Vous aimerez peut-être aussi
- Descriptive Book On Eassy For SyDocument109 pagesDescriptive Book On Eassy For SynagasaiPas encore d'évaluation
- High Level PuzzlesDocument168 pagesHigh Level Puzzlesshubham309Pas encore d'évaluation
- WebsitesDocument4 pagesWebsitesshubham309Pas encore d'évaluation
- Insurance Awareness Questions by AffairsCloudDocument20 pagesInsurance Awareness Questions by AffairsCloudvinodPas encore d'évaluation
- BankingDocument3 pagesBankingshubham309Pas encore d'évaluation
- Seating Arrangement by ArihantDocument16 pagesSeating Arrangement by Arihantsukanyas111100% (2)
- List of CompaniesDocument43 pagesList of Companiesshubham309Pas encore d'évaluation
- CdmaDocument37 pagesCdmashubham309Pas encore d'évaluation
- GPS Final ReportDocument24 pagesGPS Final Reportapi-371119893% (14)
- Interfacing of Temperature Sensor LM 35Document9 pagesInterfacing of Temperature Sensor LM 35shubham309Pas encore d'évaluation
- Sensor: Shubham Mundada T.Y.B.TECH, ETC (A) ROLL NO:T3438Document75 pagesSensor: Shubham Mundada T.Y.B.TECH, ETC (A) ROLL NO:T3438shubham309Pas encore d'évaluation
- Linux Operating SystemDocument6 pagesLinux Operating Systemshubham309100% (1)
- 4GDocument18 pages4Gshubham309Pas encore d'évaluation
- Amoled DisplayDocument19 pagesAmoled Displayshubham309Pas encore d'évaluation
- 4GDocument18 pages4Gshubham309Pas encore d'évaluation
- Amoled DisplayDocument19 pagesAmoled Displayshubham309Pas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Compressor-Less: Historical ApplicationsDocument70 pagesCompressor-Less: Historical Applicationssuryakantshrotriya100% (1)
- Shear and Diagonal Tension in BeamDocument16 pagesShear and Diagonal Tension in BeamMouy PhonThornPas encore d'évaluation
- Lubricants - McMaster-CarrDocument8 pagesLubricants - McMaster-CarrjeanyoperPas encore d'évaluation
- Union Metal SemiconductorDocument4 pagesUnion Metal SemiconductorskinhugoPas encore d'évaluation
- Relations Between Lean Management and Organizational StructuresDocument12 pagesRelations Between Lean Management and Organizational StructuresRENE JAVIER PACHECO SALASPas encore d'évaluation
- Accommodating Expansion of Brickwork: Technical Notes 18ADocument13 pagesAccommodating Expansion of Brickwork: Technical Notes 18AWissam AlameddinePas encore d'évaluation
- Makaut Grade Card Collection Notice 2018-19Document1 pageMakaut Grade Card Collection Notice 2018-19Sourav PandaPas encore d'évaluation
- Power Distribution & Utilization: Total Power Generation of Last 10 Years and Forecast of 20 YearsDocument12 pagesPower Distribution & Utilization: Total Power Generation of Last 10 Years and Forecast of 20 YearsSYED ALIYYAN IMRAN ALIPas encore d'évaluation
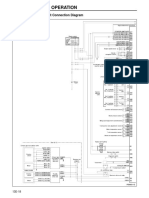
- Structure and Operation: 3. Electronic Control Unit Connection DiagramDocument16 pagesStructure and Operation: 3. Electronic Control Unit Connection DiagramAung Hlaing Min MyanmarPas encore d'évaluation
- Chapter 1 MPLS OAM Configuration Commands ...................................................................... 1-1Document27 pagesChapter 1 MPLS OAM Configuration Commands ...................................................................... 1-1Randy DookheranPas encore d'évaluation
- IMG - 0009 Thermodynamic Lecture MRCDocument1 pageIMG - 0009 Thermodynamic Lecture MRCBugoy2023Pas encore d'évaluation
- The Extension Delivery SystemDocument10 pagesThe Extension Delivery SystemApril Jay Abacial IIPas encore d'évaluation
- Rexroth Hd2 ControlairDocument15 pagesRexroth Hd2 ControlairRafaelPas encore d'évaluation
- Ideal Vs Real OttoDocument5 pagesIdeal Vs Real Ottoa7med SoulimanPas encore d'évaluation
- Sem06 Gca InsoDocument2 pagesSem06 Gca InsoBogdan PistolPas encore d'évaluation
- Results 2020: Climate Change Performance IndexDocument32 pagesResults 2020: Climate Change Performance IndexTonyPas encore d'évaluation
- Evolution of Media INDUSTRIAL ERADocument16 pagesEvolution of Media INDUSTRIAL ERAAlec Ruht MasulaPas encore d'évaluation
- Generic StructureDocument6 pagesGeneric StructureAndre AlvarezPas encore d'évaluation
- 141 ISACA NACACS Auditing IT Projects Audit ProgramDocument86 pages141 ISACA NACACS Auditing IT Projects Audit Programkautaliya100% (6)
- Philosophical Thoughts On EducationDocument30 pagesPhilosophical Thoughts On EducationCharyl Louise MonderondoPas encore d'évaluation
- Palmiye Leaflet 2015 enDocument4 pagesPalmiye Leaflet 2015 ensaraju_felixPas encore d'évaluation
- Sheet Metal Cutting Using Geneva MechanismDocument27 pagesSheet Metal Cutting Using Geneva MechanismsingamPas encore d'évaluation
- Solved Consider Again The Demand Function For Corn in Formula 1Document1 pageSolved Consider Again The Demand Function For Corn in Formula 1M Bilal SaleemPas encore d'évaluation
- PUP 200 Quizzes 6Document47 pagesPUP 200 Quizzes 6Nam TranPas encore d'évaluation
- Week 8: Spread-Spectrum Modulation - Direct Sequence Spread SpectrumDocument79 pagesWeek 8: Spread-Spectrum Modulation - Direct Sequence Spread SpectrumAmir MustakimPas encore d'évaluation
- NCR Supplier PPAP Training PresentationDocument166 pagesNCR Supplier PPAP Training PresentationRajeev ChadhaPas encore d'évaluation
- BM Stake Holders Case Study 1st November 2023Document2 pagesBM Stake Holders Case Study 1st November 2023Arsath malik ArsathPas encore d'évaluation
- Alderamin On The Sky - Volume 7Document311 pagesAlderamin On The Sky - Volume 7Pedro SilvaPas encore d'évaluation
- Final FirstpartDocument11 pagesFinal FirstpartLance Johnpaul SyPas encore d'évaluation
- Ground Architecture (Mourad Medhat)Document146 pagesGround Architecture (Mourad Medhat)Aída SousaPas encore d'évaluation