Vous aimerez peut-être aussi
- CHECK LIST DE MOLINOS - v3Document2 pagesCHECK LIST DE MOLINOS - v3ralexml0% (1)
- Diseño de CompensadoresDocument22 pagesDiseño de Compensadoresirma soriano silvaPas encore d'évaluation
- Control Por Realimentacion o FeedbackDocument27 pagesControl Por Realimentacion o FeedbackDiego Dt100% (2)
- Informe Final SciiDocument60 pagesInforme Final SciiLuis HerediaPas encore d'évaluation
- Escritos Del Último CriolloDocument205 pagesEscritos Del Último CriolloDefensor ArcanoPas encore d'évaluation
- Guia Practica para Semilleros y JuvenilesDocument33 pagesGuia Practica para Semilleros y JuvenilesALBERTOPas encore d'évaluation
- Inf Practica SeparacónDocument6 pagesInf Practica SeparacónRebecca AusterlitzPas encore d'évaluation
- Control ProporcionalDocument10 pagesControl ProporcionalKike DersúPas encore d'évaluation
- Sistemas de Controlador ProporcionalDocument5 pagesSistemas de Controlador ProporcionalRoberto Squertz LivePas encore d'évaluation
- Industria Final ExamenDocument11 pagesIndustria Final ExamenErnesto RomeroPas encore d'évaluation
- Investigacion Documental Unidad 2 Control 2Document10 pagesInvestigacion Documental Unidad 2 Control 2Miguel GarciaPas encore d'évaluation
- 9.02 Control de P, I, D, PI, PD y PIDDocument16 pages9.02 Control de P, I, D, PI, PD y PIDEdgarPalaciosCPas encore d'évaluation
- Practica 10 Sistemas de ControlDocument15 pagesPractica 10 Sistemas de ControlluisalfonsootalvaropaezPas encore d'évaluation
- ControladoresDocument32 pagesControladoresKelvin MartínezPas encore d'évaluation
- Sistemas de ControlDocument15 pagesSistemas de ControlEmiliano GodoyPas encore d'évaluation
- Modos de ControlDocument17 pagesModos de ControlFanny Plaza100% (1)
- Análisis y Diseño de Controladores en El TiempoDocument23 pagesAnálisis y Diseño de Controladores en El Tiemporoberto roblesPas encore d'évaluation
- PID2Document42 pagesPID2Kevin LopezPas encore d'évaluation
- Instrumentacion MadisonDocument41 pagesInstrumentacion MadisonMadison Arévalo LópezPas encore d'évaluation
- Control Clasico 2024Document343 pagesControl Clasico 2024Juma DrcPas encore d'évaluation
- Introducción A Los ControladoresDocument4 pagesIntroducción A Los ControladoresDaniel MartinezPas encore d'évaluation
- Estrategias de Control de ProcesosDocument6 pagesEstrategias de Control de ProcesosChRiss CarvajalPas encore d'évaluation
- Recapitulación CAP Unidad 1 Lazos de ControlDocument8 pagesRecapitulación CAP Unidad 1 Lazos de ControlRustica CuadernosPas encore d'évaluation
- Sistema de ControlDocument10 pagesSistema de ControlArismendy Estevez Nuñez100% (1)
- Reporte de Investigación Unidad 4: ControladoresDocument10 pagesReporte de Investigación Unidad 4: ControladoresIván OsorioPas encore d'évaluation
- Tipos de ControlDocument6 pagesTipos de ControlEdgar Iván Marcelo LópezPas encore d'évaluation
- Informe Examen FinalDocument15 pagesInforme Examen FinalGustavo CeccarelliPas encore d'évaluation
- Practica 1Document19 pagesPractica 1Luis BecerrilPas encore d'évaluation
- Control de Dos PosicionesDocument14 pagesControl de Dos Posicionesluis charco100% (1)
- Informe PDDocument10 pagesInforme PDERICK JES�S TAMAYO LLANTOPas encore d'évaluation
- Informe PDDocument10 pagesInforme PDERICK JES�S TAMAYO LLANTOPas encore d'évaluation
- PD, Pi, PidDocument8 pagesPD, Pi, PidAngel Garcia GalindoPas encore d'évaluation
- 0 Sistemas de ControlDocument48 pages0 Sistemas de ControlCristian Martinez RamirezPas encore d'évaluation
- Diagrama de BloquesDocument12 pagesDiagrama de BloquesRiicarDo HernanDezPas encore d'évaluation
- Teoria de ControlDocument15 pagesTeoria de ControlGabriela Abigail Lazo de la CruzPas encore d'évaluation
- Diagrama de BloquesDocument12 pagesDiagrama de BloquesNorberto SisoPas encore d'évaluation
- 2.1 Controlador de Acción Proporcional (P)Document2 pages2.1 Controlador de Acción Proporcional (P)ramonPas encore d'évaluation
- Control Realimentado de Lazos Menores Y Control Mediante Realimentación de EstadoDocument16 pagesControl Realimentado de Lazos Menores Y Control Mediante Realimentación de EstadoCarlos Ñahui UtosPas encore d'évaluation
- 3.3 Control ProporcionalDocument10 pages3.3 Control ProporcionalKevin mejiaPas encore d'évaluation
- Grados de LibertadDocument3 pagesGrados de LibertaddanixaPas encore d'évaluation
- Sistema de Control Eva4 Casi TerminadoDocument22 pagesSistema de Control Eva4 Casi TerminadoNicolas HidalgoPas encore d'évaluation
- Controlador PIDDocument10 pagesControlador PIDFiliberto Tlalpa ValdezPas encore d'évaluation
- Control Solo ProporcionalDocument18 pagesControl Solo ProporcionalFrancisco GalindoPas encore d'évaluation
- Practica 4 Control en Cascada y FeddforwareDocument11 pagesPractica 4 Control en Cascada y FeddforwareSantiNeiraPas encore d'évaluation
- Cuestionario InstrumentacionDocument9 pagesCuestionario InstrumentacionChuyínGeraldoLeónPas encore d'évaluation
- Tipos de Sistemas de Control Aplicados A ProcesosDocument35 pagesTipos de Sistemas de Control Aplicados A Procesosdanielaherondale1357Pas encore d'évaluation
- Ingenieria de Control Clasico, Presentacion Control en CascadaDocument24 pagesIngenieria de Control Clasico, Presentacion Control en Cascadaanon_993797739Pas encore d'évaluation
- Lectura Clase 1 UT1Document10 pagesLectura Clase 1 UT1C. Ponce F.Pas encore d'évaluation
- Sistemas de ControlDocument81 pagesSistemas de ControlDaniel CastañedaPas encore d'évaluation
- Unidad 4 Diseño de CompensadoresDocument13 pagesUnidad 4 Diseño de Compensadoresirma soriano silvaPas encore d'évaluation
- Clasificacion de ControladoresDocument11 pagesClasificacion de ControladoresHockenhaimPas encore d'évaluation
- Ing Control-CompensacionDocument38 pagesIng Control-CompensacionManuel LaguadoPas encore d'évaluation
- Unidad IVc - 2014Document10 pagesUnidad IVc - 2014Juan PérezPas encore d'évaluation
- Diseño de ControladoresDocument14 pagesDiseño de ControladoresLuis AyalaPas encore d'évaluation
- Control ProporcionalDocument6 pagesControl ProporcionalRoberth Martinez HaroPas encore d'évaluation
- Lab 12Document17 pagesLab 12richard ccahuana laymePas encore d'évaluation
- Diseño de Lazoz Pid Por Polos y CerosDocument19 pagesDiseño de Lazoz Pid Por Polos y Cerosavengers vengadorPas encore d'évaluation
- ME 6 ControladoresDocument29 pagesME 6 ControladoresJorgePas encore d'évaluation
- REPORTE DE ESTADO DE EQUIPOS - ANÁLISIS VIBRACIONAL - SEMANA 13 - Rev0Document1 pageREPORTE DE ESTADO DE EQUIPOS - ANÁLISIS VIBRACIONAL - SEMANA 13 - Rev0ralexmlPas encore d'évaluation
- Preguntas Cambio CulturalDocument2 pagesPreguntas Cambio CulturalralexmlPas encore d'évaluation
- Ofr KN95Document2 pagesOfr KN95ralexmlPas encore d'évaluation
- Termografia - Chancadora PrimariaDocument1 pageTermografia - Chancadora Primariaralexml100% (1)
- Reportes de Vibracion Fajas Transportadoras #2 y 4Document3 pagesReportes de Vibracion Fajas Transportadoras #2 y 4ralexmlPas encore d'évaluation
- Falla de Rodamientos - Motores ElectricosDocument7 pagesFalla de Rodamientos - Motores ElectricosralexmlPas encore d'évaluation
- Paquete 4 y 5 - Fracttal - Plan de TrabajoDocument14 pagesPaquete 4 y 5 - Fracttal - Plan de TrabajoralexmlPas encore d'évaluation
- Confiabilidad MotoresDocument100 pagesConfiabilidad MotoresJuan David Yepez Monteros100% (1)
- Seccionadores - TermografiaDocument4 pagesSeccionadores - TermografiaralexmlPas encore d'évaluation
- MOLINODocument2 pagesMOLINOralexmlPas encore d'évaluation
- Monitoreo Por CondicionDocument2 pagesMonitoreo Por CondicionralexmlPas encore d'évaluation
- RCM2 - Amef Dico Planar y Dico LinerDocument95 pagesRCM2 - Amef Dico Planar y Dico LinerralexmlPas encore d'évaluation
- Chancado-Primario TermografiaDocument1 pageChancado-Primario TermografiaralexmlPas encore d'évaluation
- Manual Medidor Vibraciòn Fluke 810 PDFDocument148 pagesManual Medidor Vibraciòn Fluke 810 PDFErika Beltran Ruiz100% (1)
- Reporte Termografia - 30.09.20 - 5740-BM-TR-2002 PDFDocument1 pageReporte Termografia - 30.09.20 - 5740-BM-TR-2002 PDFralexmlPas encore d'évaluation
- Anexo No.02 - Protocolo de Resistividad de Terreno L.T 220 KVDocument2 pagesAnexo No.02 - Protocolo de Resistividad de Terreno L.T 220 KVralexmlPas encore d'évaluation
- Formato de AaDocument1 pageFormato de AaralexmlPas encore d'évaluation
- Anexo No.02 - Protocolo de Resistividad de Terreno L.T 220 KVDocument2 pagesAnexo No.02 - Protocolo de Resistividad de Terreno L.T 220 KVralexmlPas encore d'évaluation
- Anexo 18 A Manual de Mantenimiento para SubestacionesDocument168 pagesAnexo 18 A Manual de Mantenimiento para SubestacionesRoberto Leiva Valladares100% (2)
- Manuel EstandarDocument246 pagesManuel EstandarralexmlPas encore d'évaluation
- Reporte Termografia - 30.09.20 - 5740-BM-TR-2001 PDFDocument1 pageReporte Termografia - 30.09.20 - 5740-BM-TR-2001 PDFralexmlPas encore d'évaluation
- Reporte Termografia - 30.09.20 - 5740-BM-TR-2001 PDFDocument1 pageReporte Termografia - 30.09.20 - 5740-BM-TR-2001 PDFralexmlPas encore d'évaluation
- Reporte Termografia - 30.09.20 - 5740-BM-TR-1001 PDFDocument1 pageReporte Termografia - 30.09.20 - 5740-BM-TR-1001 PDFralexmlPas encore d'évaluation
- Celdas GISDocument1 pageCeldas GISralexmlPas encore d'évaluation
- Inspección Termografica en SETDocument31 pagesInspección Termografica en SETDavid MuchaPas encore d'évaluation
- Diagrama de DecisiónDocument1 pageDiagrama de DecisiónralexmlPas encore d'évaluation
- 0010 - Termografia - SS - Ee. N°04 - Bocamina 1940 - Cut Out - S42 - 2019.10.22Document1 page0010 - Termografia - SS - Ee. N°04 - Bocamina 1940 - Cut Out - S42 - 2019.10.22ralexmlPas encore d'évaluation
- 0010 - Termografia - SS - Ee. N°04 - Bocamina 1940 - Cut Out - S42 - 2019.10.22Document1 page0010 - Termografia - SS - Ee. N°04 - Bocamina 1940 - Cut Out - S42 - 2019.10.22ralexmlPas encore d'évaluation
- Torres Raymundo PDFDocument142 pagesTorres Raymundo PDFralexml100% (1)
- Hierba Del ClavoDocument2 pagesHierba Del ClavoGentil GoyimwitzPas encore d'évaluation
- Ensayo Geologia de ColombiaDocument5 pagesEnsayo Geologia de ColombiaDiana QuintanaPas encore d'évaluation
- Procesos de FosilizaciónDocument6 pagesProcesos de FosilizaciónAnonymous 8n1J4wYPas encore d'évaluation
- Carro Controlado Desde Celular AndroidDocument2 pagesCarro Controlado Desde Celular AndroidFreddyLaimeCoyauriPas encore d'évaluation
- Prueba Excel y AccessDocument4 pagesPrueba Excel y AccessYeimy EspitiaPas encore d'évaluation
- 1 Manual de PetrofisicaDocument81 pages1 Manual de PetrofisicaJenrry HeresPas encore d'évaluation
- Deberes y Derechos 20 de AgostoDocument7 pagesDeberes y Derechos 20 de AgostoNORBAY GOMEZ SOLARTEPas encore d'évaluation
- Sesión #03: Hábitos de Estudio Reto AcadémicoDocument9 pagesSesión #03: Hábitos de Estudio Reto AcadémicoPilar Carbajal AzaldeguiPas encore d'évaluation
- Macroglosia Congenita en Pacientes PediatricosDocument22 pagesMacroglosia Congenita en Pacientes PediatricosChristian OrellanaPas encore d'évaluation
- Informe ChorizoDocument32 pagesInforme ChorizoGabriel TorresPas encore d'évaluation
- Ritmos Cardíacos, Electrocardiograma PDFDocument28 pagesRitmos Cardíacos, Electrocardiograma PDFDiana100% (1)
- Mallas Certus Semipresencial GESDocument1 pageMallas Certus Semipresencial GESDARWWIN MARTIN PUSE BENITESPas encore d'évaluation
- LaboratorioII BD2Preventa Tema1Document9 pagesLaboratorioII BD2Preventa Tema1alexPas encore d'évaluation
- La Ambigüedad Conceptual y Terminología de Los DDDocument15 pagesLa Ambigüedad Conceptual y Terminología de Los DDandrePas encore d'évaluation
- Examen Sesion 8Document52 pagesExamen Sesion 8Angel Alcides Atencio CarhuaricraPas encore d'évaluation
- Expediente Ampliación de Plazo #04Document16 pagesExpediente Ampliación de Plazo #04Jorge Luis CernaPas encore d'évaluation
- Bourdieu, Pierre - Las Formas Del Capital (Poder, Derecho y Clases Sociales)Document19 pagesBourdieu, Pierre - Las Formas Del Capital (Poder, Derecho y Clases Sociales)Jorge Vivas Santisteban100% (1)
- Laboratorio de Temas Selectos de Química I: Centro Universitario Doctor Emilio Cárdenas Preparatoria ContemporáneaDocument55 pagesLaboratorio de Temas Selectos de Química I: Centro Universitario Doctor Emilio Cárdenas Preparatoria ContemporáneaRegina RiosPas encore d'évaluation
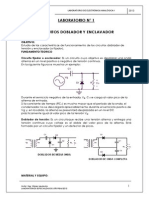
- Lab1-Doblador y EnclavadorDocument3 pagesLab1-Doblador y Enclavadormeeduma67% (3)
- Procedimiento de Investigacion de Incidentes y AccidentesDocument7 pagesProcedimiento de Investigacion de Incidentes y AccidentesSandra Arevalo Garrido100% (1)
- Organigrama Septiembre 14 de 2020Document17 pagesOrganigrama Septiembre 14 de 2020Andrea Hernández MPas encore d'évaluation
- La Psicologia CriminalDocument10 pagesLa Psicologia CriminalMario HerreraPas encore d'évaluation
- Evaluacion Neuropsicologica, Examen Abreviado de Funciones SuperioresDocument13 pagesEvaluacion Neuropsicologica, Examen Abreviado de Funciones Superiorescarlos miguel mendoza mallmaPas encore d'évaluation
- Central Alarma 8 Zonas DSCDocument2 pagesCentral Alarma 8 Zonas DSCLuis Vergara AsenjoPas encore d'évaluation
- Actividad3.1 DiagnosticoDocument6 pagesActividad3.1 DiagnosticoKevin RoblesPas encore d'évaluation
- Febrero Planeacion AdaptaciónDocument52 pagesFebrero Planeacion AdaptaciónNathalyPas encore d'évaluation
- Sistema Financiero MexicanoDocument8 pagesSistema Financiero MexicanocupcakeluxPas encore d'évaluation