Vous aimerez peut-être aussi
- Exploratory Study On The Use of Crushed Cockle Shell As Partial Sand Replacement in ConcreteDocument5 pagesExploratory Study On The Use of Crushed Cockle Shell As Partial Sand Replacement in ConcreteInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- Congenital Malaria: Correlation of Umbilical Cord Plasmodium falciparum Parasitemia with Maternal Peripheral Blood Plasmodium falciparum Parasitemia in selected Hospitals in Jimeta Yola, Adamawa State, NigeriaDocument6 pagesCongenital Malaria: Correlation of Umbilical Cord Plasmodium falciparum Parasitemia with Maternal Peripheral Blood Plasmodium falciparum Parasitemia in selected Hospitals in Jimeta Yola, Adamawa State, NigeriaInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- Review: Nonlinear Techniques For Analysis of Heart Rate VariabilityDocument16 pagesReview: Nonlinear Techniques For Analysis of Heart Rate VariabilityInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- DDOS Attacks-A Stealthy Way of Implementation and DetectionDocument6 pagesDDOS Attacks-A Stealthy Way of Implementation and DetectionInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- The Low-Temperature Radiant Floor Heating System Design and Experimental Study On Its Thermal ComfortDocument6 pagesThe Low-Temperature Radiant Floor Heating System Design and Experimental Study On Its Thermal ComfortInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- Dynamic Modeling For Gas Phase Propylene Copolymerization in A Fluidized Bed ReactorDocument5 pagesDynamic Modeling For Gas Phase Propylene Copolymerization in A Fluidized Bed ReactorInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- Study and Evaluation For Different Types of Sudanese Crude Oil PropertiesDocument4 pagesStudy and Evaluation For Different Types of Sudanese Crude Oil PropertiesInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- An Improved Fading Kalman Filter in The Application of BDS Dynamic PositioningDocument8 pagesAn Improved Fading Kalman Filter in The Application of BDS Dynamic PositioningInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- A Short Report On Different Wavelets and Their StructuresDocument5 pagesA Short Report On Different Wavelets and Their StructuresInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- A Case Study On Academic Services Application Using Agile Methodology For Mobile Cloud ComputingDocument9 pagesA Case Study On Academic Services Application Using Agile Methodology For Mobile Cloud ComputingInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- Positioning Error Analysis and Compensation of Differential Precision WorkbenchDocument5 pagesPositioning Error Analysis and Compensation of Differential Precision WorkbenchInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- Structural Aspect On Carbon Dioxide Capture in NanotubesDocument9 pagesStructural Aspect On Carbon Dioxide Capture in NanotubesInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- Correlation Analysis of Tool Wear and Cutting Sound SignalDocument5 pagesCorrelation Analysis of Tool Wear and Cutting Sound SignalInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- BIM Based Organizational LearningDocument9 pagesBIM Based Organizational LearningInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- Experimental Study On Critical Closing Pressure of Mudstone Fractured ReservoirsDocument5 pagesExperimental Study On Critical Closing Pressure of Mudstone Fractured ReservoirsInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- Reduce Resources For Privacy in Mobile Cloud Computing Using Blowfish and DSA AlgorithmsDocument10 pagesReduce Resources For Privacy in Mobile Cloud Computing Using Blowfish and DSA AlgorithmsInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- Synergistic Effect of Halide Ions On The Corrosion Inhibition of Mild Steel in Sulphuric Acid Using Alkyl Substituted Piperidi-4 - One ThiosemicarbazonesDocument8 pagesSynergistic Effect of Halide Ions On The Corrosion Inhibition of Mild Steel in Sulphuric Acid Using Alkyl Substituted Piperidi-4 - One ThiosemicarbazonesInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- A Novel High-Precision Curvature-Compensated CMOS Bandgap Reference Without Using An Op-AmpDocument6 pagesA Novel High-Precision Curvature-Compensated CMOS Bandgap Reference Without Using An Op-AmpInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- Thesummaryabout Fuzzy Control Parameters Selected Based On Brake Driver Intention RecognitionDocument6 pagesThesummaryabout Fuzzy Control Parameters Selected Based On Brake Driver Intention RecognitionInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- Resistance of Dryland Rice To Stem Borer (Scirpophaga Incertulas WLK.) Using Organic FertilizerDocument4 pagesResistance of Dryland Rice To Stem Borer (Scirpophaga Incertulas WLK.) Using Organic FertilizerInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- An Understanding of The Electronic Bipolar Resistance Switching Behavior in Cu/TiO2/ITO StructureDocument4 pagesAn Understanding of The Electronic Bipolar Resistance Switching Behavior in Cu/TiO2/ITO StructureInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- Design of The Floating-Type Memristor Emulator and Its Circuit ImplementationDocument7 pagesDesign of The Floating-Type Memristor Emulator and Its Circuit ImplementationInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- A Fast and Effective Impulse Noise FilterDocument6 pagesA Fast and Effective Impulse Noise FilterInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- Performance Measurement of Digital Modulation Schemes Using FPGADocument6 pagesPerformance Measurement of Digital Modulation Schemes Using FPGAInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- I Extension of Some Common Fixed Point Theorems Using Compatible Mappings in Fuzzy Metric SpaceDocument3 pagesI Extension of Some Common Fixed Point Theorems Using Compatible Mappings in Fuzzy Metric SpaceInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- Performance Analysis of Massive MIMO Downlink System With Imperfect Channel State InformationDocument6 pagesPerformance Analysis of Massive MIMO Downlink System With Imperfect Channel State InformationInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- A Mathematical Programming Approach For Selection of Variables in Cluster AnalysisDocument9 pagesA Mathematical Programming Approach For Selection of Variables in Cluster AnalysisInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- The Simulation Research of The Reamer of The Cutter Suction Dredger Based On ADAMSDocument7 pagesThe Simulation Research of The Reamer of The Cutter Suction Dredger Based On ADAMSInternational Journal of Research in Engineering and SciencePas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- SeparationDocument3 pagesSeparationeladeb eladebPas encore d'évaluation
- The Chemical Accidents (Emergency Planning, Preparedness and Response) Rules, 1996Document44 pagesThe Chemical Accidents (Emergency Planning, Preparedness and Response) Rules, 1996erbhaveshparmarPas encore d'évaluation
- Bechem Premium GreaseDocument2 pagesBechem Premium GreaseDinesh babuPas encore d'évaluation
- Sewage and Waste WaterDocument4 pagesSewage and Waste WaterMuhammad DzikrulPas encore d'évaluation
- Model Question Paper: Fifth Semester B.E. Degree ExaminationDocument3 pagesModel Question Paper: Fifth Semester B.E. Degree ExaminationPCT 19AE04 Sivakumar. KPas encore d'évaluation
- Aroclor 1232Document48 pagesAroclor 1232mcreadmailPas encore d'évaluation
- Lecture 2 - Pavement Materials and Pavement StructureDocument5 pagesLecture 2 - Pavement Materials and Pavement StructureHarshvardhan SiddharthPas encore d'évaluation
- Honda Pump BrochureDocument18 pagesHonda Pump Brochurefser04Pas encore d'évaluation
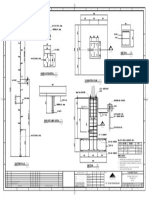
- Bsi Eof DWG Cs 150 (0) - Lighting Pole 10m HeightDocument1 pageBsi Eof DWG Cs 150 (0) - Lighting Pole 10m HeightdharuPas encore d'évaluation
- Thesis FulltextDocument472 pagesThesis FulltextBhaskar ReddyPas encore d'évaluation
- Install HDPE Pipelines Safely and EffectivelyDocument20 pagesInstall HDPE Pipelines Safely and EffectivelyAvaan IvaanPas encore d'évaluation
- Influence of Lead Zinc Iron III and ChroDocument7 pagesInfluence of Lead Zinc Iron III and ChroFrancisco GarayoPas encore d'évaluation
- 1-Classification of Monomers and PolyreactionsDocument19 pages1-Classification of Monomers and PolyreactionsMohanraj ShanmugamPas encore d'évaluation
- Chem 17 - LE 1 (2nd Sem)Document3 pagesChem 17 - LE 1 (2nd Sem)Aleli ReyesPas encore d'évaluation
- MADE EASY ONLINE TEST SERIES SOLUTIONSDocument26 pagesMADE EASY ONLINE TEST SERIES SOLUTIONSvenkateshPas encore d'évaluation
- Physical and Chemical Changes Lab ReportDocument5 pagesPhysical and Chemical Changes Lab ReportWilliam CarrierePas encore d'évaluation
- Midterm Exam Form 4 INTESCI COMPLETEDocument10 pagesMidterm Exam Form 4 INTESCI COMPLETECHRISTOPHER SCALEPas encore d'évaluation
- Final ReviewDocument43 pagesFinal ReviewKaththi KathirPas encore d'évaluation
- G9 Q2 W2 Ionic or Covalent CompoundsDocument17 pagesG9 Q2 W2 Ionic or Covalent CompoundsCherrilyn Enverzo33% (3)
- Stewart Approach RS Charitas PalembangDocument38 pagesStewart Approach RS Charitas PalembangtyasPas encore d'évaluation
- Stage 2 BOQDocument19 pagesStage 2 BOQFadi DeebPas encore d'évaluation
- Testing Effects of Acid Rain On StatuesDocument5 pagesTesting Effects of Acid Rain On StatuesDanielle LonePas encore d'évaluation
- Design and Vibration Analysis of A 2U-Cubesat Structure Using Aa-6061 For Aunsat - IiDocument8 pagesDesign and Vibration Analysis of A 2U-Cubesat Structure Using Aa-6061 For Aunsat - Iiபொன்னியின் செல்வன்Pas encore d'évaluation
- July 2017: Understanding The Basics of Hand Taps and Carbide TapsDocument24 pagesJuly 2017: Understanding The Basics of Hand Taps and Carbide TapswinasharPas encore d'évaluation
- Criteria For Switching Products To Certified Compostable PlasticsDocument2 pagesCriteria For Switching Products To Certified Compostable PlasticsDonato GalloPas encore d'évaluation
- Physics 10 - SLIP TESTDocument2 pagesPhysics 10 - SLIP TESTrehanrehan2190Pas encore d'évaluation
- Handbook To BS5628-2Document280 pagesHandbook To BS5628-2Ashwin B S Rao80% (5)
- Value Addition ( (Technology) + (Innovation) ) X Quality: Garment FinishDocument66 pagesValue Addition ( (Technology) + (Innovation) ) X Quality: Garment FinishSivakumar K100% (3)
- Iso 6157-3-1988Document16 pagesIso 6157-3-1988Queen100% (1)
- Introduction to the Three Types of Heat Transfer: Conduction, Convection, and RadiationDocument6 pagesIntroduction to the Three Types of Heat Transfer: Conduction, Convection, and Radiationseraj ibramemPas encore d'évaluation