Académique Documents
Professionnel Documents
Culture Documents
1994 Telecontrol Redes
Transféré par
Mikami TeruCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
1994 Telecontrol Redes
Transféré par
Mikami TeruDroits d'auteur :
Formats disponibles
Jos Ignacio Escudero Fombuena
Joaqun Luque Rodrguez
TELECONTROL DE
REDES ELCTRICAS
UNIVERSIDAD DE SEVILLA
DEPARTAMENTO DE TECNOLOGA ELECTRNICA
Jos Ignacio Escudero Fombuena
Joaqun Luque Rodrguez
TELECONTROL DE
REDES ELCTRICAS
Universidad de Sevilla
Departamento de Tecnologa Electrnica
Servicio de Publicaciones
Sevilla, 1994
! Facultad de Informtica y Estadstica
Avenida Reina Mercedes s/n
41012-Sevilla. SPAIN.
" 455 27 86
TELECONTROL DE REDES ELCTRICAS
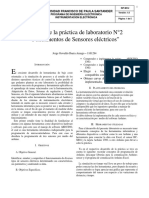
1.- INTRODUCCIN
Una red o un sistema elctrico se compone bsicamente de
dos elementos: por un lado tendremos plantas generadoras de
energa elctrica1 y por otro a los consumidores de esa energa.
La conexin entre esas dos partes se efecta mediante una red
de
transmisin
que,
por
razones
tcnico-econmicas,
se
configura en una estructura jerrquica con varios niveles de
tensin de transporte, reparto y distribucin (como puede verse
en Fig. 1). El paso de un nivel de tensin a otro se efecta en
centros
tanto
de
denominados
los
subestaciones
propios
transformadoras,
transformadores,
como
de
dotados,
los
sistemas
necesarios de proteccin y maniobra.
El
transporte
distribucin
de
esa
energa
elctrica
desde los puntos de generacin hasta los de consumo, se basa en
un
conjunto
de
tcnicas
en
constante
evolucin
desde
los
comienzos de esta actividad hasta nuestros das. Las lneas o
caminos nicos han ido dejando paso a una situacin en la que
se garantiza al consumidor el suministro de energa a travs de
diversas
rutas
alternativas,
multienlazadas
entre
s,
hasta
constituir una urdimbre que es la red elctrica.
Nucleares, trmicas de carbn o fuel-oil, hidrulicas, elicas etc.
TELECONTROL DE REDES ELCTRICAS
Fig. 1 : Estructura de la red elctrica.
Adems, la penetracin en las costumbre sociales del uso
de la electricidad2 hace recaer mayor responsabilidad sobre las
compaas
suministradoras,
que
debern
garantizar
la
continuidad del servicio para el normal desenvolvimiento de
una
sociedad
2
moderna.
Todo
ello
provoca
una
creciente
Si se observa la tendencia de consumo elctrico a lo largo de los aos
se
pueden
observar
incrementos
importantes
coincidiendo
con
la
popularizacin
de
algunos
electrodomesticos.
As
ocurri
con
la
generalizacin del uso del frigorfico, posteriormente con la lavadora y hoy
en da con la instalacin de aire acondicionado.
TELECONTROL DE REDES ELCTRICAS
complejidad en la planificacin, gestin y explotacin de una
red elctrica, para lo cual se trata de encontrar tcnicas que
ayuden a la resolucin de dichas tareas, una de las cuales es
sin duda la automatizacin en el control de la red.
Pero la mejora en la calidad y seguridad del servicio no
es el nico argumento que nos lleva a dicha automatizacin. Por
ejemplo, el carcter geogrficamente disperso de la red, con
gran nmero de subestaciones y centrales, obliga a mantener en
cada uno de estos
enclaves un equipo de tcnicos a turnos
ocupados en tareas de vigilancia y preparados para actuar en
caso de necesidad. Es fcil comprender que la automatizacin de
dichas funciones podra justificarse, en muchos casos, desde
una perspectiva exclusivamente econmica.
Por tanto la extensin y complejidad de operacin de las
redes de servicios, y en particular de las redes elctricas, ha
llevado a la generalizacin de los sistemas de control que
automatizan
en
cierta
medida
su
explotacin,
siendo
stos
concebidos como elementos que mejoran la calidad del servicio
disminuyendo los costes.
Aparte de las consideraciones previas hay que tener en
cuenta tambin que la automatizacin de las redes ha sido algo
buscado desde sus comienzos. Ya en 1890 existen patentes para
control remoto y entre los aos 1920 y 1940 se desarrollan
varios sistemas comerciales en este rea. Sin embargo, es en la
dcada de los sesenta, con el advenimiento del minicomputador,
TELECONTROL DE REDES ELCTRICAS
cuando los sistemas de control de redes sufren una evolucin
vertiginosa, apuntando ya las caractersticas de los actuales
centros de control.
En
lneas
generales
un
diremos
sistema
est
de
formado
que
control
por
un
centro de control, o un
conjunto de centros de
control
jerarquizados
[CHIH-90],
un
conjunto de unidades de
transmisin
remotas
RTU3
conectadas
al
centro
de
En
control.
Fig. 2 :Posible estructura de un sistema de
control.
la Fig. 2 se puede ver una posible estructura de un sistema de
control. De esta manera es posible un trasvase de informacin
entre cada remota y el centro de control y viceversa. En este
documento veremos la estructura de las redes elctricas as
como sus componentes y el modo de funcionamiento de los mismos.
Del ingls: RTU = Remote Terminal Unit
TELECONTROL DE REDES ELCTRICAS
2.-SISTEMAS DE CONTROL
La palabra control es un trmino genrico que en algunas
ocasiones puede llevar a confusin. Por ello es interesante
dejar claro, que para nosotros, este trmino implica no slo el
concepto de actuacin sino que, tambin, le aade la idea de
monitorizacin o presentacin de datos en el centro de control
del sistema, lo que implica la adquisicin de datos del campo
por las estaciones remotas.
En
sus
sistemas
de
primeros
aos
las
misiones
control
eran
bastantes
encomendadas
simples
as
los
como
los
componentes y las tcnicas empleadas. Haba muy poca eleccin
en los tipos de componentes disponibles: todos eran de tipo
electro-
mecnico.
componentes
de
convertidores
Los
estado
analgico-
sistemas
slido,
de
control
sensores
digitales.
empleaban
electrnicos
Incluso
las
estaciones
remotas, dentro de una primera evolucin de los sistemas de
control, continuaban estructuradas como en sus comienzos ya que
las
empresas
implicadas
en
las
mismas
no
buscaban
una
alternativa a la prestacin de funciones de las mismas. Sin
embargo,
en
los
aos
ochenta
se
empiezan
aplicar
nuevas
tcnicas de diseo de estaciones remotas de manera que nos
encontramos
aumentado
remotas
que
usan
considerablemente
las
microprocesadores,
prestaciones
que
lo
que
ofrece
ha
una
remota, y ha abierto un vasto campo de posibilidades para el
futuro.
TELECONTROL DE REDES ELCTRICAS
Los sistemas de control, que comprenden instalaciones de
telemedidas,
poseen
cada
aplicaciones
distintas
vez
de
las
ms
una
iniciales,
mayor
sobre
cantidad
todo
en
de
el
sector elctrico. Aquello que en sus comienzos empez siendo un
sistema de supervisin, control y adquisicin de datos, sistema
SCADA4, se ha ido convirtiendo con el tiempo en sistema de
administracin de energa EMS5 [KIM -90], [WAHA-92]. Por ello
el sistema de control se convierte, hoy en da, en un sistema
de
supervisin
control:
sobre
con
un
generacin,
reas
amplio
transmisin
geogrficas
muy
abanico
y
de
aplicaciones
distribucin
grandes,
de
adquiriendo
de
energa
datos
del
campo y suministrando informacin a los centros de control y
operacin. Todo esto le va a permitir llevar a cabo muchas
tareas de manera automatizada, algunas de las cuales son: el
despacho de energa, la resolucin de problemas producidos por
restricciones de carga o "cadas" de tensin, el clculo de las
previsiones de demanda de la red, etc.
Por todo lo que hemos visto ms arriba es por lo que las
normas
ANSI
C37.1
[ANSI-87]
definen
el
sistema
de
administracin de energa, denominado genricamente sistema de
supervisin,
como
el
conjunto
de
elementos
de
control,
indicadores y equipos de telemedidas asociados a la estacin
principal6, as como todos los dispositivos complementarios que
4
5
6
Del ingls: SCADA = Supervisory Control And Data Acquisition.
Tambin del ingls: EMS = Energy Management System.
Centro de control.
TELECONTROL DE REDES ELCTRICAS
se encuentren tanto en las subestaciones como en las propias
remotas.
Fig. 3 : Configuracin tpica de un sistema de control.
La
estructura
de
un
sistema
de
control
puede
estar
gobernada por un conjunto de centros de control jerarquizados o
en
paralelo
que
comparten
informacin
se
trasvasa
entre
ellos. Por ello en los siguientes apartados consideraremos los
componentes bsicos de un sistema de control (Fig. 3) que son :
centro de control, unidad de transmisin remota RTU y medio de
comunicacin
entre
ellos,
desarrollando
su
estructura,
componentes y sus caractersticas de funcionamiento.
sus
TELECONTROL DE REDES ELCTRICAS
2.1.- CENTRO DE CONTROL
Los sistemas de
control
de
redes
elctricas
tienen
la
misin de ejercer el control sobre determinados dispositivos y
confirmar que este control se produce de forma adecuada. Al
conjunto de dispositivos, mdulos funcionales e interfaces con
los
canales
de
comunicacin
que
permitan
llevar
cabo
correctamente las funciones de supervisin se le da el nombre
de centro de control [ANSI-87].
En esta definicin el concepto "control" implica todo tipo
de control, asociando los equipos de telemedida al centro de
control as como cualquier dispositivo complementario que en la
remota exista. En sus comienzos los centros de control slo
llevaban a cabo las funciones SCADA, que veremos ms adelante.
Con el tiempo se le fueron aadiendo otras funciones diferentes
hasta conseguir lo que hemos llamado un sistema de gestin de
energa EMS. Para llevar a cabo todas estas tareas, el centro
de control en particular, y el sistema de control en general,
debe
estar
diseado
bajo
las
premisas
de
fiabilidad,
estabilidad y seguridad, economa.
La consecucin de estas tres premisas fue un gran paso
hacia adelante en la ampliacin de las posibilidades de uso de
los centros de control. De las tres la ms significativa es la
de seguridad y por ello vamos a ver ms en profundidad lo que
esto implica. Las condiciones de operacin de un sistema se
puede dividir en tres categoras o estados diferentes: estado
TELECONTROL DE REDES ELCTRICAS
normal, estado de emergencia y estado de restauracin [DYLI77].
El primero de ellos, el estado normal, ocurre cuando los
lmites de operacin y carga son satisfechos por el sistema. Es
razonable y deseable suponer que ste sea el estado en el que
generalmente se encuentre el sistema cuando se encuentra en un
estado de cuasi-equilibrio.
Un sistema est en estado de emergencia cuando los lmites
de operacin no se satisfacen completamente. Existen dos tipos
de emergencias: a) Cuando se violan nicamente los lmites de
operacin en el estado de cuasi-equilibrio, por ejemplo, cuando
los lmites de carga de un equipo se sobrepasan o la tensin en
una lnea es inferior a lo previsto. b) Cuando se violan los
lmites de operacin en estabilidad y como resultado de ello
peligra la estabilidad del sistema. El primero de ellos recibe
el nombre de "emergencia de estado de equilibrio" mientras que
el segundo se conoce como "emergencia dinmica".
El estado de restauracin ocurre cuando en el sistema no
se satisfacen los lmites de carga y como consecuencia de ello
el sistema completo o una parte de l se "cae". En caso de que
sea una parte del sistema la que se "caiga" el resto puede
encontrarse
en
estado
de
emergencia.
Naturalmente
en
estos
casos la actuacin del centro de control debe ser inmediata ya
que se pueden suceder en cascada las "cadas" de otras partes
del sistema deteriorndolo an ms.
TELECONTROL DE REDES ELCTRICAS
Al
dividir
el
estado
10
de
operacin
de
un
sistema
de
potencia en tres estados posibles, estamos subdividiendo a su
vez el problema general de funcionamiento en tres subproblemas,
de los cuales el ms significativo, desde el punto de vista del
diseo y utilizacin del centro de control, ser el relativo al
funcionamiento y operacin del sistema cuando ste se encuentre
en el estado normal, estado en el que debe de encontrarse la
mayor parte del tiempo. Por tanto la misin del centro de
control consistir en mantener al sistema en el estado normal
de operacin, previniendo o minimizando el paso a otro estado
diferente no deseado. Para realizar una estrategia efectiva que
nos permita llevar a cabo este objetivo vamos a desarrollar ms
detenidamente el concepto de seguridad del sistema.
La seguridad de un sistema se puede considerar como la
capacidad
que
tiene
ese
sistema
de
enfrentarse
una
perturbacin del mismo sin pasar a un estado de emergencia. Si
eso ocurre diremos que el sistema es seguro. Para ello el
propio
sistema
posee
un
conjunto
de
posibles
contingencias
clasificadas en seguras e inseguras, de manera que el sistema
de control, para conseguir su propsito de prevenir o minimizar
el
paso
del
estado
normal
cualquier
otro
estado
de
emergencia, debera ser capaz de saber si se encuentra o no en
el
estado
normal.
Si
ste
es
el
caso
determinar
si
la
contingencia que se presenta es segura o insegura y si es
insegura ser capaz de determinar qu acciones son necesarias
realizar para volver a un estado normal seguro.
TELECONTROL DE REDES ELCTRICAS
Todo
esto
ha
llevado
11
integrar
el
control
de
la
generacin y el control de la transmisin, antes dispersas, en
un nico sistema. Para sistemas de control geogrficamente poco
dispersos esta integracin se lleva a cabo con un nico centro
de control. Para sistemas ms grandes es necesario llevar a
cabo esta integracin mediante el uso de varios niveles de
centros de control en una jerarqua de ordenadores.
2.1.1.- FUNCIONES DE UN CENTRO DE CONTROL
Teniendo en cuenta las ideas anteriores, tendremos que
llegar al uso de dispositivos y tcnicas avanzadas ya que la
integracin en un mismo centro de las posibilidades de un SCADA
con muchas de las nuevas tareas, implica la recoleccin, manejo
y procesado, en pocos segundos, de un gran volumen de datos del
sistema en tiempo real [FERR-90]. Estas nuevas posibilidades
traen consigo el uso de tcnicas de filtrado y de estimacin de
estados, as como la integracin en un nico proceso de las
funciones automticas y manuales, tendremos que llegar al uso
de dispositivos y tcnicas avanzadas.
En la Tab. 1 mostramos un resumen de las funciones, en
tiempo real, que pueden aparecer implementadas en los centros
de control. Es difcil encontrar un centro de control que posea
todas estas funciones ya que los problemas de operacin son
muy diferentes de unas redes elctricas a otras, puesto que
TELECONTROL DE REDES ELCTRICAS
dependen
de
los
recursos,
la
12
estructura
la
filosofa
de
operacin de cada compaa elctrica.
Tab. 1 : Funciones de un centro de control.
1.2.3.4.5.6.7.8.9.10.11.-
En
SCADA
Control automtico de la generacin (AGC)
Despacho econmico
Control automtico de la tensin
Control de energa reactiva
Estimacin de estado
Flujo de carga
Anlisis de seguridad
Anlisis automtico de incidencias
Control de emergencias
Reposicin automtica de servicio
la
presentar
Tab.
estos
vemos
centros
otras
de
caractersticas
control
que
se
que
pueden
refieren
dispositivos y aparatos con que pueden contar estos centros
para desarrollar las tareas encomendadas. La mayora de los
centros de control implementan algunas de estas posibilidades y
con el tiempo se le van aadiendo otras distintas que mejoran
los
servicios
tambin
que
ofrece
apuntaremos
que
un
centro
siempre
de
hay
control.
diferencia
Por
ltimo
entre
el
proyecto, sobre el papel, y su implementacin en tiempo-real
del centro de control. En los prximos apartados veremos con
mucho ms detalle algunas de las funciones que realiza o puede
realizar un centro de control.
TELECONTROL DE REDES ELCTRICAS
Tab. 2 :
13
Caractersticas avanzadas de un centro de control.
1.- Estructura jerrquica, consistente en varios niveles del
subsistema de ordenador
2.- Procesador o multiprocesador doble con perifricos redundantes
3.- Equipos de telemedidas y adquisicin de datos de alta velocidad
digitales
4.- Amplios sistemas de instrumentacin de magnitudes elctricas
5.- Monitores en color con grficos interactivos
6.- Cuadro sinptico de pared, dinmico
2.1.1.1.-
SCADA
Segn Luque y otros [LUQU-88] las funciones bsicas de un
sistema SCADA son cuatro: adquisicin y proceso de datos de la
red, dilogo hombre-mquina, archivo histrico de informes, y
gestin de la base de datos asociada a la red.
a) La adquisicin de datos de la red se suele realizar
mediante un mecanismo de pregunta-respuesta, es decir, que es
el centro de control quien solicita de cada RTU los datos que
necesita. Mediante priorizaciones adecuadas se logra que la
informacin
sea
recogida
con
el
retraso
la
periodicidad
elegida.
El proceso de una entrada analgica incluye la conversin
a
valores
rebase
de
de
ingeniera,
lmites
de
el
escalado,
alarma,
el
la
contrastacin
archivo
histrico,
de
la
actualizacin de la base de datos y, eventualmente, el disparo
de los mecanismos de alarma, con registro de la incidencia y
aviso visual y acstico al operador. Por el contrario, en una
TELECONTROL DE REDES ELCTRICAS
14
entrada digital, se comprueba si supone un cambio con respecto
al valor anterior y, en caso afirmativo, se procesa como una
alarma siguiendo un esquema similar al expuesto anteriormente.
Algunos datos se pueden definir "manualmente" si el operador
conoce su valor correcto por otro camino y el valor presente es
errneo debido a una avera conocida.
b) El dilogo hombre-mquina (MMI7) persigue una relacin
cmoda
controla.
fiable
Para
entre
ello
el
el
operador
sistema
SCADA
el
sistema
posee
la
que
ste
funcin
de
monitorizacin del sistema la cual identifica y presenta las
condiciones de operacin que en este instante posee el sistema
de potencia, por ello se trata de una funcin en tiempo real.
El diseo de interfaces amigables es siempre interesante, sobre
todo si se trata de operar sistemas con funcionamiento continuo
que implican la toma de decisiones comprometidas, muy a menudo,
en situaciones de estrs psicolgico.
El
dilogo
hombre-mquina
ha
evolucionado
desde
los
primeros SCADA basados en relaciones alfanumricas de eventos,
hasta los actuales centros con sistemas grficos de manejo de
la
informacin.
Para
mostrar
el
estado
actual
en
que
se
encuentra el sistema esta funcin utiliza los CRT8 con un gran
nmero de formatos de pantallas. En algunas ocasiones y si el
centro de control es importante, se utiliza un "mmico", el
7
8
Del ingls : MMI = Man-Machine Interface
Del ingls: CRT = Cathode Ray Tube
TELECONTROL DE REDES ELCTRICAS
15
cual muestra sobre un esquema general de la red, que ocupa toda
una
pared
del
centro
de
control,
la
topologa
actual
del
sistema.
Un MMI tpico posee estas dos funciones: aquellas basadas
en grficos9, sobre los que se representa la informacin y se
espera la interaccin del operador; y por otra parte aquellos
de
tipo
alfanumrico,
que
contienen
listas
de
estados
medidas, alarmas, histricos, etc. Todo ello realzado por un
cdigo de colores que facilite la comprensin al operador. En
cuanto a las peticiones del operador tambin han evolucionado
desde
el
teclado,
directa
dilogo
hasta
en
mediante
el
uso
pantalla,
de
cdigos
introducidos
desde
teclados
funcionales,
marcacin
dilogos
asistidos
por
el
el
sistema
algunos otros tipos de interfaces avanzados.
c) En muchas ocasiones se plantea la necesidad de contar
con un archivo histrico de la evolucin del sistema del que
sea posible obtener los informes pertinentes. Debido al volumen
de informacin que supondra, no se archiva toda la informacin
obtenida de la red, sino aquella que resulte ms significativa,
como: cambios de estado, rebase de lmites, alarmas, valores
medios, mnimos y mximos, as como una "fotografa" de la red
con
periodicidad
podran
9
10
solicitar
media10,
los
etc.
partes
De
toda
deseados
esta
de
Principalmente diagramas unifilares de la red.
Generalmente del orden de los 10 minutos.
informacin
acuerdo
con
se
las
TELECONTROL DE REDES ELCTRICAS
16
opciones y formatos previstos.
d) Por ltimo la base de datos que se obtiene a partir de
una red elctrica contiene un elevado nmero de elementos. Por
tanto
la
introduccin
el
mantenimiento
de
los
datos
necesarios en un sistema de esas caractersticas hace el manejo
de esa base de datos algo complejo y nada trivial, sobre todo
si se requiere respuestas en tiempo real.
La relacin entre la base de datos y los ficheros de
representacin de datos es crucial. La forma en que esos datos,
que
se
van
calculados,
mostrar
dispuestos
funcionamiento
correcto
en
los
CRT,
han
sido
mostrados
son
la
de
un
sistema
SCADA
en
obtenidos,
base
del
tiempo
real
[AMEL-91].
2.1.1.2.-
CONTROL AUTOMTICO DE LA GENERACIN
La funcin que debe llevar a cabo el control automtico de
la generacin AGC11 es determinar qu cantidad de energa hay
que generar para cubrir satisfactoriamente la demanda actual de
carga, repartiendo esta generacin entre las distintas unidades
de produccin, coordinando los requisitos de regulacin con los
puntos
bsicos
de
operacin
de
cada
unidad
[JALE-92].
Este
ltimo requisito implica importantes conexiones del AGC con
otras funciones propias del centro de control en las cuales se
11
Del ingls : AGC = Automatic Generation Control.
TELECONTROL DE REDES ELCTRICAS
calculan
esos
puntos
bsicos
17
de
operacin
de
las
unidades.
Tradicionalmente esos puntos bsicos los calcula la funcin de
despacho
funciones,
econmico,
como
emergencias,
el
aunque
anlisis
pueden
en
de
algunas
ocasiones
seguridad
establecer
esos
el
puntos
otras
control
bsicos
de
de
operacin.
Al control automtico de generacin se le asigna [IEEE-70]
la responsabilidad de ajustar la produccin de los generadores
con los objetivos generales del sistema de: a) mantener la
frecuencia
en
un
valor
prefijado
b)
mantener,
en
cada
instante, un intercambio neto de potencia, con las compaas
elctricas vecinas, que se encuentre dentro de los contratos
establecidos. Por tanto el AGC es un compendio de equipos y
programas
de
realimentacin
ordenador
que
que
controlan
implementan
tanto
la
ciclos
cerrados
frecuencia
como
con
los
intercambios.
El objetivo del AGC se
puede ver en la Fig. 4, en
ella
representamos
subsistema
S,
que
al
es
un
miembro ms de un sistema
formado
por
varios
subsistemas
interconectados
entre s, que est obligado
Fig. 4 : AGC del rea de control S.
a mantener intercambios de
TELECONTROL DE REDES ELCTRICAS
18
potencia con los subsistemas vecinos. Estos intercambios han
sido representados por PA, PB y PC respectivamente. Como las
lneas de intercambio entre distintos subsistemas pueden ser
muy diversas la misin del AGC del subsistema S consiste en
ajustar su propia produccin de energa de manera que mantenga
constante el flujo de intercambio de potencia con sus vecinos a
la vez que mantiene tambin constante el valor prefijado de la
frecuencia. Naturalmente cada subsistema interconectado posee
requisitos similares de control de la generacin de potencia. A
los
subsistemas
encerrados
por
una
lnea
frontera
de
intercambio se les da el nombre de rea de control.
Si estas reas de control no dispusieran del AGC cualquier
cambio en la carga o cualquier otra perturbacin implicara, en
los casos de aumento de la demanda de potencia, una mayor
solicitud de sta a las reas de control vecinas produciendo un
desajuste
mantiene
en
el
las
rea
lneas
de
de
intercambio.
control
dentro
de
Por
unos
tanto
el
mrgenes
AGC
de
funcionamiento adecuados y por aadidura contribuye a que el
sistema total se mantenga a su vez dentro de los lmites de
funcionamiento requeridos.
Para conseguir esto el sistema AGC calcula una variable
denominada error de control de rea ACE12, para cada rea de
control, mediante la expresin [DEME-77]:
12
Del ingls : ACE = Area Control Error.
TELECONTROL DE REDES ELCTRICAS
19
ACE = Error neto de intercambio + Bf * Error en la frecuencia
donde Bf es un parmetro caracterstico de la frecuencia. Cuando
el sistema est trabajando correctamente, con las inevitables y
continuas
variaciones
en
el
intercambio
neto
en
la
frecuencia, el valor de la variable ACE debe estar siempre lo
ms cercano posible a cero. Para el ejemplo de la Fig. 4 la
expresin a calcular sera:
ACE = (PAd + PBd + PCd) - (PA + PB + PC) + Bf * f
donde los Pid son los valores de intercambio establecidos y los
Pi son los valores reales como ya vimos antes.
La estructura bsica de un sistema AGC estara formada,
como se puede ver en la Fig. 5, por dos bucles, uno interno con
Fig. 5 : Estructura en dos bucles del AGC.
controladores L(s), los cuales gobernaran los generadores de
potencia manteniendo dentro de los valores prefijados el valor
de la frecuencia y otro externo, con controladores K(s), los
cuales gobernaran los canales de intercambio de potencia de
TELECONTROL DE REDES ELCTRICAS
manera
que
vare
la
20
produccin
de
potencia
necesaria
para
conseguir el equilibrio requerido.
2.1.1.3.- DESPACHO ECONMICO
El
sistema
elctrica
sea
AGC
garantiza
satisfecha
que
pero
no
la
demanda
tiene
en
de
potencia
cuenta
posibles
implicaciones econmicas. Por tanto cuando es posible afrontar
un
incremento
de
la
demanda
por
diferentes
mecanismos,
se
plantea la cuestin de hacerlo con el menor coste marginal
posible: esto es lo que realiza el despacho econmico.
El
objetivo
establecer
general
bsicamente
en
del
cmo
despacho
repartir
econmico
la
se
puede
produccin
de
potencia, entre los distintos suministradores disponibles, de
tal manera que minimice el coste de produccin, mantenindose
siempre dentro de los lmites de seguridad del sistema. Este
proceso de planificacin debe asegurar la suficiente energa y
capacidad para satisfacer las necesidades del sistema, operando
bajo
los
lmites
estabilidad.
Las
requeridos
fuentes
de
de
fiabilidad,
potencia
seguridad
disponibles
para
esta
programacin pueden ser diferentes como las hidroelctricas,
trmicas y nucleares, as como las lneas de intercambio con
otras reas de control, que tambin actan como fuentes de
potencia.
Dado que la energa elctrica es difcilmente almacenable,
por lo que es necesario en cada momento producir la energa que
TELECONTROL DE REDES ELCTRICAS
se
necesita
consumir,
21
existe
otra
tarea
importante
del
despacho econmico que consiste en prever, con cierto tiempo de
antelacin,
[MASI-85],
los
de
generadoras
lo
posibilidad
ms
posibles
manera
van
que
aumentos
ya
de
tenga
proporcionar,
econmica.
Estas
la
demanda
dispuesto
cundo,
previsiones
se
elctrica
qu
cul
plantas
es
la
realizan
partir del consumo normal, propiciado por la economa y el
clima del lugar, al que se le da el nombre de carga base y
teniendo en cuenta predicciones a largo y corto plazo.
La predicciones a largo plazo abarcan periodos de tiempo
de uno a varios aos y nos van a dar la carga base prevista
para los prximos aos. Se basa en estudios de crecimiento
econmico13 y de poblacin, tasa de construccin de casas y
venta de electrodomsticos, extrapolacin de curvas de consumo
de aos anteriores, etc.
Las predicciones a corto plazo cubren intervalos de tiempo
menores, del orden de un da o menos, a semanas, y nos van a
dar las variaciones que se van a producir en el consumo de
potencia sobre la carga base. Su clculo se basa en factores
como
la
existencia
de
eventos
especiales,
como
pueden
ser
ferias, actividades deportivas, etc.; parte meteorolgico, en
donde temperaturas muy bajas implican mayor uso de calefaccin
y temperaturas muy altas implican uso de la refrigeracin14 y la
13
14
Variaciones en el PIB.
Se suele hacer una correccin del 2% por cada 5C de variacin con
respecto a la temperatura normal del mes.
TELECONTROL DE REDES ELCTRICAS
22
experiencia del propio operador del sistema que puede apreciar
otros factores difcilmente medibles como falta de iluminacin
natural por nubes, niebla, etc.
Atendiendo a todo esto el problema general del despacho
econmico se ha descompuesto en distintos subproblemas, cada
uno de ellos relacionado con un tipo de intervalo temporal. De
esta
manera
tenemos
siguientes
las
subdivisiones
[PODM-77]:
a)
Programacin
PROGRAMACION
CADA SEMANA
de
Unidades fuera de servicio
Consumo semanal de energa hidroelctrica
recursos semanal, pudiendo
llegar en algunos
casos
PROGRAMACION
CADA HORA
a una programacin a uno o
Lista de unidades en servicio
varios aos.
b)
Programa de intercambio de energa
Programacin
recursos
cada
de
hora,
PROGRAMACION
CADA MINUTO
Base econmica
Factores de participacin
pudiendo alcanzar esta
programacin
hasta
siguiente
los
el
da
prximos
AGC
CADA SEGUNDO
das.
Niveles de produccin deseados
c)
Programacin
de
recursos minuto a minuto.
Fig. 6 : Esquema general del despacho
econmico al que le hemos aadido el AGC.
Los
implican
subproblemas
intervalos
que
de
tiempo
ms
grandes
son
resueltos
primero, ya que la informacin y las decisiones que se obtienen
de
ellos
se
utilizan
como
datos
en
los
subproblemas
de
TELECONTROL DE REDES ELCTRICAS
intervalos
de
representado
tiempos
la
ms
23
cortos.
interaccin
En
existente
la
Fig.
entre
los
hemos
distintos
subproblemas, al que le hemos aadido, en el ltimo paso, el
AGC que representara una actuacin sobre el sistema del orden
del segundo.
Fig. 6 : Esquema general del despacho econmico al que le hemos aadido el
AGC.
La planificacin semanal no resulta ser tan interesante
para un centro de control de energa como lo puedan ser la
programacin
cada
hora
variaciones continuamente.
minuto
minuto
donde
surgen
Por tanto la funcin de despacho
econmico se refiere principalmente a estas dos ltimas. Los
programas del despacho econmico que generalmente se utilizan
hoy en da usan algoritmos basados en la resolucin de las
ecuaciones de coordinacin, donde las operaciones del mismo
nombre requieren que la produccin de energa sea distribuida
de
tal
manera
implicadas
sea
que
el
el
coste
mnimo.
de
cada
Generalmente
una
se
de
las
sigue
un
unidades
proceso
iterativo en el que se va ajustando el valor de una constante,
resolviendo en cada caso las ecuaciones de coordinacin hasta
que la suma de la energa producida es igual a la carga del
sistema ms las prdidas de transporte.
El clculo de los factores de penalizacin, que aparecen
en estas ecuaciones, en las prdidas por transmisin se suelen
realizar a intervalos de diez minutos, lo cual resulta adecuado
ya que en ese intervalo de tiempo ocurren pocos cambios si nos
encontramos bajo las condiciones normales de funcionamiento.
TELECONTROL DE REDES ELCTRICAS
24
Naturalmente los factores de penalizacin se pueden calcular
tambin por un cambio importante en la carga del sistema o en
la salida de algn transformador.
Los factores principales que intervienen en el programa
del despacho econmico son los siguientes :
- Coste marginal de uno de los generadores
- Precio del combustible
- Gestin del combustible
- Costes de mantenimiento
- Prdidas por transmisin en la red
Sin
embargo
en
la
prctica,
como
siempre
ocurre,
son
varias las razones que restringen el funcionamiento al cien por
cien de este programa de despacho econmico. En primer lugar la
capacidad de regulacin de una compaa elctrica depende del
tipo de centrales con las que opere: capacidad de regulacin
casi
nula
en
las
nucleares;
media-baja
en
las
trmicas,
dependiendo del tipo de combustible; y alta en la hidrulicas.
Por otro lado, razones polticas y econmicas de otro tipo15
pueden superponerse a las simplemente tcnicas a la hora de
seleccionar los generadores a usar. Y por ltimo, la cada vez
mayor coordinacin entre las empresas, hace de la regulacin un
problema global que necesita de un gestor de la red total,
papel
15
desempeado
en
Espaa
por
Red
Elctrica
S.A.,
Por ejemplo, consumo de carbn nacional para impedir el hundimiento
del sector, etc.
TELECONTROL DE REDES ELCTRICAS
25
disminuyendo la capacidad particular de repartir la generacin
de electricidad.
2.1.1.4.- ESTIMADOR DE ESTADO
El
error
contenido
en
una
medida
individual
es
desconocido, por ello nunca podremos obtener el verdadero valor
de una cantidad que nos interese. Para poder discriminar entre
medidas correctas e incorrectas, as como mejorar la exactitud
en los valores de las magnitudes medidas, se hace necesario la
existencia de una cierta redundancia en las medidas, es decir,
tomar ms de una medida de la cantidad que nos interesa.
Para entender mejor este razonamiento vamos a considerar
un ejemplo lejos de lo que es una red elctrica: supongamos que
tenemos
inters
en
medir
la
temperatura
de
un
determinado
proceso. Naturalmente que un buen termmetro sera lo adecuado,
sin embargo, si esa temperatura se convierte en un parmetro
crtico, ese nico termmetro quizs no sera suficiente para
estar
seguro
de
su
comportamiento.
Por
tanto
un
segundo
termmetro aadido mejorara los resultados que se obtengan,
aunque en el caso de que sus valores difieran en ms de una
cierta
cantidad,
correctamente
nos
pero
indicara
seguiramos
que
el
sistema
sin
saber
cul
no
funciona
de
las
dos
medidas es la correcta. Un tercer termmetro sera la solucin
aunque
en
algunas
ocasiones
se
recurre
otro
parmetro
distinto, por ejemplo medir la presin, y a partir de un modelo
matemtico que relacione presin y temperatura obtener el valor
TELECONTROL DE REDES ELCTRICAS
26
deseado. En este ejemplo hemos necesitado una redundancia de
tres a uno, como mnimo, para obtener un valor fiable.
En
los
sistemas
de
potencia
no
es
la
temperatura
la
magnitud que ms nos interesa medir, en general se tratar de
tensiones y ngulos de fase. Por ello se puede formular un
modelo matemtico que reproduzca el comportamiento de la red
elctrica,
que
junto
con
COMIENZO
tcnicas
de
estimacin
de
PARAMETROS
ESTRUCTURA
estados
nos
va
permitir
obtener
los
datos
deseados
sin
necesidad
de
duplicar
MODELO
ESTADOS
OBSERVABILIDAD
ANALISIS
TOPOLOGICO
mediciones excesivamente.
MEDIDAS
PREFILTRADO
En
la
representado
Fig.
la
ESTIMADOR
hemos
lgica
DETECCION
ERRORES
de
funcionamiento del estimador
NO
E?
de
estado.
Como
se
ve
SI
comienza
determinando
qu
IDENTIFICACION
MODIFICACION
FIN
parte de la red va a estudiar
o es observable actualmente,
Fig. 7 : Lgica de funcionamiento del
estimador de estado.
para ello utiliza el modelo
de la red as como la estructura actual de la red, que la
obtiene a partir de los estados de cada interruptor del sistema
mediante el llamado anlisis topolgico. En el siguiente paso
el estimador de estado con las medidas recibidas, despus de un
prefiltrado
donde
se
prescinde
de
los
valores
claramente
TELECONTROL DE REDES ELCTRICAS
27
errneos, va puliendo los valores obtenidos con los estimados y
viceversa
de
manera
que
es
capaz
de
detectar
errores
subsanarlos. Una vez resuelto todo el proceso, si no encuentra
ms errores, da por finalizada su tarea.
Por tanto el estimador de estado se puede entender [DYLI77] como un procedimiento matemtico para calcular, a partir de
un conjunto de medidas de la red, la "mejor" estimacin posible
de las magnitudes de tensiones y ngulos de fase de la red. Se
supone que el conjunto de medidas utilizadas para este fin
poseen el grado de diversidad y redundancia necesarios para
permitir
la
correlacin
estadstica
correccin
de
las
medidas, detectando datos errneos y obteniendo los valores de
cantidades no enviadas como dato. En cada proceso cada medida
tomada contribuye a la estimacin de ms de una magnitud y cada
magnitud se estima a partir de ms de una medida [DOPA-77].
Las
principales
misiones
encomendadas
al
estimador
de
estado sern las siguientes:
- Determinacin del estado de la red conociendo sus
variables elctricas en cualquier punto, ello nos
permitir calcular datos no enviados o perdidos en
la transmisin e identificar errores.
- Mejorar la precisin de las medidas mediante la
contrastacin de un dato por varias vas.
-
Proporcionar
datos
de
entrada
la
funcin
de
monitorizacin.
- Proporcionar los datos del bus de carga para llevar
TELECONTROL DE REDES ELCTRICAS
a
cabo
otras
28
funciones
como,
por
ejemplo,son:
anlisis de seguridad, flujo de carga, etc.
Se puede suponer que el estimador de estado nos va a
proporcionar una "fotografa" de la red, indicndonos el estado
actual que sta presenta. Sin embargo esta idea es falsa ya que
en el tiempo durante el cual se han realizado las medidas han
podido ocurrir fenmenos que desvirten esa imagen que nos da
de
la
situacin
actual
de
la
red.
Cuando
el
sistema
se
encuentra en el estado normal de funcionamiento, que debe ser
en la mayora de los casos, el estimador de estado nos dar,
con
mucha
aproximacin,
el
estado
real
del
sistema.
Sin
embargo, cuando nos encontramos en el estado de emergencia ese
desfase temporal entre dos medidas que suponemos simultneas
puede llevarnos a trabajar con errores.
2.1.1.5.- ANLISIS DE SEGURIDAD
El concepto de seguridad en un sistema de generacin y
distribucin de energa elctrica ya lo vimos cuando hicimos la
introduccin al concepto de centro de control. Sin embargo,
podemos decir, en lneas muy generales, que todos entendemos
que una red elctrica es segura cuando la probabilidad de que
se
presente
cualquier
un
apagn
elemento
generalizado
simple
de
la
es
baja.
red
puede
El
fallo
de
provocar
la
interrupcin del suministro en una amplia zona geogrfica. El
coste de esa situacin tiene dos vertientes: por un lado el
TELECONTROL DE REDES ELCTRICAS
29
consumidor resulta afectado con la incomodidad o paralizacin
de su actividad y por otro lado, el no consumo de energa, con
la
prdida
de
facturacin
correspondiente,
lleva
una
disminucin de los ingresos de la compaa suministradora, pero
no as de sus gastos, que slo se ven reducidos en muy pequea
medida.
Por
ello
es
evidente
que
conseguir
la
seguridad
del
sistema debe ser unas de las funciones ms importantes que debe
realizar un centro de control, ya que implica el conservar al
sistema
de
potencia
dentro
de
los
lmites
establecidos
sin
perder ninguna de sus caractersticas requeridas. El sistema
debe operar de tal manera que se obtenga el mximo rendimiento
econmico con la mxima seguridad, dentro de los lmites del
sistema. Desgraciadamente la optimizacin de la seguridad y de
la economa de operacin son objetivos contrapuestos que deben
ser cuidadosamente equilibrados.
Para conseguir este
objetivo
se
debe
trabajar
en
tres
frentes [DOPA-77]:
- Monitorizacin del sistema.
- Anlisis de contingencias.
- Estrategias de correccin.
Con la primera de ellas, que ya hemos visto en la funcin
SCADA, pretendemos conocer mejor las condiciones actuales en
que se desenvuelve el sistema. Se trata de un anlisis esttico
ya que nos limitamos a comparar los datos obtenidos con unos
TELECONTROL DE REDES ELCTRICAS
30
lmites de referencia y presentarlos al operador. La segunda
determina los posibles efectos producidos por cortes en los
servicios del sistema. Por ltimo, la tercera, proporciona al
operador del sistema en tiempo real la pauta a seguir para
eliminar condiciones indeseables del sistema.
El anlisis de contingencias consiste en la simulacin
de
fallos y/o cortes en las unidades de produccin de energa as
como en los medios de transporte de sta, con la finalidad de
estudiar su efecto sobre las tensiones, los flujos de potencia
y la estabilidad del sistema en su conjunto.
Este tipo de anlisis de contingencias tiene una doble
vertiente en cuanto a su utilidad, ya que se puede utilizar
tanto en tiempo real, con los datos que en ese momento se estn
produciendo, como con datos hipotticos y que por tanto slo
sirve
para
prever
futuras
situaciones.
Existen
diferencias
fundamentales cuando se lleva a cabo este estudio en ambas
situaciones:
- Condiciones actuales
del
sistema:
en
tiempo
real
el
estado actual del sistema debe ser conocido para saber a qu
estado resultante se ir el sistema cuando se produzca el corte
de alguna de los servicios del sistema. Tambin hay que tener
en cuenta que la seleccin de posibles contingencias a estudiar
depender mucho de las condiciones actuales de funcionamiento
del
sistema
mientras
que
si
utilizamos
el
anlisis
de
contingencias con datos hipotticos no estamos limitados por
TELECONTROL DE REDES ELCTRICAS
31
nada en cuanto a nuestras suposiciones.
- Seleccin de contingencias: en el estudio hipottico las
posibles contingencias se simulan de acuerdo con un criterio de
orden
de
contingencias,
contingencias
dependen
mientras
de
las
que
en
tiempo
condiciones
real
actuales
estas
lo
cual
indica que puede incluir contingencias de rdenes diferentes.
Tambin ocurre que en los estudios no reales se tiende ms a
suponer cortes en la produccin o transmisin mientras que en
tiempo
real
el
estado
actual
de
los
interruptores
puede
resultar de ms inters para evitar "cadas" de partes del
sistema en cascada.
En el anlisis de contingencias existen partes del propio
sistema
que
resultan
inaccesibles
al
SCADA
incluso
otros
sistemas distintos, interconectados con el sistema que estamos
estudiando,
que
son
los
llamados
sistemas
externos.
Las
condiciones de operacin de estos sistemas influyen y afectan
al
anlisis
realizando.
de
contingencias
Por
ello
que
existen
del
sistema
estamos
tcnicas16
diversas
para
"sustituir" al sistema externo y poder incluirlo en el anlisis
de contingencias o en otros mdulos de clculo.
Conocido
llevar
ecuaciones
16
cabo
de
el
equivalente
el
la
anlisis
red
de
con
externo
del
sistema
contingencias
las
se
puede
resolviendo
contingencias
las
simuladas
Reduccin convencional del sistema externo, Identificacin de la red,
Equivalente estocstico, etc.
TELECONTROL DE REDES ELCTRICAS
32
correspondientes. Sin embargo si queremos tener en cuenta las
incertidumbres en los datos facilitados puede ser til llevar a
cabo un procesado posterior de la informacin obtenida para
conseguir resultados estadsticos de los mismos en donde, entre
otras cosas, conozcamos su varianza.
Las
estrategias
de
correccin
proporcionan
al
operador
actuaciones posibles en el caso de que el sistema haya superado
alguno de los lmites establecidos. Esto ha podido ocurrir como
consecuencia de la presencia de contingencias que ha llevado al
sistema
fuera
del
estado
normal
de
funcionamiento.
Los
principales medios de que dispone el operador para llevar a
cabo las acciones de correccin son: la programacin de la
generacin
de
reguladores
tensin
potencia,
en
carga
cambio
de
intercambio
en
generadores
transformadores,
de
potencia
de
reactiva,
programacin
con
las
de
redes
interconectadas, etc. Se han propuesto diversos mtodos para
obtener estas estrategias de correccin. La mayora de ellos se
basan en optimizar alguna funcin del sistema como puede ser el
coste de produccin, las prdidas en transporte, etc. sujeto
siempre el sistema a las limitaciones fsicas de los servicios
que ste presta y al cumplimiento de las leyes de la red.
TELECONTROL DE REDES ELCTRICAS
33
Fig. 8 : Posibles estados del sistema.
En la Fig. 8 vemos los distintos estados en que se puede
encontrar el sistema junto con las distintas conexiones que hay
entre ellos. Se puede observar cmo, incluso en el estado de
emergencia, la situacin puede ser reversible, no as cuando
aparecen prdidas de carga importantes en cuyo caso se llega a
la "cada" de grandes partes del sistema, lo que nos lleva a un
estado extremo o de colapso, del cual slo se puede salir a
travs de la restauracin del sistema.
2.1.1.6.- OTRAS FUNCIONES
TELECONTROL DE REDES ELCTRICAS
Hasta
pueden
aqu
hemos
presentar
representamos
en
34
visto
las
principales
los
centros
de
control.
un
cuadro
esquemtico
funciones
En
la
estas
Fig.
que
9
funciones
indicando la relacin que existe entre ellas. En este esquema
se
han
sealado
las
relaciones
ms
evidentes
ya
que
la
informacin que produce cualquier funcin est a disposicin de
las dems funciones si stas la necesitan.
Sin
embargo
hay
otras
funciones,
de
las
que
no
hemos
hablado todava y que veremos, no de forma exhaustiva, ms
brevemente en este ltimo apartado dedicado a las funciones de
un centro de control. Para ello vamos a desarrollar un panorama
general de las tareas que desempean los centros de control.
En
lneas
generales
diremos,
como
ya
sabemos,
que
un
centro de control dirige todos los aspectos que ataen a un
sistema de potencia. Las variables que maneja son de dos tipos:
variables
potencia
dependientes,
reactiva
como
pueden
producida,
flujos
ser
de
la
tensin,
potencia,
fase,
etc.
variables independientes, como son el consumo de potencia y de
carga, potencias generadas, tomas de transformadores, tensiones
de
consigna,
etc.
Algunas
de
estas
ltimas
variables
son
definibles por el operador del sistema por lo que se les da el
nombre de variables de control.
TELECONTROL DE REDES ELCTRICAS
35
Fig. 9 : Esquema general de las funciones de un centro de control.
Entre estos dos tipos de variables existen determinadas
relaciones
que
implican
restricciones
al
funcionamiento
del
sistema. Existen restricciones de igualdad, que son ecuaciones
o
sistemas
de
ecuaciones
que
la
red
debe
cumplir
restricciones de variables en las cuales se limitan los valores
posibles
de
algunas
variables,
lo
cual
se
expresa
TELECONTROL DE REDES ELCTRICAS
36
matemticamente mediante inecuaciones. Estas restricciones de
variables son de dos tipos: lmites fsicos de las mquinas,
como es la capacidad mxima de generacin, capacidad de las
bateras
de
condensadores
explotacin,
como
son
reactancias,
los
flujos
etc.
mximos
lmites
de
lneas
por
transformadores, tensiones mximas y mnimas en los nudos, etc.
Naturalmente
ambos
igual
ya
forma
tipos
que,
de
por
lmites
no
son
considerados
ejemplo,
un
generador
no
de
puede
suministrar ms MW de los indicados por su capacidad mxima,
sin embargo, una lnea, con una capacidad mxima de transmisin
de 200 MVA, puede trabajar temporalmente con 201 MVA.
Como ya hemos visto este control del sistema se lleva a
cabo, en la mayora de los casos, siguiendo un criterio que
minimice alguna magnitud en concreto y siempre que las acciones
a realizar sobre el sistema nos lleve a un estado posible del
mismo.
Por
ello
suministrados
por
frecuencia-potencia,
el
la
centro
de
funcin
igualando
control,
SCADA,
la
con
regula
produccin
de
los
la
datos
pareja
potencia
al
consumo real en cada instante (funcin AGC), indicando en cada
momento
estado),
mnimo
el
estado
aplicando
(funcin
actual
del
siempre
despacho
sistema
que
se
(funcin
pueda
econmico),
estimador
criterios
y
de
criterios
de
coste
de
minimizacin de emisiones contaminantes (funcin despacho de
medio ambiente), haciendo mnimo las prdidas por transporte
(funcin
minimizacin
de
prdidas
reactivas),
minimizando
tambin las desviaciones respecto al perfil ptimo de tensiones
(funcin de control automtico de tensiones), haciendo mnimo
TELECONTROL DE REDES ELCTRICAS
el
nmero
de
actuaciones
37
necesarias
sobre
el
sistema
para
eliminar violaciones de los lmites de explotacin (funcin
control correctivo) y todo ello conservando al sistema dentro
de los mrgenes de seguridad establecidos (funcin anlisis de
seguridad), en donde las soluciones que se obtengan deben ser
flexibles, rpidas y fiables.
2.1.2.- COMPONENTES DE UN CENTRO DE CONTROL
Hasta ahora hemos visto qu entendemos por un centro de
control y cules son las funciones que puede llevar a cabo. En
este nuevo apartado vamos a ver los componentes que forman un
centro de control y que le van a permitir cumplir satisfactoriamente todas las funciones a l encomendada.
En los sistemas de control modernos se considera [AMEL-91]
al
centro
de
control
como
el
conjunto
de
ordenadores,
perifricos y los subsistemas adecuados de entrada/salida que
permiten al operador del sistema monitorizar el estado actual
de la red y controlarla. Por ello el centro de control debe ser
un
sistema
que
funcione
en
tiempo
real
para
ello
los
ordenadores que lo implementen tambin deben serlo. Esto quiere
decir bsicamente que los ordenadores dedicados a esta tarea
deben
poseer
un
sistema
operativo
en
tiempo
real
de
caractersticas probadas y eficientes en este campo.
Para la descripcin de las distintas partes que componen
un
centro
de
control
hemos
dividido
esta
seccin
en
tres
TELECONTROL DE REDES ELCTRICAS
38
subsistemas: subsistema de ordenadores, subsistema de software
y subsistema hombre-mquina.
2.1.2.1.- SUBSISTEMA DE ORDENADORES
El subsistema de ordenadores es la herramienta principal
con que cuenta el centro de control para llevar a cabo su
tarea. Es el elemento bsico que controla la generacin y la
transmisin de la energa, la recoleccin y el anlisis de los
datos obtenidos, la creacin de operaciones de registro17 y la
actualizacin de los datos presentados en los monitores.
Los
elementos
bsicos
de
un
subsistema
de
ordenadores
incluyen la unidad central de proceso CPU18, los terminales de
entrada/salida, la memoria principal y los perifricos, como se
puede ver en la Fig. 10. La CPU es el controlador principal del
ordenador, es el encargado de llevar a cabo las operaciones
aritmticas
as
como
de
tomar
las
decisiones
lgicas.
La
memoria principal es el lugar donde se almacenan los datos que
maneja el ordenador y tambin los programas que ste ejecuta.
Los terminales de entrada/salida transmiten los datos entre la
memoria principal y los perifricos del sistema, mientras que
stos
convierten
los
datos
que
produce
el
ordenador
un
formato fcilmente entendible por el hombre y viceversa, es
17
Donde se almacena las ejecuciones realizadas por el ordenador,
incluyendo las cintas utilizadas, los ajustes de control, las paradas y
otros datos pertinentes.
18
Del ingls : CPU = Central Processing Unit.
TELECONTROL DE REDES ELCTRICAS
39
Fig. 10 : Componentes de un ordenador.
decir,
facilita
convierte
al
ordenador.
informacin
ordenador
La
CPU
en
bajo
una
la
que
el
operador
informacin
direccin
del
del
sistema
utilizable
sistema
por
el
operativo
ejecutar programas de aplicacin los cuales mantendrn la base
de datos del sistema y controlarn el sistema de potencia.
Los criterios de diseo de un centro de control sobre
capacidad, tiempo de respuesta y mantenimiento sugieren [BLYN77] que stos posean una configuracin "dual", en la que los
ordenadores, que poseen la estructura que hemos visto arriba,
se encuentran duplicados, ya que situar todas las funciones en
tiempo real, la monitorizacin y el control sobre un nico
procesador hace extremadamente difcil e impracticable obtener
altos niveles de fiabilidad y velocidad.
TELECONTROL DE REDES ELCTRICAS
40
Fig. 11 : Estructura dual del subsistema de ordenadores.
Esta
configuracin
dual
se
muestra
de
una
manera
muy
simplificada en la Fig. 11 (a) donde los ordenadores A y B son
dos ordenadores idnticos.
Existen distintas formas en las que asignar las funciones
a realizar por cada uno de estos ordenadores. Un forma sera
dedicar un ordenador a realizar todas las tareas, crticas o
no, permaneciendo el segundo en estado de alerta o espera,
dispuesto
entrar
en
servicio
en
cualquier
instante.
Este
procedimiento evita los problemas que presentaba el uso de un
nico
ordenador
criterio
que
que
llevara
tambin
se
cabo
aplica
todas
consiste
las
tareas.
Otro
en
repartir
las
funciones entre los dos ordenadores de manera que uno de ellos,
al que se llama primario, realiza las funciones crticas en
tiempo real mientras el otro, al que se le llama secundario,
adems
de
crticas,
estar
va
siempre
realizando
dispuesto
otras
tareas
asumir
de
apoyo,
estas
las
tareas
que
se
llaman "fuera de lnea". En la Fig. 11 (b) representamos los
dos
ordenadores
conectados
entre
para
representar
esa
disposicin del ordenador secundario a sustituir en cualquier
momento al primario. Esta conexin se puede llevar a cabo de
TELECONTROL DE REDES ELCTRICAS
41
manera automtica, en caso de producirse un fallo, o de manera
manual, en cualquier instante que el operador lo solicite.
Cada
parte
de
la
configuracin
dual
no
est
formada
nicamente por un ordenador, en muchas ocasiones se le coloca
otro ordenador previo, ver Fig. 12 (a), que se le conoce con la
expresin inglesa "front-end", el cual tratara la adquisicin
de los datos, mejorando el tiempo de respuesta general del
sistema,
ya
que
el
"front-end"
suministra
los
datos
al
ordenador ya procesados. En general estos ordenadores tienen la
capacidad suficiente para manejar l solo todos los canales de
adquisicin de datos del sistema, por tanto tambin tendremos
una configuracin dual en estos ordenadores.
Para evitar los efectos de posibles fallos tenemos dos
posibles configuraciones que representamos en la Fig. 12. En la
primera
de
ellas,
(b),
la
conexin
slo
se
da
entre
los
ordenadores principales, en la segunda, (c), adems, existe una
conexin entre los "front-end" previos.
TELECONTROL DE REDES ELCTRICAS
42
Fig. 12 : Estructuras duales "front-end" - ordenador.
Otra configuracin posible es la que mostramos en la Fig.
13
(a)
en
conectados
la
a
que
los
los
dos
dos
odenadores
ordenadores
"front-end"
principales
de
estn
manera
que
pueden trabajar cualquier "front-end" con cualquier ordenador
principal.
En
la
Fig.
13
(b)
mostramos
las
conexiones
realizadas para evitar los posibles fallos en los distintos
elementos del sistema.
TELECONTROL DE REDES ELCTRICAS
43
Fig. 13 : Configuracin "front-end" - ordenador completa.
Con el paso del tiempo la configuracin de un centro de
control ha ido evolucionando de manera que se han introducido
mejoras tanto en el hardware como en el software. Hoy en da se
tiende a la utilizacin de los llamados "sistemas abiertos".
Este
concepto
lleva
la
utilizacin,
en
los
centros
de
control, de las redes de rea local LAN19, la cual permite a los
distintos equipos que configuran el centro de control, usando
protocolos estndares, una interconexin entre ellos directa y
lgica. Incluso permite aadir nuevas prestaciones o funciones
sin necesidad de grandes cambios en el sistema. En la Fig. 14
mostramos un esquema tpico de esta configuracin.
19
Del ingls : LAN = Local Area Network.
TELECONTROL DE REDES ELCTRICAS
44
Fig. 14 : Estructura del subsistema de ordenador basado en LAN.
En lneas generales podemos decir que la tendencia actual
es disear centros de control basados en sistemas abiertos, con
canales de entrada/salida redundantes, en donde cada tarea a
llevar a cabo por el centro de control la realiza un multiprocesador dual independiente [AMEL-91]. En la Fig. 15 vemos una
configuracin
de
este
tipo,
en
la
que
la
filosofa
de
utilizacin consiste en usar uno de los multiprocesadores para
todas las tareas encomendadas, quedando el segundo de ellos en
espera por si surge algn fallo en el sistema o es requerido
para ello.
TELECONTROL DE REDES ELCTRICAS
45
Fig. 15 : Estructura del subsistema de ordenadores con multiprocesadores.
2.1.2.2.- SUBSISTEMA DE SOFTWARE
El software de un centro de control est formado por un
conjunto de programas de aplicacin que se ejecutan, de acuerdo
con
el
sistema
operativo
del
sistema,
en
un
ordenador
multitarea o distribuidos en distintos procesadores como ya
hemos visto que era posible en el apartado anterior.
TELECONTROL DE REDES ELCTRICAS
46
En la Tab. 3 adjunta, incluimos los programas de aplicacin
utilizados
ms
asiduamente,
describiendo,
continuacin,
algunos de ellos.
Tab. 3 : Software ms comn en un centro de control.
-
Adquisicin de datos
Base de datos
Dilogo hombre-mquina (MMI)
Entrada/salida comunicaciones locales
Control automtico de la generacin
Realizacin de informes
Funciones EMS
- Adquisicin de datos
En
formado
muchas
ocasiones
por
conjunto
un
este
de
programa
subprogramas
de
aplicacin
cada
uno
de
est
ellos
dedicados a una tarea especfica. Entre estas tareas podemos
destacar
estas
tres:
Funcin
de
comunicacin
con
las
RTU,
Secuencia de eventos SOE20 y Estadsticas de comunicacin.
Cuando
se
reciben
los
datos
enviados
por
la
RTU
el
programa de adquisicin de datos es el encargado de analizar
cada uno de ellos para determinar si se encuentra entre los
lmites
estable-cidos.
Tambin
determina
el
estado
de
cada
punto del sistema y lo compara con su estado anterior para
determinar
si
ha
cambiado.
Si
eso
es
as
lo
notifica
al
programa de aplicacin de alarma por si ese cambio indicara
20
Del ingls : SOE = Sequence Of Events
TELECONTROL DE REDES ELCTRICAS
47
algn cambio que altere el estado del sistema.
La secuencia de eventos (SOE) es un programa de aplicacin
especial
que
se
ejecuta
en
coordinacin
con
la
funcin
de
comunicacin con los RTU. En cada RTU se almacena, con una
precisin de milisegundos, los cambios de estado producidos as
como el instante en que ocurri. El conjunto de datos as
elaborados deben estar a disposicin del operador del sistema
si ste los solicita.
Por ltimo el programa de adquisicin de datos llevar a
cabo la monitorizacin de la calidad de los datos recibidos y
para ello realiza estudios estadsticos de los mismos. A partir
de
estos
estudios,
conectado
con
otros
programas
de
aplicacin, puede emprender acciones para mejorar los datos
obtenidos
incluso
colocar
fuera
de
servicio
una
RTU
determinada.
- Base de datos
El programa de base de datos es bsico en un centro de
control. Su principal virtud debe ser la de velocidad. En cada
exploracin de las RTU la base de datos es actualizada y por
ello el acceso y almacenamiento de cada uno de los datos debe
ser
lo
ms
inmediato
posible,
con
el
fin
de
conseguir
prestaciones en tiempo real.
En esa base de datos no se almacena nicamente el valor
TELECONTROL DE REDES ELCTRICAS
del
dato
sino
que
adems,
48
este
programa
de
aplicacin,
le
asocia a cada medida una serie de atributos que permitirn al
programa MMI una mayor rapidez de funcionamiento. Algunos de
estos
atributos
son:
el
color
con
el
cual
van
ser
representados en pantalla, si el dispositivo en cuestin est
activado
desactivado,
si
el
valor
presente
es
real
calculado, qu relacin existe entre este valor concreto y los
lmites permitidos, etc.
- Dilogo hombre-mquina (MMI)
Este programa permite al operador del sistema visualizar
el estado de la red y actuar sobre ella para controlarla. Este
software es difcilmente separable de los dems programas de
aplicacin ya que est muy interconectado con ellos. As, por
ejemplo, debe haber una relacin muy intensa con el software de
base de datos ya que cualquier accin que sobre el sistema se
realice, a travs del MMI, debe reflejarse inmediatamente en la
base de datos.
La mayora de la aplicaciones posibles de este programa de
aplicacin se refieren a disponibilidades en el uso y manejo de
la
informacin
presentada
en
los
monitores
del
centro
de
control. As el operador del sistema podr solicitar distintas
pantallas de informacin, podr crear o editar pantallas ya
existentes, podr "sealar" algunos puntos del sistema para
actuar sobre l, podr controlar el manejo, ejecucin y cambios
en todos los dems programas de aplicacin, etc. El hardware y
TELECONTROL DE REDES ELCTRICAS
49
la estructura que permite realizar este software lo veremos un
poco ms adelante.
- Control automtico de la generacin (AGC)
Este programa capacita al centro de control, a travs de
las RTU, para determinar el modo de funcionamiento del sistema
o bajo qu criterios va a operar ste. Algunos de los modos
permitidos
son:
manual,
base,
en
donde
la
generacin
de
potencia est fijada a un valor determinado, de regulacin, en
donde
la
generacin
es
flexible
dentro
de
unos
mrgenes,
econmico, en donde la generacin efectiva pretende minimizar
los costes de produccin, etc. Algunos de los criterios de
operacin seran: intercambio constante de carga, de manera que
la cantidad de energa que entra en el sistema y la que sale de
l sea fija, frecuencia fija, en donde se altera la generacin
de potencia con el fin de mantener la frecuencia constante,
mantenimiento conjunto de intercambio y frecuencia, criterios
correctivos cada cierto tiempo para compensar la acumulacin o
la deficiencia de carga, etc.
Dentro de este programa de aplicacin podemos encontrar
incluidos
otros
implemen-taciones
programas
aparecen
de
como
aplicacin
programas
que
en
algunas
independientes.
Algunos de esos programas son: despacho econmico, que mantiene
al sistema dentro de un coste mnimo, control de reserva, que
calcula la reserva de cualquier tipo del sistema, unidad de
compromiso,
que
arranca
para
las
distintas
unidades
de
TELECONTROL DE REDES ELCTRICAS
50
generacin de potencia dependiendo de la planificacin horaria,
diaria o semanal que se haya establecido, etc.
2.1.2.3.- SUBSISTEMA HOMBRE-MAQUINA
Cuando
se
maneja
un
sistema
administrador
de
energa
(EMS), la relacin entre el propio sistema y el operador del
mismo se establece a travs de este subsistema hombre-mquina
subsis-tema MMI. Por tanto el subsistema MMI ser la "tarjeta
de presentacin" del sistema. En muchas ocasiones, la facilidad
de uso o no de este subsistema, propicia el que las empresas
del sector se decanten por un modelo u otro, dependiendo, sobre
todo, de la flexibilidad y sencillez de manejo del subsistema
MMI
ms
que
de
otras
posibles
ventajas
que
puedan
ofrecer
determinados algoritmos sofisticados de hardware.
En el diseo de subsistemas MMI, por tanto, se prima el
obtener una relacin hombre-mquina lo ms simple posible y en
donde el operador tenga que hacer el menor nmero de acciones
para controlar la red encomendada. Por otro lado tambin se
tendr que tener en cuenta las posibilidades de ampliacin del
propio subsistema a medida que el propio sistema evoluciona
durante su vida til. As, por ejemplo, aumentar el nmero de
remotas
del
sistema
instalar
ms
plantas
generadoras
de
energa implica aumentar la cantidad de datos almacenados en la
memoria,
pantallas
manejados
del
MMI.
por
el
Sin
sistema
embargo,
presentados
las
en
las
ampliaciones
ms
importantes del mdulo MMI son las debidas, no al desarrollo
TELECONTROL DE REDES ELCTRICAS
del
propio
sistema,
sino
51
al
aumento
de
las
funciones
capacidades del sistema EMS. Es esta capacidad de cambio y
ampliacin junto con el hecho de que la mayora de los mdulos
MMI estn implementados, casi a medida para cada empresa, a
partir de unos mdulos estndares de los fabricantes, lo que ha
llevado a formar un subsistema aparte con el mdulo MMI.
La carga que soporta el subsistema MMI es muy variada ya
que mientras el sistema se encuentra en el estado normal el
funciona-miento de este subsistema es relajado. Sin embargo,
cuando aparecen perturbaciones y contingencias el mdulo MMI se
convierte en un elemento crtico del sistema ya que a partir de
l debemos manejar gran nmero de alarmas, solicitar mltiples
pantallas, accionar comandos, activar procesos de restauracin,
etc., y todo ello dentro de un proceso en tiempo real. Para que
el sistema responda en este tipo de situaciones se definen una
serie de parmetros temporales, caractersticos del subsistema,
cuyos
valores
asegurar
el
mximos
estn
muy
comportamiento
estudiados
requerido.
con
el
Algunos
fin
de
de
estos
parmetros son [KENE-77]: tiempo de respuesta, que es el tiempo
transcurrido
determinada
desde
hasta
que
que
el
sta
operador
aparece
solicita
completa
en
una
pantalla
el
monitor,
tiempo de actualizacin, que es el intervalo de tiempo que
tardan
los
datos
dinmicos,
que
aparecen
en
pantalla,
en
renovarse a partir de la base de datos, y tiempo de refresco,
que
es
el
tiempo
necesario
en
presentar
completa a partir de la memoria CRT.
una
pantalla
CRT
TELECONTROL DE REDES ELCTRICAS
52
Existen distintos mtodos para acceder a las distintas
pantallas:
directamente
seleccionando
una
opcin
pgina-arriba/abajo,
travs
desde
situando
de
un
el
teclas
men,
cursor
de
usando
sobre
funcin,
teclas
de
determinadas
zonas de la pantalla, a travs de entradas alfanumricas, etc.
Generalmente se utiliza el mtodo de los mens de manera que a
partir de un men general se llega
a otro ms especfico y de este a
otro ms especfico todava. Esto
lleva a que se forme una "pirmide"
de pantallas como se puede ver en
la
Fig.
16.
En
las
figuras
siguientes, Fig. 17, 18, 19, 20 se
muestran algunas de las pantallas
que aparecen en el subsistema MMI.
Pirmide
de
Fig.
16
:
pantallas en un mdulo MMI.
TELECONTROL DE REDES ELCTRICAS
53
Fig. 17 : Pantalla de estados.
Fig. 18 : Pantalla de medidas.
En cuanto a la configuracin que presenta un subsistema
MMI sta depender del tipo de pantallas que utilice [DAMO-91].
En la mayora de los casos los EMS utilizan pantallas grficas
de caracteres, tambin
conocidas
como pantallas
semigrficas
o pantallas de grficos limitados, que emplean un conjunto de
caracteres para representar las pantallas alfanumricas como
los diagramas.
TELECONTROL DE REDES ELCTRICAS
54
Fig. 19 : Diagrama unifilar de una subestacin.
Fig. 20 : Pantalla de mandos.
Son las ms
y
por
utilizadas por dos razones, por ser ms econmicas
necesitar
pantalla.
En
la
menos
Fig.
21
tiempo
hemos
para
su
representacin
representado
una
en
estructura
tpica de mdulo MMI con pantallas grficas de caracteres. En
ella destaca el carcter dual de todo el esquema que permite a
TELECONTROL DE REDES ELCTRICAS
55
Fig. 21 : Configuracin tpica de subsistema MMI dual.
cualquiera de las consolas estar siempre en funcionamiento,
evitando as posibles fallos que en momento crticos podran
ser nefastos.
El
otro
tipo
de
pantalla
posible
es
la
pantalla
"totalmente" grfica, o simplemente pantalla grfica, la cual
acta sobre cada pxel de la pantalla, lo cual permite obtener
mejores diagramas y ms completos. En lneas generales estos
dispositivos resultan ser ms caros y de respuesta ms lenta
que los del tipo grfico de caracteres, sin embargo, con el
paso del tiempo estas inconvenientes se van reduciendo y cada
vez son ms las empresas que los incluyen en sus mdulos MMI.
TELECONTROL DE REDES ELCTRICAS
56
En la Fig. 22 se puede ver un esquema tpico de este tipo de
subsistema. Las principales caractersticas que presenta son
dos: que las consolas estn conectadas con los procesadores a
travs de una red local y que cada consola posee un procesador
grfico21,
encomendado
lo
al
cual
va
mdulo
permitir
MMI
se
que
ejecute
parte
en
del
ese
software
procesador
disminuyendo el tiempo total de presentacin de la informacin
en la pantalla.
Fig. 22 : Subsistema MMI con pantalla "totalmente" grfica.
21
En ingls se conoce como "workstation".
TELECONTROL DE REDES ELCTRICAS
57
2.2.- UNIDAD DE TRANSMISIN REMOTA
La
instalacin
de
la
funcin
SCADA
en
un
sistema
de
control elctrico implica el uso de unidades de transmisin
remota (RTU) en las distintas zonas de inters de la red, como
pueden ser las estaciones de generacin, de distribucin, de
conmutacin, etc. La misin de estas remotas ser llevar a cabo
la conexin directa entre el sistema de potencia y el centro de
control
del
mismo,
de
manera
que
enve,
desde
la
remota,
informacin de la red al centro de control y a su vez ejecute,
desde
el
centro
pretendemos
de
controlar.
control,
Se
acciones
puede
decir
sobre
que
la
la
red
unidad
que
de
transmisin remota es los ojos, los odos y las manos del
centro de control del sistema. En la mayora de los casos la
remota es una "esclava" del centro de control, sin embargo, con
el paso del tiempo, a estas remotas se le van equipando con
algn tipo de capacidades de clculo y opti-mizacin, lo cual
va a representar una cierta "emancipacin" de las mismas.
El
depende,
funcionamiento
de
un
centro
fundamentalmente,
de
la
de
control
adquisicin
de
de
energa
datos
del
sistema bajo su control. Por ello las remotas utilizadas en las
funciones SCADA de una red elctrica tienen como una de las
tareas ms importante la recoleccin de datos de la red para
trasmitirlas al centro de control, de manera que ste se haga
una idea del estado general del sistema. Los datos de ms
inters
son
aquellos
que
estn
relacionados
con
las
caractersticas propias del sistema de potencia, como podran
TELECONTROL DE REDES ELCTRICAS
58
ser tensiones, intensidades, potencias, etc., de los sistemas
de generacin, lneas de transmisin, transformadores, centros
de
distribucin,
interruptores.
etc.,
as
como
Tambin
los
datos
estados
de
dispositivos
referidos
la
energa
consumida, puede ser interesante, por ejemplo, para la funcin
de despacho econmico. Otros datos, que tambin suministran las
remotas en algunas aplicaciones, son del tipo de la temperatura
de un transformador, nivel de los tanques de combustible, nivel
del agua de un embalse, etc. Los datos elctricos son tomados
de la propia red y mediante transformadores y transductores se
convierten en tensiones o corrientes continuas muy pequeas
capaces de ser tratadas por circuitos electrnicos.
Al tratar de los datos que adquiere una remota lo primero
que tenemos que definir son las caractersticas o los rasgos
ms significativos que esos datos deben presentar. Para ello
vamos a distinguir dos aspectos distintos de cada dato [FRAN77]: tipos de datos y atributos de los mismos. En cuanto al
primero
de
ellos,
stos
pueden
ser:
entradas
digitales,
aquellas variables que slo pueden tomar determinados valores
fijos, como son alarmas, indicadores, estados de dispositivos,
etc.,
entradas
analgicas,
seal
analgica,
como
variables
pueden
ser
que
representan
tensiones,
una
intensidades,
potencia, temperatura, etc., entradas acumuladas, variables que
se van acumulando en contadores u otro tipo de dispositivos de
medida, como es la energa consumida, salidas de control son
salidas
potencia
digitales
que
transmitiendo
actan
una
sobre
accin
rels
que
del
desde
el
sistema
de
centro
de
TELECONTROL DE REDES ELCTRICAS
control
se
decide
por
59
ltimo
salidas
analgicas
que
en
algunas ocasiones se producen ya que algunos dispositivos las
necesitan para su tarea, como ocurre, por ejemplo, al indicar a
un generador la potencia solicitada en cada momento.
En los sistemas SCADA el paso de las medidas analgicas
del sistema de potencia a los datos mostrados en las pantallas
del centro de control es un proceso que est lleno de escalados
[EVAN-91] y parte de ese escalado le corresponde llevarlo a
cabo a la remota. Aqu aparece, por tanto, otra tarea ms de
las unidades de transmisin remota, tarea comprendida entre la
recogida de los datos y la emisin de esos datos al centro de
control.
escalados
En
ella
los
datos
primeramente
transductores
de
analgico-digital
por
nuevo
para
reales
los
otra
vez
terminar
tomados
del
campo
transformadores
por
son
los
los
convertidores
siendo
codificados
adecuadamente y enviados al centro de control.
En los sistemas de control las funciones que lo llevan a
cabo proporcionan a la unidad remota una serie de rdenes que
sta convierte en seales de control, como ya vimos ms arriba,
que
generalmente
actan
sobre
rels,
interruptores,
reenganchadores, etc. Sin embargo no es extrao encontrarse
casos en donde estas seales van dirigidas a otro tipo de
dispositivos como reguladores de tensin, intercambiadores de
toma, vlvulas, etc. En cualquier caso la RTU no es quien
decide sobre qu controles actuar sino que nicamente transmite
las rdenes que recibe del centro de control.
TELECONTROL DE REDES ELCTRICAS
60
En lo que se refiere a los atributos de los datos el
problema
es
siguiendo
ms
subjetivo
[FRAN-77]
los
sin
embargo
siguientes:
aqu
rango
se
del
proponen
dato,
que
pueden ser los valores mximo y mnimo del sensor, la banda de
valores dentro de la cual se supone que el valor no ha variado,
etc., frecuencia de adquisicin, tiempo mximo que se permite
que un dato est sin actualizar, en algunos casos se enva el
valor del dato slo cuando ste vara y por ltimo desfase
entre los datos, que representar la mxima diferencia temporal
permitida entre dos datos de un mismo conjunto.
Adems de todo esto existe otra informacin relativa a
cada dato adquirido, que se refiere a los requisitos que el
subsistema MMI del centro de control necesita para representar
correctamente la informacin sobre la pantalla. En este caso
nos referimos a: nombre de la variable a representar, cdigo de
color que se va utilizar en su representacin, procedimientos
de alarma, que indican los pasos a seguir, qu mensajes deben
aparecer en la pantalla y en qu orden si se produce una alarma
determinada, etc.
2.2.1.- COMPONENTES DE UNA RTU
La arquitectura de una RTU puede ser de lo ms variada,
dependiendo del tipo y nmero de seales que controle, as como
de las funciones que incluya. Sin embargo, una caracterstica
comn es su diseo modular que le permita adaptarse a las
TELECONTROL DE REDES ELCTRICAS
61
necesidades de los diferentes emplazamientos y crecer si fuera
necesario.
Segn
las
normas
ANSI/IEEE
C37.1
[ANSI-87]
una
remota est formada por el conjunto de dispositivos, mdulos
funcionales,
cualquier
elemento
que
est
interconectado
elctricamente, que intervenga en llevar a cabo, a distancia,
las
funciones
de
supervisin
del
centro
de
control.
Adems
aclara que en esta definicin se incluye el interfaz con los
canales de comunicacin pero no dichos canales y que durante la
comunicacin con el centro de control la RTU acta subordinada
a ste.
Siguiendo estos criterios y [BLOC-91] podemos indicar que
los principales componentes o subsistemas de una RTU son los
que
mostramos
en
la
Fig.
23,
en
ella
vemos
que
hay
un
subsistema de comunicacin que es el encargado de establecer el
dilogo con el centro de control, un subsistema lgico que est
formado por un microprocesador y una base de datos y que se
dedica a dirigir las funciones propias de la RTU, un subsistema
de conexin que conecta directamente la RTU con la red para
tomar datos y actuar sobre ella, una fuente de alimentacin que
suministra a la RTU las distintas tensiones que necesita para
su funcionamiento y un subsistema de prueba y MMI que permite
al operador comprobar "in situ" el funcionamiento correcto de
la remota.
TELECONTROL DE REDES ELCTRICAS
62
Fig. 23 : Componentes de una RTU.
Veremos
ahora
cada
uno
de
estos
componentes
con
ms
detenimiento.
2.2.1.1.- SUBSISTEMA DE COMUNICACIN
El subsistema de comunicacin de una RTU es el responsable
de interpretar los mensajes que recibe del centro de control,
as como de estructurar y dar formato a los mensajes que la
propia remota enva a dicho centro de control. Por ello este
subsistema es el encargado de manejar todo lo relacionado con
TELECONTROL DE REDES ELCTRICAS
63
las funciones de protocolo, que veremos ms adelante con ms
detalle.
Tambin se encarga de las funciones de seguridad ya que es
esencial protegerse contra acciones de control falsas o incluso
contra datos errneos, debidos a la presencia de ruido en los
canales de comunicacin. Estas funciones de seguridad generalmente
consisten
en
aadir
uno
varios
bits
al
final
del
mensaje de manera que la unidad que lo reciba sea capaz de
determinar si el mensaje recibido es correcto o ha sufrido
algn cambio durante su transmisin.
Generalmente cada RTU se comunica nicamente con un centro
de control, sin embargo, con la proliferacin de los sistemas
SCADA cada vez es ms corriente que una remota determinada se
comunique con dos o ms centros de control distintos, ya sean
de compaas diferentes o, siendo de la misma compaa, de
niveles
distintos.
Esta
tarea
de
comunicarse
con
distintos
centros de control, quizs utilizando protocolos diferentes, la
lleva a cabo el subsistema de comunicacin de la RTU. Tambin
se
utiliza
esta
"multi-comunicacin"
con
el
fin
de
obtener
caminos de comuni-cacin redundantes, lo cual nos va a permitir
hacer llegar los datos al centro de control de otra manera
distinta a la habitual, con lo cual, podemos evitar situaciones
de incomunicacin momentnea directa entre el centro de control
y la remota correspondiente.
Con el paso de los aos se ha visto que los fallos en los
TELECONTROL DE REDES ELCTRICAS
canales
de
comunicacin
son
64
mayores
que
los
fallos
en
las
remotas o en los centros de control del sistema. Por ello en
algunos sistemas se han establecidos tcnicas para probar el
estado del canal. Peridicamente el centro de control enva un
mensaje a cada remota y sta debe reenviarlo, sin ms, al
centro de control. En el caso de las remotas es el subsistema
de comunicacin el encargado de llevarlo a cabo. Otra tarea de
este subsistema consiste en desconectar a la remota del canal
de comunicacin cuando ha pasado ya un determinado intervalo de
tiempo22 sin que haya comunicacin entre ella y el centro de
control lo cual pretende evitar posibles bloqueos del canal de
comunicacin si fallara la unidad remota.
2.2.1.2.- SUBSISTEMA LGICO
Este subsistema representa el "alma" de la unidad remota,
en l se produce el procesado de los datos, as como todo lo
relacionado con las funciones de control de la RTU. Posee dos
funciones claramente definidas: adquisicin y escalado de los
datos, y seleccin y ejecucin de las rdenes de control sobre
la red.
El proceso de adquisicin de datos consiste en tomar de la
red elctrica dos tipos de datos: digitales y analgicos. Los
datos
digitales
son
aquellos
que
tienen
una
caracterstica
intrnsecamente binaria, susceptibles de ser representados por
22
En ingls se conoce como "time-out".
TELECONTROL DE REDES ELCTRICAS
65
un bit. Se obtienen mediante la representacin de contactos
externos
como
interruptores,
seccionadores,
etc.
Los
datos
digitales que maneja una RTU, o la informacin de la posicin
de los contactos, son de cuatro tipos: estado actual, estado
actual con memoria, que incluye los cambios producidos en los
contactos desde la ltima transmisin de datos, secuencia de
eventos SOE, donde aparecen en una tabla los cambios producidos
en los distintos contactos junto con la hora, con precisin de
milisegundos, en que ocurri, y valores acumulados, donde se
lleva a cabo una cuenta de los pulsos recibidos, por ejemplo de
los generadores, por unidad de tiempo.
Aquellos datos que representan seales analgicas sern
los datos analgicos, en este grupo se encuentra la informacin
sobre tensiones, intensidades, potencias activas y reactivas,
factores
de
generalmente,
potencia,
en
este
etc.
Estos
subsistema
datos
un
son
escalado
sometidos,
mediante
un
preprocesado de los mismos en el cual se produce conversin a
valores de ingeniera, contrastacin de rebase de lmites de
alarma, etc.
En cuanto a las seales de control las actuaciones del
sistema
sobre
la
red
suelen
tomar
la
forma
de
contactos
abiertos o cerrados, que comandan los equipos de operacin,
como interrup-tores, generadores, transformadores, etc.
disminuir
al
mnimo
la
probabilidad
de
mando
indeseado
Para
las
unidades remotas suelen tomar precauciones con el fin de evitar
que se active/desactive un elemento que no es, o activar varios
TELECONTROL DE REDES ELCTRICAS
66
contactos a la vez. Por ello las seales de control son seleccionadas primero y tras su confirmacin se ejecutan. Adems, el
subsistema
lgico,
lleva
cabo
los
algoritmos
locales
de
control que se dedican, entre otras cosas, a la deteccin,
localizacin
despeje
de
fallos,
reposicin
automtica
de
servicio, deslastre selectivo de cargas, etc.
Otras tareas de la RTU estn relacionadas con la capacidad
que presentan las remotas de trabajar con una base temporal,
como la secuenciacin de eventos, que ya hemos visto, o la
posibilidad de sincronizacin, ya sea con el centro de control
o, como en algunos sistemas, mediante la recepcin de seales
de
radio,
terrestres
va
satlite,
lo
cual
permite
una
sincronizacin general del sistema.
2.2.1.3.- SUBSISTEMA DE CONEXIN
El subsistema de conexin es el encargado de llevar a cabo
el interfaz entre el subsistema lgico de la RTU y la red
elctrica. Est compuesto de todos los dispositivos necesarios,
como transformadores, transductores, convertidores analgicodigitales, adaptadores, etc., para hacer que los datos tomados
de la red sean manejables por el subsistema lgico.
Los datos digitales son conducidos desde la red hasta el
subsistema lgico de la RTU mediante dos hilos en los cuales
hay tensin / no hay tensin. Tras su adaptacin de niveles,
opto-aislamiento y filtrado, ver Fig. 24, se almacena en la
TELECONTROL DE REDES ELCTRICAS
67
memoria del subsistema lgico para su procesado y posterior
envo al centro de control.
Fig. 24 : Subsistema de conexin de una RTU.
La captacin de los datos analgicos se suele realizar,
ver tambin Fig. 24, mediante transformadores de intensidad y/o
tensin,
un
transductor
que
lleva
la
seal
un
rango
apropiado23 y un convertidor analgico-digital que hace que el
dato sea manejable por el subsistema lgico. En cuanto a las
seales de control el subsistema de conexin acciona los rels
intermedios a travs de sus entradas/salidas adaptando la seal
de mando hasta los niveles adecuados para actuar sobre la red,
(ver Fig. 24).
23
Tpicamente de 0 a 10 voltios en corriente continua.
TELECONTROL DE REDES ELCTRICAS
68
Otro aspecto importante, del que se encarga tambin este
subsistema, es la proteccin del subsistema lgico de la RTU
del ambiente hostil que una subestacin elctrica representa
para
l.
Este
ambiente
hostil
tiene
muchas
facetas,
desde
variaciones de temperatura a lo largo del da, lo cual puede
influir en la estabilidad de los componentes de medidas, como
son los convertidores analgico-digital o los transductores,
hasta cuestiones de contaminacin en forma de suciedad, polvo,
e incluso en algunos casos atmsfera corrosiva, etc.
Sin embargo, la
conexin
se
centra
tarea
de
proteccin
principalmente
en
del
aislar
subsistema
al
de
subsistema
lgico del ambiente, nada recomendable, que desde el punto de
vista elctrico presenta una subestacin de este tipo. En el
funcio-namiento de una subestacin son muchos los factores de
tipo elctrico que pueden alterar el comportamiento normal del
subsistema lgico: se pueden presentar situaciones de sobretensin o incluso tensin inversa, pueden aparecer descargas
electrostticas, casi siempre producidas por el propio personal
de la subestacin al manejar directamente los circuitos de la
RTU,
puede
haber
interferencias
electromagntica,
tambin
producida generalmente, salvo excepciones, por los equipos de
radio del personal de mantenimiento, tambin, en estaciones
donde
se
manejan
altas
tensiones,
puede
haber
campos
electrostticos y magnticos importantes, incluso la proteccin
debe llegar a casos espordicos como la cada de un rayo o la
presencia sbita de un pico de tensin.
TELECONTROL DE REDES ELCTRICAS
69
2.2.1.4.- SUBSISTEMA TEST/MMI
Las unidades remotas poseen un interfaz MMI muy simple
pero
que
permiten
los
equipos
de
mantenimiento
detectar
fcilmente si el funcionamiento es correcto, y si no lo es,
dnde se encuentra la avera. Al conjunto de dispositivos de la
unidad
remota
subsistema
generalmente
dedicados
test/MMI.
mediante
Lleva
el
este
a
fin
cabo
uso
se
la
les
tarea
LEDs24,
de
conoce
como
de
informar,
del
correcto
funcionamiento o no de la unidad remota.
Otros dispositivos de este subsistema permiten el acceso a
la informacin mediante dispositivos externos de prueba los
cuales, una vez conectados, tienen acceso a buses internos de
la remota o incluso pueden sustituir al centro de control en
todas sus tareas con el fin de comprobar el funcionamiento y
detectar posibles fallos de la RTU.
Con el aumento de la "inteligencia" de las RTUs, a travs
de las funciones de aplicacin, o aumentando la potencia de los
microprocesadores,
se
conseguiran
subsistemas
Test/MMI
que
podran ser permanentes en los que se podran incluir paneles
de
control,
teclados
alfanumrico,
impresoras y otros perifricos.
24
Del ingls: LED = Light Emisor Diode.
pantallas
CRT
incluso
TELECONTROL DE REDES ELCTRICAS
70
2.2.1.5.- FUENTE DE ALIMENTACIN
Con el fin de ver todos los componentes que conforman una
unidad de transmisin remota, debemos ver ahora, aunque sea muy
brevemente,
el
alimentacin.
elemento
Toda
unidad
que
nos
falta:
remota
posee
su
fuente
de
una
fuente
de
alimentacin que suministra a los distintos elementos de la
misma las tensiones necesarias para su funcionamiento. Estas
tensiones suelen ser tensiones continuas de 48 y 125 voltios
aunque en algunas ocasiones aporte tambin 24 y 240 voltios.
Tambin
posee
equipos
generadores
de
120
240
voltios
de
corriente alterna lo cual asegura el funcionamiento de la RTU
aunque a sta le falle el suministro de corriente.
2.3.- SISTEMAS DE COMUNICACIN
Como ya vimos al comienzo de este documento los sistemas
de control estn formados por un centro de control, y por
varias
unidades
de
transmisin
remotas,
geogrficamente
dispersas, conectadas al centro de control mediante canales de
comunicacin de muy diversos tipos. La falta de disponibilidad
y el alto coste de estos canales de comunicacin hacen que el
diseo de los centros de control y de las remotas dependan
mucho de los canales de comunicacin disponibles. Estos canales
limitan la velocidad a la cual se llevan a cabo la adquisicin
y el control de los datos que maneja la red. Adems afecta
tambin al diseo del subsistema MMI del centro de control o
incluso a los programas de aplicacin, en cuanto a software se
TELECONTROL DE REDES ELCTRICAS
71
refiere. El "ruido", que aleatoriamente aparece en los canales
de
comunicacin,
tambin
repercute
en
el
diseo
de
los
elementos del sistema de control ya que requieren ms hardware
y software para garantizar que la informacin sea transmitida
correctamente desde la remota al centro de control y viceversa.
La configuracin que toman los sistemas de comunicacin
depender
bsicamente
de
los
siguientes
puntos:
nmero
de
unidades remotas, nmero de puntos de toma de datos en cada una
de las remotas, localizacin geogrfica de cada una de ellas, y
de
los
servicios,
equipos
tcnicas
de
comunicacin
disponibles. Naturalmente la configuracin ms simple es la
llamada
"punto
conectada
punto"
directamente
en
con
la
el
que
centro
la
de
unidad
remota
control.
Se
est
suele
utilizar en sistemas muy simples donde el nmero de puntos de
inters es muy reducido. Ver Fig. 25.
Fig. 25 : Configuracin punto a punto.
TELECONTROL DE REDES ELCTRICAS
72
Fig. 26 : Configuracin mltiple punto a punto.
Sin embargo, en la mayora de los casos, los datos a
recoger se encuentran muy dispersos, geogrficamente hablando,
por lo que la configuracin puede tomar otras formas. En la
Fig. 26 hemos representado la configuracin "mltiple punto a
punto" en ella el centro de control est conectado con cada una
de las remotas mediante un enlace. Por ello todas las remotas
pueden transmitir informacin al centro de control al mismo
tiempo y a su vez el centro de control puede enviar informacin
a una o varias remotas simultneamente.
En
la
Fig. 27
vemos
la
configuracin
de
"lnea
compartida" en la que el centro de control est conectado a ms
de una remota por medio de un nico terminal de enlace. En esta
configuracin, en cada instante, slo una unidad remota puede
transmitir informacin al centro de control.
TELECONTROL DE REDES ELCTRICAS
73
Por el contrario, el puesto central puede enviar mensajes a una
o ms estaciones seleccionadas o a todas a la vez si as lo
necesita.
Fig. 27 : Configuracin de lnea compartida.
Por ltimo, presentamos en la Fig. 28 la configuracin,
tambin de lnea compartida, en "anillo multipunto". El enlace
de comunicaciones entre todas las unidades remotas forma un
bucle cerrado o anillo, de manera que el centro de control
posee
dos
terminales
de
enlace.
cada
estacin
se
puede
acceder desde el centro de control por dos direcciones, por lo
que se proporciona una seguridad N-125, empleando un nmero de
enlaces N+1, donde N es el nmero de unidades remotas. Por
todas
25
esta
razones
esta
configuracin
es
muy
comn
en
los
Se entiende por seguridad N-1 de un conjunto de N enlaces de comunicacin al hecho de que el fallo de uno cualquiera de ellos no afecta a la
capacidad de comunicacin entre el centro de control y cada una de las RTUs.
TELECONTROL DE REDES ELCTRICAS
74
sistemas de control actuales.
Existen otros tipos de configuraciones como puede ser la
Fig. 28 : Configuracin en anillo multipunto.
configuracin en "red mallada" en la cual existen enlaces de
comunicacin entre cualquier par de remotas, lo cual implica
1
N(N - 1) 1 enlaces. Con la posibilidad de multirrutas aumenta
2
enormemente la fiabilidad y disponibilidad de la transmisin de
informacin.
Sin
embargo
el
elevado
coste
de
este
tipo
de
confi-guraciones hacen que en muy raras ocasiones se presente.
Generalmente los sistemas de control presentan lo que se
llama una configuracin "hbrida" que es una mezcla de varias
de las configuraciones vistas anteriormente, el criterio que se
adopta
en
prestaciones
su
establecimiento
que
cada
suele
configuracin
estar
aporta
basado
en
las
sobre
todo
en
TELECONTROL DE REDES ELCTRICAS
75
razones econmicas. As, por ejemplo, la configuracin de lnea
compartida reduce los costes de comunicacin, mientras que la
configuracin mltiple punto a punto posee unos canales con una
carga
menor,
con
toma
de
datos
ms
frecuentes
una
alta
fiabilidad.
En los canales de comunicacin tambin hay que tener en
cuenta
cmo
se
transporta
la
informacin.
Partimos
de
dos
puntos alejados espacialmente y pretendemos enviar una seal, o
un cambio en una seal, de manera que el receptor reconozca esa
seal o ese cambio en esa seal. Esto se puede llevar a cabo de
tres maneras: cambio de la amplitud de la seal, cambio de la
frecuencia de la seal y cambio de la fase de la seal. A este
procedimiento se le da el nombre genrico de modulacin de la
seal. En el receptor un demodulador detecta el cambio en la
seal y reproduce la informacin transmitida.
Si la informacin slo se transmite en una direccin a ese
canal se le da el nombre de canal "simplex". Si la informacin
se
transmite
entonces
el
informacin
en
ambas
canal
se
es
direcciones
pero
"semi-duplex"26,
transmite
en
ambas
no
por
simultneamente
ltimo,
direcciones
si
la
la
vez,
entonces el canal es "duplex"27. En ese caso se necesita un
modulador y un demodulador en cada extremo del canal, como se
muestra en la Fig. 29, conjunto
26
27
al
En ingls se conoce como "Half-duplex".
En ingls se conoce como "Full-duplex".
que
se
le
conoce
como
TELECONTROL DE REDES ELCTRICAS
76
"modem".
Fig. 29 : Canal doble duplex o semiduplex.
Existen dos tipos de modems: asncronos y sncronos. Los
asncronos utilizan relojes diferentes en cada terminal y por
ello la demodulacin de la seal, en el receptor, se produce a
la misma velocidad que se modul en el transmisor slo de forma
aproximada. Debido a esta aproximacin los mensajes de datos
deben ser resincronizados muy a menudo, por ello, los mensajes
son divididos en trozos de manera que cada uno de ellos lleva
sus
bits
de
sincronismo.
Este
sistema
es
ventajoso
para
mensajes cortos donde se busca una rpida sincronizacin. Para
conseguir sta hacen falta pocos bits por lo que se consigue
una
eficiencia
simplicidad,
es
relativamente
de
bajo
coste.
alta
Por
y
otro
adems,
lado
dada
los
su
modems
sncronos transmiten junto, con el mensaje, una seal de reloj
con lo cual consiguen que, en todo momento, el transmisor y el
receptor estn exactamente sincro-nizados. Esta tcnica permite
el envo de mensajes muy largos y un tanto por ciento de datos
enviados sin problemas de sin-cronizacin muy alto. Sin embargo
para mensajes cortos no es aconsejable su uso ya que el tiempo
de sincronizacin inicial es alto y la eficiencia se reduce al
TELECONTROL DE REDES ELCTRICAS
77
necesitar varios bits para la sincronizacin. Existen en la
literatura [CHOU-90] distintos modelos para sincronizar redes
asncronas
sin
aumentar
exce-sivamente
el
coste
la
complejidad de los mensajes enviados.
Los modems utilizados en los sistemas de control requieren
el uso de canales de comunicacin de calidad telefnica como
mnimo. Para ello se podran utilizar las redes pblicas de
comunicacin, sin embargo, las empresas elctricas poseen redes
privadas
basndose
naturaleza
del
disponibilidad
superiores
en
servicio
exigidas
las
distintas
que
razones
elctrico,
los
puede
canales
ofrecer
una
[GONZ-93]:
la
de
dada
la
seguridad
comunicacin
son
empresa
pblica
de
telecomunicacin; en condiciones de emergencia, ya sean por
causas naturales (inundaciones, terremotos, etc.) o provocadas
(huelgas, sabotajes, etc.) las empresas elctricas no pueden
estar a expensas slo del servicio prestado por otras compaas
de servicios, que a su vez pueden estar sobrecargadas por los
mismos motivos; tambin existen razones de tipo econmico ya
que una empresa pblica no puede satisfacer de manera efectiva
las necesidades de comunicacin especficas de las empresas
elctricas ni en los emplazamientos donde sta los requiere;
por ltimo el ambiente elctrico y magntico existente en las
subestaciones hace que aparezcan problemas relacionados con la
compatibilidad
electromagntica
de
los
elementos
de
comunicacin, los cuales pueden ocasionarles averas costosas y
prdidas del servicio a la empresa pblica de telecomunicacin,
no contempladas en las tarifas actuales.
TELECONTROL DE REDES ELCTRICAS
78
Tambin existen en las redes privadas de las compaas
elctricas enlaces digitales que conviven con los enlaces de
tipo
analgico.
Sin
embargo
la
tendencia
se
muestra
irreversible hacia la digitalizacin de los enlaces primero y
hacia la Red Digital de Servicios Integrados, RDSI, despus ya
que son muchas las ventajas que presentan: permiten transmitir
cualquier tipo de seal en una nica red, son ms flexibles y
ms
baratas,
ofrecen
ms
prestaciones,
son
ms
fciles
de
mantener y permiten la supervisin y control de la red de
comunicaciones desde un centro de control.
Hasta aqu hemos visto las distintas configuraciones que
pueden
tomar
los
medios
de
comunicacin
qu
elemento
transmite esa informacin de un extremo a otro del canal. Sin
embargo an nos quedan algunos aspectos por determinar como
son: cmo se forman y qu criterios siguen los mensajes que se
envan y a travs de qu medios se pueden enviar esos mensajes.
Estos dos aspectos los veremos en los dos apartados siguientes.
2.3.1.- PROTOCOLOS
Se entiende por protocolo de comunicacin al conjunto de
reglas y convenios preestablecidos, que tanto el transmisor
como el receptor deben conocer, para hacer posible el trasvase
de
informacin
entre
ordenadores.
Por
ello
los
protocolos
definen el formato y la estructura de los mensajes que se
intercambian.
TELECONTROL DE REDES ELCTRICAS
79
La configuracin de los primeros sistemas SCADA era bsicamente de hardware y por tanto los mensajes de transmisin se
basaban en rels lgicos o en contactos abiertos/cerrados. Por
ello la primera aplicacin de los microprocesadores utilizaba
una estructura en los mensajes que simulaban estos sistemas y
los primeros protocolos enviaban la informacin bit a bit con
un pequeo tiempo de separacin entre cada uno de ellos. A este
tipo
de
protocolos
orientados
al
bit
se
y
les
son
dio
muchos
el
nombre
todava
de
los
protocolos
protocolos
de
telecontrol que utilizan esta tcnica.
Con la intencin de reducir la carga de los sistemas de
comunicacin y aprovechar al mximo las ventajas de los microprocesadores
se
desarrollaron
los
protocolos
orientados
al
byte. En ellos se transmite palabras de ocho bits, cada una de
ellas con un bit de comienzo y otro de final, con un nico
tiempo
de
separacin
entre
cada
palabra
byte.
Estos
protocolos tambin estn muy extendidos entre los protocolos de
telecontrol, sobre todo cuando se les permiti que la longitud
de los mensajes enviados fueran variables, para ello en los
primeros bytes del mensaje se indica qu longitud tiene ste.
La
transmisin
de
la
informacin
entre
el
centro
de
control y las unidades remotas, en ambas direcciones, deben
llevarse
cabo
[GAUS-91]
travs
de
mensajes
eficientes,
seguros, flexibles y que sean implementados fcilmente tanto en
hardware
como
en
software.
La
eficiencia
nos
mide
qu
TELECONTROL DE REDES ELCTRICAS
proporcin
del
mensaje
80
total
se
dedica
transmitir
informacin, por ello debemos aprovechar al mximo la capacidad
del
mensaje
para
enviar
informacin.
La
seguridad
es
la
capacidad de un protocolo de detectar errores en la informacin
original
transmitida,
existente
en
representa
los
la
general-mente
canales
de
posibilidad
causada
por
comu-nicacin.
de
enviar,
el
La
desde
"ruido"
flexibilidad
el
centro
de
control, distintas cantidades y tipos de mensajes. Por ltimo,
la
implementacin
mnimo
de
lgica,
en
hardware
almacenamiento
software
de
requiere
memoria
usar
el
velocidad
de
operacin.
Todos
los
mensajes
estn
divididos
[ANSI-87]
en
tres
partes:
- Establecimiento del mensaje: en esta parte se incluye la
seal de sincronizacin entre el receptor y el transmisor.
- Informacin: aqu se encuentran los datos que se quieren
enviar en un formato codificado de manera que el receptor los
pueda decodificar y utilizarlos adecuadamente.
- Terminacin del mensaje: en este ltimo bloque aparecen
los bits de seguridad y las marcas que indican el fin del
mensaje. Los bits de seguridad se obtienen tras operar los
datos del mensaje con un nmero prefijado. El receptor realiza
las mismas operaciones que hizo el transmisor y obtiene sus
propios
bits
de
seguridad,
comprueba
estos
bits
con
los
transmitidos en el mensaje, si son los mismos acepta el mensaje
como bueno, por el contrario si son distintos se solicita la
retransmisin del mensaje.
TELECONTROL DE REDES ELCTRICAS
81
Fig. 30 : Formato de un mensaje asncrono tpico.
En la Fig. 30 mostramos el formato tpico de un mensaje
asncrono orientado al bit. En este caso el apartado dedicado
al establecimiento del mensaje est compuesto de dos partes: la
primera parte consiste en dos bits que le indican al receptor
el instante a partir del cual debe comenzar la decodificacin y
la segunda en cuatro bits ms que sealan qu RTU enva el
mensaje o a qu RTU se quiere enviar.
El campo dedicado a la informacin contiene 20 bits, de
los cuales 8 bits son para indicar el cdigo de la funcin a
realizar y los 12 restantes para datos. En los mensajes que la
remota enva al centro de control, para enviar datos, este
reparto de bits ocurre slo en el primer mensaje, a partir del
segundo mensaje, que se enva directamente detrs del primero,
los datos ocupan tambin el espacio reservado a la direccin de
la RTU y al cdigo de la funcin, de manera que en total se
dispone de 24 bits de datos para transmitir, lo cual representa
24 posiciones de estado o dos valores numricos de 12 bits cada
uno.
TELECONTROL DE REDES ELCTRICAS
82
Fig. 31 : Estructura del mensaje de adquisicin de datos.
En la Fig. 31 se puede ver la estructura de los mensajes
en este caso: primero el centro de control solicita, a travs
del
"cdigo
indicndole
de
funcin",
tambin,
en
la
informacin
"identificacin
de
a
los
la
remota,
datos",
la
cantidad y el tipo de los datos solicitados; a continuacin la
remota
le
enva
dicha
informacin
con
el
formato
arriba
expuesto. En esta figura slo se ha representado el campo de
informacin.
En los mensajes que el centro de control enva a las
remotas la informacin transmitida se trata, generalmente, de
rdenes de control sobre los distintos dispositivos de la red
elctrica.
Por
ello
activar/desactivar
un
debido
tambin
dispositivo
al
riesgo
equivocado
que
supone
recibir
un
mensaje de control errneo, es por lo que se toman medidas de
seguridad
adicionales
secuencia
de
ejecucin".
mensajes,
consistentes,
llamada
de
bsicamente,
"seleccin
en
una
antes
de
TELECONTROL DE REDES ELCTRICAS
83
Fig. 32 : Secuencia de mensajes para el control de dispositivos en la
remota.
En esta secuencia de mensajes, ver Fig. 32, primero el
centro
de
control
selecciona
el
dispositivo
de
control
manejar, segundo la remota en cuestin enva un mensaje de
comprobacin, en ambos casos se aade un valor numrico para
ser aceptado por la RTU, tercero el centro de control enva ya
un mensaje de ejecucin y cuarto y ltimo la remota responde
con un mensaje de confirmacin que indica que la operacin se
ha llevado a cabo. Este tipo de seguridad "extra" se aplica
slo
en
los
casos
que
resultan
imprescindibles
ya
que
en
algunos dispositivos no seran necesarios como ocurre en los
generadores de potencia, ya que cualquier error, solicitando
mayor
menor
produccin
de
corriente
de
la
debida,
es
rpidamente corregida por la funcin del control automtico de
TELECONTROL DE REDES ELCTRICAS
84
la generacin AGC, por ello slo se enva el primero de los
cuatro mensajes antes indicados.
Por ltimo el campo de terminacin del mensaje contiene
los bits de seguridad y el bit que indica el fin del mensaje.
Existen muchos cdigos detectores de errores, como la simple
comprobacin
de
la
paridad
hemos utilizado el cdigo
del
mensaje.
En
nuestro
ejemplo
de redundancia cclica CRC28 en el
cual se colocan los bits que quedan de resto despus de dividir
el bloque de datos por un polinomio preestablecido. En este
caso el mensaje se divide en dos partes, una fija, que contiene
los caracteres de cabecera, y la otra con el bloque de datos
que se transmite. El cdigo CRC se aplica por separado a cada
una de esas partes aadindose los bits obtenidos a cada una de
ellas. Existen distintos cdigos CRC aunque el ms utilizado es
el CRC-CCITT. Segn [TANE-91] este cdigo es capaz de detectar
todos los errores simples y dobles, todos los errores con un
nmero
impar
de
bits,
todos
los
errores
de
rfaga
con
longitudes de 16 o menos bits, el 99,997% de los errores de
rfaga de 17 bits y el 99,998% de los errores de rfaga de 18
bits o ms.
En el ejemplo de estructura de mensaje que hemos visto el
total de bits utilizados es de 32, por tanto la eficiencia del
protocolo en la comunicacin de la remota al centro de control
sern, en una primera aproximacin, de 12 sobre 32 lo que
28
Del ingls : CRC = Cyclical redundancy computation.
TELECONTROL DE REDES ELCTRICAS
85
representa el 37,5% para el primer mensaje y de 24 sobre 32
para los restantes, lo cual aumenta la eficiencia hasta el 75%,
valor que es normal para este tipo de protocolos.
Hasta aqu hemos hablado de protocolos entre centros de
control y remotas, sin embargo no son los nicos que aparecen
en los sistemas de control. La creciente complejidad de los
sistemas elctricos y la necesidad de operar cada vez con ms
seguridad y economa, conceptos opuestos, ha motivado que desde
hace dcadas las empresas de un mismo pas funcionen conectadas
entre s y con las de los pases vecinos. Esto ha llevado a la
elaboracin
de
protocolos
[HEGG-91],
[AMBR-91],
etc.,
entre
centros de control, los cuales intercambian informacin entre
ellos mantenindose constantemente informados de los cambios
producidos en cada una de las redes elctricas conectadas.
Existe un gran nmero de protocolos diferentes actualmente
en servicio, incluso dentro de un mismo sistema SCADA. Algunos
de estos protocolos se estudian en profundidad en [PERE-92]. A
pesar de los grandes esfuerzos que se han hecho para poder
trabajar simultneamente con ellos, mediante conversin [CUP92] de unos en otros, la tendencia actual es la de desarrollar
un
protocolo
estndar
que
sea
compatible
con
cualquier
fabricante. Esta tendencia se ver culminada, si alguna vez se
consigue, a muy largo plazo, ya que los intereses estratgicos
de
los
fabricantes
amortizar
los
como
sistemas
la
necesidad
existentes
no
de
los
hacen
consecucin, al menos, en los prximos diez aos.
usuarios
de
previsible
su
TELECONTROL DE REDES ELCTRICAS
86
Un primer paso hacia la obtencin de ese estndar ocurri
en el ao 1984 en donde la organizacin ISO29 present su modelo
de referencia OSI30 [ISO-84], [ISO-84]b y [ISO-84]c, el modelo
de referencia para la interconexin de sistemas abiertos. No se
trata de un protocolo, sino que aporta la estructura y los
criterios que deben regir en la elaboracin y descripcin de
protocolos.
Este
modelo,
basndose
en
los
principios
que
el
ao
anterior haban elaborado Day y Zimmermann [DAY-83], consta de
siete niveles o capas:
- La arquitectura de este modelo debe permitir el uso de
muy diversos medios fsicos con diferentes procedimientos de
control, es por ello que el nivel inferior de la arquitectura
debe ser el nivel fsico.
-
Por
encima
del
nivel
fsico
se
hace
necesario
la
presencia de un nivel de enlace, ya que algunos medios fsicos
de
comunicacin
transmitir
datos
requieren
entre
tcnicas
sistemas
especficas
con
un
margen
para
poder
de
error
aceptable.
- Hay ocasiones en que al comunicarse dos sistemas entre
s
29
30
ISO = International Standards Organization.
OSI = Open Systems Interconnection.
TELECONTROL DE REDES ELCTRICAS
87
Fig. 33 : Modelo de referencia OSI.
a travs de una red, los mensajes que se intercambian pueden
atravesar nodos intermedios establecindose rutas alternativas.
Por ello, se hace necesario establecer un nuevo nivel, superior
al nivel de enlace, que tome la tarea de elegir la ruta a
seguir de los datos. Este ser el nivel de red.
- Otro nivel superior al de red ser aquel que se encargue
de controlar el transporte de los datos entre transmisor y
receptor sin tenerse que preocupar de los nodos intermedios ni
TELECONTROL DE REDES ELCTRICAS
de
las
rutas
88
alternativas.
Tendremos
pues
el
nivel
de
transporte.
- El siguiente nivel ser el nivel de sesin, como consecuencia de la necesidad de organizar y sincronizar el dilogo
entre ambos sistemas.
- Todo aquello que est relacionado con el manejo, intercambio de datos y su representacin, forman un conjunto muy
amplio de funciones de inters general de las que se encarga el
nivel de presentacin.
- Por ltimo, en lo ms alto de esta arquitectura se
encuentra el nivel de aplicacin, que se encarga directamente
de las funciones relacionadas con los procesos de aplicacin y
de procesado de la informacin.
Esta estructura en niveles o capas permite que cada una de
ellas slo tenga en cuenta a la inmediata superior e inferior,
as cada nivel proporciona un conjunto de servicios al nivel
inmediato superior. Este sistema es muy conveniente ya que si
deseamos
alterar
un
nivel
determinado
podemos
hacerlo
manteniendo los servicios que presta y recibe de los niveles
vecinos.
Tambin
aparece,
en
este
modelo
de
referencia,
el
concepto de protocolo de nivel, consiste en suponer que cada
nivel
del
transmisor
"habla"
directamente
con
el
nivel
equivalente del receptor y por ello las reglas a determinar son
entre ellos aunque en la realidad esa informacin descienda
nivel a nivel hasta alcanzar el nivel 1 a travs del cual se
produce la transmisin real de los bits del mensaje. A medida
que desciende hacia el nivel fsico se le van aadiendo unas
TELECONTROL DE REDES ELCTRICAS
89
cabeceras propias de cada nivel, las cuales informan al nivel
correspondiente del receptor lo que debe realizar con aquella
cadena
de
receptor
bits.
esas
informacin
Ascendiendo
cabeceras
enviada
se
por
van
los
distintos
desapareciendo
almacena
en
la
niveles
hasta
memoria
del
que
del
la
segundo
ordenador. Ver Fig. 34.
Fig. 34 : Transmisin de datos en el modelo de referencia OSI.
A pesar de los esfuerzos realizados con este modelo de
referencia
an
queda
mucho
tiempo,
por
las
razones
que
ya
vimos, para conseguir desarrollar un protocolo estndar para el
control de redes elctricas aceptado por todos. Sin embargo
todos estn de acuerdo en el gran paso que dicho modelo ha
representado,
ya
que
define
el
concepto
de
estructura
por
TELECONTROL DE REDES ELCTRICAS
90
niveles en trminos de servicio, funciones y protocolos; da una
definicin precisa de cada funcin a realizar por los distintos
niveles, sin dar necesariamente detalles de cmo se consigue
esa funcionalidad; identifica el conjunto de funciones que son
fundamentales
para
proporcionar
comunicaciones
fiables,
seguras, transparentes y econmicas entre sistemas y sobre todo
porque ha modificado el modo en que la industria operaba en el
diseo
de
productos
en
la
cooperacin
con
socios,
competidores y usuarios.
2.3.2.- DISTINTOS MEDIOS DE COMUNICACIN
Existen muchos medios de comunicacin diferentes, desde
lneas
telefnicas,
ptica,
satlite,
microondas,
etc.
Cada
radioenlaces
uno
de
hasta
ellos
ofrece
fibra
unas
caractersticas especficas y una relacin precio/prestaciones
determinadas que deben tenerse en cuenta a la hora de llevarse
a
cabo
un
nuevo
enlace
de
comunicacin.
Los
sistemas
de
comunicacin suelen utilizar varios de estos medios dentro de
un
mismo
sistema
de
control,
utilizando
entre
ellos
los
convertidores adecuados, y slo en los sistemas de comunicacin
ms simples aparece un nico medio de comunicacin.
Aparte de la calidad que pueda ofrecer un canal de comunicacin determinado existe una caracterstica del mismo que es
bsica para saber qu velocidad de transmisin de datos es
capaz de soportar, es lo que
se
conoce
como
su
"ancho
de
banda". Es sabido que ningn medio de comunicacin es capaz de
TELECONTROL DE REDES ELCTRICAS
91
efectuar la transmisin de seales sin perder potencia en ese
proceso. Si descomponemos la seal en sus distintos armnicos,
segn
la
serie
armnicos
disminucin
se
en
de
Fourier,
atenan
se
observa
igualmente,
amplitud
no
lo
que
cual
distorsin
de
no
todos
implicara
la
los
slo
seal.
Los
primeros armnicos, hasta un valor de la frecuencia fc, no se
degradan mientras que los dems aparecen fuertemente atenuados.
Este valor de la frecuencia fc a partir del cual se atenan los
armnicos de la seal se le conoce como ancho de banda. En
algunos casos este ancho de banda de un canal de comunicacin
es una propiedad fsica del mismo, mientras que en otros casos,
este efecto, se introduce artificialmente mediante un filtro
con el objetivo de limitar el ancho de banda disponible para
cada usuario.
En la Tab. 4, tomada de [TANE-91], mostramos, para un
canal de comunicacin de calidad telefnica, con un ancho de
banda
aproximado
de
3000
Hz
para
las
velocidades
de
transmisin de datos ms usuales, el tiempo de transmisin de 8
bits, la frecuencia a la que se presenta el primer armnico y
el
nmero
de
armnicos
enviados.
La
precisin
de
la
seal
recibida depender del nmero de armnicos enviados, ya que a
mayor nmero de ellos ms sumandos aparecen en la serie de
Fourier correspondiente. Por ello es obvio que para velocidades
superiores a los 38.4 Kbps no hay seguridad de recibir la seal
binaria, aunque el canal est totalmente libre de ruido. Por
tanto la restriccin del ancho de banda limita la velocidad de
envo
de
los
datos,
incluso
en
canales
de
transmisin
TELECONTROL DE REDES ELCTRICAS
92
perfectos. Sin embargo, utilizando sistemas ms sofisticados de
codificacin, en los que se utilizan varios niveles de tensin,
se puede conseguir velocidades de transmisin superiores.
Tab. 4 : Caractersticas resultantes para un canal de
calidad telefnica y ancho de banda aproximado de 3000 Hz.
comunicacin
de
Velocidad
Periodo
Primer
N de armnicos
bps
T (ms)
armnico (Hz)
enviados
-----------------------------------------------------------300
26.67
37.5
80
600
13.33
75
40
1200
6.67
150
20
2400
3.33
300
10
4800
1.67
600
5
9600
0.83
1200
2
19200
0.42
2400
1
38400
0.21
4800
0
------------------------------------------------------------
Por
desarrollo
todo
de
ello,
los
en
la
sistemas
actualidad,
de
se
investiga
telecomunicacin
en
el
dos
direcciones divergentes: por un lado, se buscan medios con un
ancho de banda mayor, y por otro lado, se pretenden obtener
nuevas
tecnologas
que
permitan
usar
ms
eficientemente
la
capacidad del canal. Ambas lneas de trabajo coincidirn en una
optimizacin de los recursos y en una mayor flexibilidad a la
hora de disear o modificar cualquier red para conseguir los
requisitos especficos deseados.
Con el fin
de
comprender
utilizar
adecuadamente
los
sistemas de comunicacin de un sistema de control, es necesario
TELECONTROL DE REDES ELCTRICAS
93
conocer el amplio abanico de posibilidades que los medios de
comunicacin presentan. Por ello, en los prximos apartados
vamos a ver, con un poco ms de detalle, algunos de estos
medios de comunicacin, destacando en cada uno de ellos sus
ventajas e inconvenientes [GAUS-91].
2.3.2.1.- PAR TRENZADO
Es el medio de comunicacin ms antiguo y an hoy da es
uno de los ms utilizados. Consiste en dos alambres de cobre
aislados, en general de 1 mm de espesor. Ambos alambres se
entrelazan
en
forma
helicoidal,
lo
cual
le
va
permitir
reducir la interferencia elctrica con pares vecinos. Una de
sus
principales
nuevas
ventajas
tecnologas
ya
radica
que
su
en
que
no
necesita
funcionamiento
se
aplicar
basa
en
conceptos elctricos ampliamente difundidos.
Su principal aplicacin
es
el
sistema
telefnico
la
distancia que se puede recorrer, sin necesidad de amplificar
las seales, es de varios kilmetros, entre 10 y 15 Km. Se
pueden utilizar tanto para transmisin analgica como digital y
su ancho de banda depender del calibre del alambre y de la
distancia a recorrer, en general no excede los 4 KHz. En muchos
casos se pueden obtener transmisiones de varios megabits/s en
distancias de pocos kilmetros.
2.3.2.2.- CABLE COAXIAL
TELECONTROL DE REDES ELCTRICAS
El cable coaxial
es
94
otro
medio
tpico
de
transmisin.
Consta de un alambre de cobre duro en su parte central, lo que
constituye
material
rodeado
el
ncleo,
aislante.
por
un
el
Este
cual
se
material
encuentra
conductor
aislante,
cilndrico
que
rodeado
a
su
por
vez,
un
est
frecuentemente
se
presenta como una malla de tejido trenzado. Por ltimo este
conductor cilndrico est cubierto por una capa de plstico
protector. Esta estructura del cable coaxial produce una buena
combinacin
de
un
gran
ancho
de
banda
con
una
excelente
inmunidad al ruido.
Hay dos tipos de cables coaxiales que se utilizan con
frecuencia:
el
cable
de
50
ohm.,
que
se
utiliza
para
la
transmisin digital y el cable de 75 ohm. que se emplea en la
transmisin analgica. El ancho de banda que ofrece un cable
coaxial depender de la longitud que ste tenga y ser mayor a
medida que ste sea ms corto. Para distancia cortas se pueden
conseguir velocidades de transmisin de hasta 10 Mbps.
Se suele utilizar en sustitucin de los cables de par
trenzado, dado su mayor ancho de banda, y tambin dentro del
cable de tierra de las lneas de alta tensin en distancias de
hasta 30 Km, lo cual proporciona una capacidad mxima de 24
canales analgicos de 4 KHz. Para seales digitales y para
distancias inferiores al kilmetro permite enviar seales hasta
a 34 Mbps.
2.3.2.3.- EQUIPOS DE ONDA PORTADORA
TELECONTROL DE REDES ELCTRICAS
95
Utilizan la lnea de transmisin de energa como medio
fsico de comunicaciones. Se les conoce en la literatura como
equipos PLC31. Dado que las frecuencias del canal analgico,
entre 300 y 3400 Hz de banda til, estn muy prximas a los 50
Hz
de
la
seal
elctrica,
ste
no
permite
su
transmisin
directa y por tanto hay que trasladar la seal, mediante una
modulacin adecuada, a una banda de frecuencia que cumpla los
requisitos
siguientes:
frecuencia
de
50
Hz,
estar
no
suficientemente
perturbar
separada
otros
de
la
servicios
de
telecomunicacin y no presentar excesiva atenuacin que impida
la comunicacin a ciertas distancias.
La banda escogida est en el rango entre 30 y 490 KHz, si
bien cada pas tiene distintas legislaciones que modifican o
limitan el uso de la banda y el alcance puede llegar a varios
centenares
de
kilmetros,
sin
repetidores,
dependiendo
del
nivel de tensin de la lnea y la frecuencia utilizada. Para
sistemas SCADA los PLC pueden proporcionar canales que trabajen
a
2400
negativo
bps
utilizando
podemos
modems
indicar
que
convencionales.
son
bastantes
En
el
sensibles
lado
a
los
cambios en el tiempo, en especial a las tormentas de nieve que
acentan
cambios
la
atenuacin
dinmicos
de
de
la
seal.
Otros
impedancia,
factores
operaciones
como,
de
conexin/desconexin, rayos, etc., pueden afectar seriamente a
la seal aadindole ruido.
31
Del ingls: PLC = Power Line Carrier.
TELECONTROL DE REDES ELCTRICAS
96
2.3.2.4.- FIBRA PTICA
Recientes desarrollos en el campo de la tecnologa ptica
han permitido la transmisin de informacin mediante pulsos de
luz, de manera que un pulso indicar un bit de valor 1 y la
ausencia de ese pulso indicar un bit de valor 0. El hecho de
que la luz visible tenga una frecuencia de alrededor de 108 MHz
lo convierte un sistema de transmisin de ancho de banda enorme
y por lo tanto de gran inters.
El principio fsico en el cual se basan estos enlaces de
fibra ptica es aquel que se observa al refractarse un rayo de
luz que pasa de un medio fsico a otro de menor ndice de
refraccin. Para determinados ngulos de incidencia, superiores
a un valor determinado, el rayo de luz se refleja totalmente en
la
superficie
de
separacin
entre
ambos
medios,
quedando
atrapado en el medio de mayor ndice de refraccin. En nuestro
caso ese medio lo proporciona la fibra ptica.
Todo sistema de comunicacin de fibra ptica est formado
por tres componentes bsicos: transmisor, que es un convertidor
de seales elctricas en seales luminosas como son el lser o
un LED, conductor de fibra ptica, una fibra muy larga de
cristal o plstico muy puros que conecta el transmisor con el
receptor y receptor, que es otro convertidor, ahora de seales
luminosas en seales elctricas. Adems de todo esto existen
tambin, a lo largo de la lnea, repetidores de la seal que la
convierten en seal elctrica, la amplifican, y la vuelven a
convertir en seal luminosa.
TELECONTROL DE REDES ELCTRICAS
97
En una misma fibra puede haber varios rayos diferentes
rebotando a distintos ngulos. A sta situacin se le conoce
como fibra "multimodo". Por el contrario si el dimetro de la
fibra se reduce drsticamente al valor de la longitud de onda
de
la
luz,
entonces
sta
se
propaga
en
lnea
recta,
rebotar, produ-cindose as una "fibra de un slo modo".
fibras
de
un
solo
modo
necesitan
diodos
lser
para
sin
Las
su
excitacin, los cuales tienen precios elevados, sin embargo
aseguran
una
mayor
eficiencia
permiten
utilizarse
en
distancias muy largas. Estos sistemas son capaces de transmitir
datos a 1000 Mbps a distancias de 1 Km. Con lseres potentes se
pueden
excitar
fibras
pticas
de
100
Km
sin
utilizar
repetidores, aunque naturalmente a velocidades ms bajas.
Una de las ventajas ms importantes que presentan esta
fibra
ptica
es
su
total
inmunidad
las
interferencias
electro-magnticas que una subestacin o una central generadora
puedan presentar. Por ello la fibra ptica se puede tender por
los mismos caminos que las lneas de transmisin y distribucin
de la red elctrica. Por el contrario tambin presentan algunos
inconvenientes,
especiales
as,
un
por
ejemplo,
personal
se
cualificado
necesita
conectores
para
montaje
su
reparacin. Para distancias muy cortas no es adecuado su uso ya
que la necesidad de incluir el transmisor y el receptor puede
hacerlo excesivamente caro frente a otros medios ms simples,
como
el
par
trenzado
el
cable
coaxial.
Por
ltimo,
la
necesidad de incluir, con cierta frecuencia, repetidores a lo
TELECONTROL DE REDES ELCTRICAS
98
largo del camino tambin representa un inconveniente.
2.3.2.5.- RADIO FRECUENCIA
Hasta ahora el medio fsico por el cual se produca el
transporte de la informacin era un cable de cobre o de fibra.
En este apartado veremos a aquellos medios que utilizan el aire
como medio de transporte, son los medios de comunicacin por
radio frecuencia. Hace ya ms de 40 aos que las empresas
elctricas
se
decidieron
utilizar
este
tipo
de
medio
de
comunicacin. En sus comienzos utilizaban la banda HF32 para
posteriormente pasarse a las bandas VHF33, UHF34, SHF35 y EHF36
progresivamente. De todas ellas las que se encuentran alrededor
de
los
500
MHz,
que
se
les
conoce
como
transmisin
por
microondas, son las ms ampliamente utilizadas.
Este tipo de enlace presenta muchas ventajas: el ancho de
banda es ms que suficiente para las necesidades de un sistema
de control; es ms fcil y econmico construir dos torres de
comunicacin de 100 m de altura cada una que enlazar esos dos
32
33
34
35
36
HF = High Frequency, (3 - 30 MHz).
VHF = Very High Frequency, (30 - 300 MHz).
UHF = Ultra High Frequency, (0.3 - 3 GHz).
SHF = Super High Frequency, (3 - 30 GHz).
EHF = Extremely High Frequency, (30 - 300 GHz).
TELECONTROL DE REDES ELCTRICAS
99
mismos puntos mediante un cable enterrado en el suelo de 100 Km
de longitud; adems se puede utilizar tanto para conexiones
punto a punto como de cualquier otro tipo.
En cuanto a sus desventajas, que tambin las tiene, se
encuentran:
la
oportuna,
lo
saturadas
de
necesidad
cual
no
de
obtener
siempre
comunicaciones;
es
la
la
licencia
fcil
de
sobretodo
necesidad
de
emisin
en
zonas
colocar
el
transmisor y el receptor en lnea directa sin obstculos de
ningn tipo que le impidan la conexin, lo cual implica en
zonas montaosa la presencia de repetidores a lo largo del
camino; o el hecho de que las seales de una antena pueden
dividirse
propagarse,
siguiendo
trayectorias
ligeramente
diferentes, por lo tanto al recombinarse en la antena receptora
puede haber interferencias entre ellas de manera que se reduzca
la intensidad de la seal.
2.3.2.6.- SATLITE DE COMUNICACIN
Cuando
telecontrol
alternativo,
el
es
territorio
muy
amplio
a
este
econ-micamente
cubrir
por
sistema
rentable.
el
puede
sistema
ser
Este
un
tipo
de
medio
de
comunicacin se puede imaginar como si un enorme repetidor de
microondas estuviera instalado en el cielo. Est constituido
por uno o varios dispositivos receptor-transmisor denominado
"transponders", de manera que cada uno de ellos est atento a
una parte del espectro, tras su amplificacin la retransmite a
una frecuencia distinta a la que lleg, con el fin de evitar
TELECONTROL DE REDES ELCTRICAS
las
interferencias
con
las
100
seales
de
entrada.
Una
de
las
ventajas que este sistema presenta es la capacidad que posee de
cubrir amplias zonas de la superficie de la Tierra o en el caso
de flujos muy estrechos, cubrir zonas de cientos de kilmetros
de dimetro.
Un satlite tpico posee un ancho de banda de 500 MHz que
lo
divide,
aproximadamente,
en
doce
receptores-transmisores,
cada uno de ellos con un ancho de banda de 36 MHz, lo cual
permite un flujo de informacin de 50 Mbps. El tiempo que se
emplea en enviar el contenido de una cinta magntica por una
lnea telefnica a 56 Kbps es de siete horas, en el caso del
satlite, a 50 Mbps, ser de 30 s solamente. Otra comparacin
interesante es con la fibra ptica.
Su principal desventaja se encuentra en el excesivo coste
que implica y en la inversin que representa. Adems estos
canales de comunicacin, dadas las distancias a recorrer por la
seal, presentan cierto retraso en su propagacin lo cual no es
aceptable para algunas operaciones que requieren alta velocidad
de transmisin, como pueden ser algunas rdenes de control. A
pesar de esto, el desarrollo de estos sistemas en el futuro, la
correspondiente
empresas
para
disminucin
su
uso
de
costes
provocar,
unin
previsiblemente,
utilizacin de los mismos que hoy en da.
BIBLIOGRAFA
la
de
un
varias
mayor
TELECONTROL DE REDES ELCTRICAS
[AMBR-91]
D.R. Ambrose. "Inter-utility communications within
Trans. on Pow. Syst., vol. 6, n4, pg. 1345. Nov., 1991.
101
WSCC".
[AMEL-91]
H. Amelink, G.K. Beck, G.J. Crask y R.E. Olsen. "Master station
architecture".
IEEE
Tutorial
course.
Fundamentals
of
supervisory systems, pg. 57. 1991.
[ANSI-87]
American
National
Standards
Institute.
"IEEE
Standard
definition, specification, and analysis of systems used for
supervisory control, data acquisition and automatic control".
ANSI/IEEE C37.1
1987.
[BLOC-91]
W.R. Block, F.M. Cleveland, R.J. Farquharson, R. Maraio y S.C.
Sciacca. "Advanced SCADA concepts". IEEE Tutorial course.
Fundamentals of supervisory systems, pg. 109. 1991.
[BLOC-91]B
W.R. Block, J.W. Evans, F.W. Greenway y H.L. Smith. "Remote
terminal
units".
IEEE
Tutorial
course.
Fundamentals
of
supervisory systems, pg. 25. 1991.
[BLYN-77]
M.S. Blynn y J.N. Boucher. "The computer subsystems". IEEE
Tutorial course. Energy control center design, pg. 48. 1977.
[CHIH-90]
L. Chih-Chien. "An overview of the hierarchical dispatch and
control system in taipower". IEEE Trans. on Pow. Syst., vol 5,
n4, pg. 1041. Nov., 1990.
[CHOU-90]
C.T. Chou, I. Cidon, I.S. Gopal y S. Zaks. "Synchronizing
asynchronous bounded delay networks". IEEE Trans. on Comm.,
vol.38, n2, pg.144. Feb., 1990.
[CLEM-73]
K.A. Clements, O.J. Denison y R.J. Ringlee. "The effects of
measurement non-simultaneity, bias, and parameter uncertainty
on power system state estimation". PICA Conference proceeding.
IEEE Publication n 73CH0740-IPWR, pg. 327. 1973.
[CUP-92]
DPTO.
TECNOLOGA
ELECTRNICA.
"Convertidor
Universal
Protocolos de Telecontrol" PIE n 132.181, Oct., 1992
de
[DAMO-91]
P.R. D'Amour, R.L. Kreger, W.W. Soper y T. Watson. "Man-machine
interface". IEEE Tutorial course. Fundamentals of supervisory
TELECONTROL DE REDES ELCTRICAS
102
systems, pg. 73. 1991.
[DAY-83]
Day y H. Zimmermann. "The OSI reference model". Proc. of the
IEEE, vol. 71, pg. 1334. Dic., 1983.
[DEME-77]
F.P. de Mello y J.M. Undrill. "Automatic generation control".
IEEE Tutorial course. Energy control center design, pg. 17.
1977.
[DOPA-77]
J.F. Dopazo. "Power system security". IEEE Tutorial course.
Energy control center design, pg. 37. 1977.
[DYLI-77]
T.E. Dy Liacco. "An overview of power system control centers".
IEEE Tutorial course. Energy control center design, pg. 5.
1977.
[EVAN-91]
J.W. Evans. "Considerations in applying supervisory control and
data acquisition systems to electric utility stations". IEEE
Tutorial course. Fundamentals of supervisory systems, pg. 15.
1991.
[FERR-90]
D. Ferrari. "Client requirements for real-time communication
services". IEEE Commun. Mag, pg. 65. Nov., 1990.
[FRAN-77]
D.G. Franz. "Energy control center data acquisition and
communications subsystem". IEEE Tutorial course. Energy control
center design, pg. 63. 1977.
[GAUS-91]
D.J. Gaushell y J.H. Nolan. "Telecommunication Options". IEEE
Tutorial course. Fundamentals of supervisory systems, pg. 35.
1991.
[GONZ-93]
F. Gonzalo. "Las comunicaciones en los sistemas de telecontrol
en redes elctricas: Aplicacin de tcnicas formales de
especificacin". Tesis doctoral Universidad de Sevilla. Feb,
1993
[HEGG-91]
J. Hegge y A. Larsen. "The ELCOM utility communication
concept". Trans. on Pow. Syst., vol. 6, n4, pg. 1411. Nov.,
1991.
[IEEE-70]
American
National
Standard
Institute.
"Definitions
for
terminology for automatic generation control on electric power
systems". IEEE Trans. on Pow. App. and Syst. vol. PAS-89, pg.
TELECONTROL DE REDES ELCTRICAS
103
1358. 1970.
[ISO-84]
ISO 7498-1984(E). "Information processing systems systems interconnection - basic reference model". 1984.
[ISO-84]B
ISO 7489-2-1984(E). "Information
systems interconnection - basic
Security architecture". 1984.
Open
processing systems - Open
reference model. Part. 2:
[ISO-84]C
ISO 7489-3-1984(E). "Information processing systems - Open
systems interconnection - basic refernce model. Part. 3: Naming
and addressing". 1984.
[JALE-92]
N.Jaleeli, L.S. VanSlyck, D.N. Ewart, L.H. Fink y
Hoffmann. "Understanding automatic generation control".
Trans. on Pow. Syst., vol 7, n 3, pg. 1106. Ago., 1992.
A.G.
IEEE
[KENE-77]
T.P. Kenealy. "Man/machine interface subsystem". IEEE Tutorial
course. Energy control center design, pg. 72. 1977.
[KIDN-91]
R. Kidner y A. Bose. "Effects on state estimation of time-skew
errors in inter-utility data exchange". Elec. Pow. Syst.
Research, n 22, pg. 165. 1991.
[KIM-90]
Y.H. Kim, N. Fukushima y T.E. Dy Liacco. "KEPCO's national
control center with an advanced energy management system". IEEE
Trans. on Pow. Syst., vol. 5, n 4, pg. 1084. Nov., 1990.
[LUQU-88]
J. Luque, M. Mejas y F.J. Molina. "El control por computador
de redes elctricas". Novtica, vol. XIV, n 77, pg. 53. 1988.
[MASI-85]
R.D. Masiello. "Computers in power: a welcome invaders". IEEE
Spectrum. pg. 51. Feb., 1985.
[PERE-92]
F. Prez. "La conversin de protocolos mediante el uso de
tcnicas formales de descripcin. Aplicacin al control de
redes elctricas". Tesis doctoral. Universidad de Sevilla.
1992.
[PODM-77]
R. Podmore, N.M. Peterson y K.N. Stanton. "Economic Dispatch
and scheduling". IEEE Tutorial course. Energy control center
design, pg. 28. 1977.
[TANE-91]
TELECONTROL DE REDES ELCTRICAS
A.S.
Tanenbaum.
"Redes
de
Hispanoamericana, S.A. 1991.
104
ordenadores".
Prentice-Hall
[WAHA-92]
J.P. Waha, R. Hatert y R. Degraeve. "Belgian interutility data
exchanges within operation". IEEE Trans. on Pow. Syst., vol. 7,
n1, pg. 301. Feb., 1991.
Vous aimerez peut-être aussi
- Lineas Capitulo 8Document33 pagesLineas Capitulo 8Carlos Mario LopezPas encore d'évaluation
- Nexans RVMV Rvmav 0.6-1kvDocument3 pagesNexans RVMV Rvmav 0.6-1kvMikami TeruPas encore d'évaluation
- Reglamento ElectricoDocument27 pagesReglamento Electricorash2767% (3)
- Norma DGE Alumbrado Publico Rural-Uzyozz16z8z5zhDocument7 pagesNorma DGE Alumbrado Publico Rural-Uzyozz16z8z5zhJenner Alexander Naquiche HornaPas encore d'évaluation
- Epe - Santa Fe - Etn-85 - 08-94Document22 pagesEpe - Santa Fe - Etn-85 - 08-94martinpellsPas encore d'évaluation
- E Grupos DMimeDocument14 pagesE Grupos DMimeMikami TeruPas encore d'évaluation
- Conexiones Edicion Maestro 2007 PDFDocument153 pagesConexiones Edicion Maestro 2007 PDFMikami Teru100% (2)
- Plataforma (Te-7-543)Document1 pagePlataforma (Te-7-543)Mikami TeruPas encore d'évaluation
- Semana 14 Construcciones 2013.1 PDFDocument16 pagesSemana 14 Construcciones 2013.1 PDFFerrgoPas encore d'évaluation
- PP Termas ElectricasDocument20 pagesPP Termas ElectricasJair Villanueva ArteagaPas encore d'évaluation
- Rne2006 em 010Document3 pagesRne2006 em 010alexanderPas encore d'évaluation
- Todo Sobre Los UPSDocument14 pagesTodo Sobre Los UPSjgutierrezpepePas encore d'évaluation
- SCHENEIDER IC60H Interruptores AutomaticosDocument1 pageSCHENEIDER IC60H Interruptores AutomaticosMikami TeruPas encore d'évaluation
- Designacion de Cables BT Facel GeneralDocument13 pagesDesignacion de Cables BT Facel General0BALSEPas encore d'évaluation
- Iluminación Publica OkDocument67 pagesIluminación Publica OkMikami TeruPas encore d'évaluation
- Iluminación Publica OkDocument67 pagesIluminación Publica OkMikami TeruPas encore d'évaluation
- D-COME-07 - Estabilizador LCR3F de 10 A 80KVA - Ieda PowerSafeDocument2 pagesD-COME-07 - Estabilizador LCR3F de 10 A 80KVA - Ieda PowerSafeMikami TeruPas encore d'évaluation
- Comando Motores ContactoresDocument25 pagesComando Motores ContactoresLeslie BuPas encore d'évaluation
- Reglamento ElectricoDocument27 pagesReglamento Electricorash2767% (3)
- Los Orígenes de La Lexicografía Bilingüe Español-PortuguésDocument15 pagesLos Orígenes de La Lexicografía Bilingüe Español-PortuguésYttam BurgaPas encore d'évaluation
- Lago Electromecánica S.A. - Celdas MetálicasDocument6 pagesLago Electromecánica S.A. - Celdas MetálicasMikami Teru100% (1)
- Lineas Capitulo 8Document33 pagesLineas Capitulo 8Carlos Mario LopezPas encore d'évaluation
- Dispositivo de Proteccion Contra SobretensionDocument1 pageDispositivo de Proteccion Contra SobretensionMikami TeruPas encore d'évaluation
- Ley Sobre Postes de Madera y ConcretoDocument23 pagesLey Sobre Postes de Madera y ConcretoJesus Daniel Ccoa SonccoPas encore d'évaluation
- Riesgos Electricos y La Seguridad PublicaDocument83 pagesRiesgos Electricos y La Seguridad PublicaJesus Ernesto Peralta HuasasquichePas encore d'évaluation
- Ejemplo Distrib SecundariaDocument92 pagesEjemplo Distrib SecundariaJean CarlosPas encore d'évaluation
- Reglamento ElectricoDocument27 pagesReglamento Electricorash2767% (3)
- N2XSY 18 30 KVDocument4 pagesN2XSY 18 30 KVMikami TeruPas encore d'évaluation
- Seguridad en Grifos, Estaciones de Servicios y GasocentrosDocument48 pagesSeguridad en Grifos, Estaciones de Servicios y GasocentrosVictor Tito0% (2)
- DISYUNTORDocument19 pagesDISYUNTORJose Carlos Chavez Ñontol100% (1)
- Diseño Mecatronico Tema 1Document63 pagesDiseño Mecatronico Tema 1Rabi SotoPas encore d'évaluation
- Pac T2550Document16 pagesPac T2550laplacexxxPas encore d'évaluation
- Manual de Operación de Las Llenadoras Automáticas de CajasDocument11 pagesManual de Operación de Las Llenadoras Automáticas de CajasFelipe Ojeda FloresPas encore d'évaluation
- Lugeon PaperDocument7 pagesLugeon PaperRoxana Salas HuenchuánPas encore d'évaluation
- Actividad de Laboratorio 2Document6 pagesActividad de Laboratorio 2samantha galiciaPas encore d'évaluation
- Handy Scan RX 1Document2 pagesHandy Scan RX 1carlosPas encore d'évaluation
- Practic As Control 2Document67 pagesPractic As Control 2Aldair FLPas encore d'évaluation
- ATMOS Wave EspañolDocument10 pagesATMOS Wave EspañolRené Mora-CasalPas encore d'évaluation
- Cot - Ventas - 001598 - Apaza Ale Rocio Del PilarDocument12 pagesCot - Ventas - 001598 - Apaza Ale Rocio Del PilarRocio Del PilarPas encore d'évaluation
- Grupo1 Preinf5 PDFDocument3 pagesGrupo1 Preinf5 PDFMariela ZuluagaPas encore d'évaluation
- Programa de La AsignaturaDocument18 pagesPrograma de La AsignaturaEdward De La ValielPas encore d'évaluation
- Lazos de Corriente 4 A 20 MaDocument15 pagesLazos de Corriente 4 A 20 MaJoseph Manuel Chamochumbi IndaraPas encore d'évaluation
- Práctica 3 Potenciómetro y Puente de WheatstoneDocument9 pagesPráctica 3 Potenciómetro y Puente de WheatstoneDaniela Calero RamírezPas encore d'évaluation
- Guias 2012A-Control DigitalDocument13 pagesGuias 2012A-Control DigitalAndres OchoaPas encore d'évaluation
- LabVIEW Core 2 Curso PDFDocument0 pageLabVIEW Core 2 Curso PDFAlejandro Noriega75% (8)
- Silabo 2020 Sensores y TransductoresDocument8 pagesSilabo 2020 Sensores y TransductoresBrianmenPas encore d'évaluation
- Sebastian Duarte - Oscar Rodriguez Lab 1Document16 pagesSebastian Duarte - Oscar Rodriguez Lab 1mohamedPas encore d'évaluation
- Tema 16. Codificación PCM para Ensayos en VueloDocument13 pagesTema 16. Codificación PCM para Ensayos en VueloMiguel Andres PERSONALPas encore d'évaluation
- Tesis Edgar Daniel Martinez RodiguezDocument96 pagesTesis Edgar Daniel Martinez RodiguezJuan NintenPas encore d'évaluation
- Informe Laboratorio Fundamentos de Sensores EléctricosDocument5 pagesInforme Laboratorio Fundamentos de Sensores EléctricosJorge Oswaldo Ibarra ArangoPas encore d'évaluation
- Lab1 Ie S12018Document20 pagesLab1 Ie S12018mohamedPas encore d'évaluation
- Servicio de Análisis de Fluidos en Pruebas de ProducciónDocument5 pagesServicio de Análisis de Fluidos en Pruebas de ProducciónFernando VicencioPas encore d'évaluation
- Diagnostico Del Estado de Motores TrifásicosDocument8 pagesDiagnostico Del Estado de Motores TrifásicosWalter CallePas encore d'évaluation
- Practica 2 - Adquisicion de Datos - Mamani Flores Vladimir GermanDocument6 pagesPractica 2 - Adquisicion de Datos - Mamani Flores Vladimir GermanVLADIMIR GERMAN MAMANI FLORESPas encore d'évaluation
- NRF 105 Pemex 2012Document84 pagesNRF 105 Pemex 2012Luz Mary Lozano Martinez50% (2)
- Sensor EsDocument3 pagesSensor EsVladimir HuayhuaPas encore d'évaluation
- Tren de Aterrizaje700!3!3Document70 pagesTren de Aterrizaje700!3!3juan carlos balderas silvaPas encore d'évaluation
- Sistemas de Control Plataforma Ca-Litoral-ADocument128 pagesSistemas de Control Plataforma Ca-Litoral-AJorge Maldonado Coca100% (1)
- Telemetria de Vuelo Aeroespacial Tésis HEGLDocument50 pagesTelemetria de Vuelo Aeroespacial Tésis HEGLLu HerreraPas encore d'évaluation
- Informe RTD SimulaciónDocument4 pagesInforme RTD SimulaciónAlan RodriguezPas encore d'évaluation