Solutions - Unsteady FlowsDocument8 pagesCFD Problem Solutions - Unsteady FlowsZakria ToorPas encore d'évaluation
- Recurrence Relations PDFDocument16 pagesRecurrence Relations PDFSrinivasaRao JJ100% (1)
- M 408M - Calculus Quest SolutionsDocument13 pagesM 408M - Calculus Quest Solutionsbrargolf50% (2)
- Assignment Template UOMDocument19 pagesAssignment Template UOMAarav 127Pas encore d'évaluation
- Number TheoryDocument6 pagesNumber TheorymansizaveriPas encore d'évaluation
- HW1 SolutionDocument6 pagesHW1 SolutionAliBaranIşıkPas encore d'évaluation
- Assignment 1Document2 pagesAssignment 1Harry WillsmithPas encore d'évaluation
- Binomial Theorem (For A Positive Integral Index)Document2 pagesBinomial Theorem (For A Positive Integral Index)Johnny MurrayPas encore d'évaluation
- Recurrence-Relations Time ComplexityDocument14 pagesRecurrence-Relations Time ComplexitySudharsan GVPas encore d'évaluation
- Recurrence-Relations Time ComplexityDocument14 pagesRecurrence-Relations Time ComplexitySudharsan GVPas encore d'évaluation
- 2731 LectNt-rev2013Document80 pages2731 LectNt-rev2013Eduardo MullerPas encore d'évaluation
- Euclid Stage 3 Class 4 Notes on Sequences and SeriesDocument7 pagesEuclid Stage 3 Class 4 Notes on Sequences and SeriesHappy DolphinPas encore d'évaluation
- Square Roots 7Document5 pagesSquare Roots 7tomchoopperPas encore d'évaluation
- 12 3Document96 pages12 3ksr131Pas encore d'évaluation
- Calculus AB & BC Solutions 2014Document10 pagesCalculus AB & BC Solutions 2014gboover123100% (1)
- Discrete Fourier Transform PDFDocument12 pagesDiscrete Fourier Transform PDFKarina5274Pas encore d'évaluation
- Kay - SolutionsDocument47 pagesKay - Solutionsfarah727rash100% (1)
- 1.2 Review On Complex NumbersDocument3 pages1.2 Review On Complex Numbersshriram jadhavPas encore d'évaluation
- 7-5 Solution PDFDocument3 pages7-5 Solution PDFDaniel Bastos MoraesPas encore d'évaluation
- IEOR 6711: Stochastic Models I Fall 2012, Professor Whitt Solutions To Homework Assignment 6 Due On Tuesday, October 16Document7 pagesIEOR 6711: Stochastic Models I Fall 2012, Professor Whitt Solutions To Homework Assignment 6 Due On Tuesday, October 16Songya PanPas encore d'évaluation
- Complex Numbers Additional Notes 1Document11 pagesComplex Numbers Additional Notes 1Jade GurtizaPas encore d'évaluation
- 1 IEOR 4700: Notes On Brownian Motion: 1.1 Normal DistributionDocument11 pages1 IEOR 4700: Notes On Brownian Motion: 1.1 Normal DistributionshrutigarodiaPas encore d'évaluation
- Shooting Method 5Document7 pagesShooting Method 5مرتضى عباسPas encore d'évaluation
- Assignment 3: Shahrzad Tighnavardmollasaraei 260413622 February 29, 2012Document3 pagesAssignment 3: Shahrzad Tighnavardmollasaraei 260413622 February 29, 2012Neev TighnavardPas encore d'évaluation
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)D'EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Pas encore d'évaluation
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsD'EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsÉvaluation : 5 sur 5 étoiles5/5 (1)
- De Moiver's Theorem (Trigonometry) Mathematics Question BankD'EverandDe Moiver's Theorem (Trigonometry) Mathematics Question BankPas encore d'évaluation
- Quiz 1 SolDocument22 pagesQuiz 1 SolEmPas encore d'évaluation
- Quiz 1 SolDocument22 pagesQuiz 1 SolEmPas encore d'évaluation
- Ps 2 SolDocument29 pagesPs 2 SolEmPas encore d'évaluation
- DSP Slides Module8 0Document270 pagesDSP Slides Module8 0EmPas encore d'évaluation
- Ps 4 SolDocument23 pagesPs 4 SolEmPas encore d'évaluation
- DSP Slides Module9 0Document354 pagesDSP Slides Module9 0EmPas encore d'évaluation
- Ps 5 SolDocument20 pagesPs 5 SolEmPas encore d'évaluation
- DSP Slides Module7 0Document159 pagesDSP Slides Module7 0EmPas encore d'évaluation
- Reliable digital comms of discrete infoDocument147 pagesReliable digital comms of discrete infoEmPas encore d'évaluation
- Cell Cycle: Need To "Get" The Basics of Mitosis FirstDocument22 pagesCell Cycle: Need To "Get" The Basics of Mitosis FirstEmPas encore d'évaluation
- LshortDocument171 pagesLshortCXBBAPas encore d'évaluation
- Beamer User GuideDocument245 pagesBeamer User GuideColossus RhodesPas encore d'évaluation
- PDC Chap4Document32 pagesPDC Chap4EmPas encore d'évaluation
- Convolutional Coding and Viterbi Decoding ExplainedDocument30 pagesConvolutional Coding and Viterbi Decoding ExplainedEmPas encore d'évaluation
- PDC Chap5Document42 pagesPDC Chap5EmPas encore d'évaluation
- PDC Chap2Document74 pagesPDC Chap2EmPas encore d'évaluation
- PDC Chap3Document30 pagesPDC Chap3EmPas encore d'évaluation
- PDC Chap1Document26 pagesPDC Chap1EmPas encore d'évaluation
- Matlab IiDocument40 pagesMatlab IiJin Hwan JangPas encore d'évaluation
- Mathematics of The Discrete Fourier Transform MathematicsDocument247 pagesMathematics of The Discrete Fourier Transform MathematicsEm100% (1)
- MatlabDocument182 pagesMatlabEmPas encore d'évaluation
- Problem Set 1 - EDCDocument9 pagesProblem Set 1 - EDCSatish BojjawarPas encore d'évaluation
- Blue Print For Maths Preboard Exam 2022-23Document1 pageBlue Print For Maths Preboard Exam 2022-23AnkitaPas encore d'évaluation
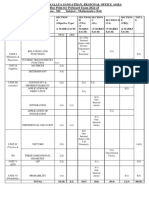
- CCSIT Time TableDocument43 pagesCCSIT Time TableAiman KhanPas encore d'évaluation
- Translating Word ProblemsDocument16 pagesTranslating Word Problemsapi-528878630Pas encore d'évaluation
- Advanced Mechanics of Solids 925cDocument425 pagesAdvanced Mechanics of Solids 925cHungryHowls ASMR100% (3)
- NCERT Solutions For Class 11 Maths Chapter 8Document24 pagesNCERT Solutions For Class 11 Maths Chapter 8Rajesh KhannaPas encore d'évaluation
- Math 122Document2 pagesMath 122Collins BichiyPas encore d'évaluation
- A Pencil-and-Paper Algorithm For Solving Sudoku Puzzles: (Reduced From Paper by JF Crook)Document3 pagesA Pencil-and-Paper Algorithm For Solving Sudoku Puzzles: (Reduced From Paper by JF Crook)Brian Paul Taboada CheroPas encore d'évaluation
- WL-TR-97-4014: 3D Boundary Element AnalysisDocument53 pagesWL-TR-97-4014: 3D Boundary Element Analysisss ssPas encore d'évaluation
- Math5 SLHTQ2W4MELC M5NS LLD LLL.LDocument7 pagesMath5 SLHTQ2W4MELC M5NS LLD LLL.LMENCHUPas encore d'évaluation
- Ace Analysis Additional Mathematics SPM - SPM Practice (Form 4, Chapter 1, Pg. 1-4) IDocument4 pagesAce Analysis Additional Mathematics SPM - SPM Practice (Form 4, Chapter 1, Pg. 1-4) I钰颖Pas encore d'évaluation
- ExamDocument7 pagesExamChau Dinh HoanPas encore d'évaluation
- Lattin James M-Analyzing Multivariate Data-Pp477-490Document15 pagesLattin James M-Analyzing Multivariate Data-Pp477-490100111Pas encore d'évaluation
- Exam C ManualDocument810 pagesExam C ManualAnonymous RNacXQ100% (1)
- F4 Modul 8 VektorDocument26 pagesF4 Modul 8 VektorHasif SolihinPas encore d'évaluation
- University Mathematics 1 by Olan I Yi EvansDocument11 pagesUniversity Mathematics 1 by Olan I Yi EvanswaktolabokaPas encore d'évaluation
- Campusgate Number System Divisibility RulesDocument16 pagesCampusgate Number System Divisibility RulesalexPas encore d'évaluation
- Pole-Zero Plots StabilityDocument9 pagesPole-Zero Plots StabilityNaveen SaiPas encore d'évaluation
- Model Paper - Grade-V - MathsDocument8 pagesModel Paper - Grade-V - Mathsmaqbool ur rehmanPas encore d'évaluation
- Presentation On Public Key CryptographyDocument29 pagesPresentation On Public Key CryptographyAdnan YusufPas encore d'évaluation
- Mark Scheme Paper C12 (WMA01) June 2014Document32 pagesMark Scheme Paper C12 (WMA01) June 2014Newton JohnPas encore d'évaluation
- Worksheet No. 1 Grade 8 - Mathematics 1st Quarter Factors Completely Different Types of PolynomialsDocument2 pagesWorksheet No. 1 Grade 8 - Mathematics 1st Quarter Factors Completely Different Types of PolynomialsKara BanzonPas encore d'évaluation
- Efficient DFT CalculationDocument9 pagesEfficient DFT Calculationapi-3695801100% (1)
- Band Theory and Bloch Theorem in Solid State PhysicsDocument8 pagesBand Theory and Bloch Theorem in Solid State PhysicsVicky VickyPas encore d'évaluation
- Recursive Matrix Multiplication Using Strassen's AlgorithmDocument4 pagesRecursive Matrix Multiplication Using Strassen's AlgorithmbsudheertecPas encore d'évaluation
- LOGIC Mashad PresentationDocument9 pagesLOGIC Mashad Presentationapi-3709182Pas encore d'évaluation
- Lesson 1.1: Introduction To Conic Sections and CirclesDocument5 pagesLesson 1.1: Introduction To Conic Sections and CirclesAerl XuanPas encore d'évaluation
- Power Series Solutions To The Legendre Equation and The Legendre PolynomialsDocument6 pagesPower Series Solutions To The Legendre Equation and The Legendre PolynomialsJimmy WernerPas encore d'évaluation