Vous aimerez peut-être aussi
- Dell Case AnalysisDocument3 pagesDell Case AnalysisPankajKumar100% (2)
- High Performance Computing - Project ReportDocument58 pagesHigh Performance Computing - Project ReportShrey Thakur100% (1)
- Motoman hp3jcDocument2 pagesMotoman hp3jcmiguel50% (2)
- Very High-Speed Computing Systems: CompooentsDocument9 pagesVery High-Speed Computing Systems: CompooentsManar JaradatPas encore d'évaluation
- ResumeDocument15 pagesResumedarkdemon007Pas encore d'évaluation
- Formal Requirements For Virtualizable Third Generation ArchitecturesDocument10 pagesFormal Requirements For Virtualizable Third Generation ArchitectureswihuxPas encore d'évaluation
- Distributed Computer Systems: Theory and PracticeD'EverandDistributed Computer Systems: Theory and PracticeÉvaluation : 4 sur 5 étoiles4/5 (1)
- Ntsyspc: User GuideDocument44 pagesNtsyspc: User GuidemiriamvbPas encore d'évaluation
- p31 CrowcroftDocument2 pagesp31 Crowcroftf00k3rPas encore d'évaluation
- References: Computers, Thesis and Component Reuse With VHDLDocument37 pagesReferences: Computers, Thesis and Component Reuse With VHDLDuc Nguyen HoangPas encore d'évaluation
- ALGO p2Document5 pagesALGO p2mustabshirah.nayerPas encore d'évaluation
- Brent Kung Prefix AdderDocument5 pagesBrent Kung Prefix AdderSanary RebelsPas encore d'évaluation
- International Journal of Engineering Issues - Vol 2015 - No 1 - Paper3Document7 pagesInternational Journal of Engineering Issues - Vol 2015 - No 1 - Paper3sophiaPas encore d'évaluation
- Informs Operations Research: This Content Downloaded From 167.249.43.16 On Thu, 04 Oct 2018 18:15:09 UTCDocument9 pagesInforms Operations Research: This Content Downloaded From 167.249.43.16 On Thu, 04 Oct 2018 18:15:09 UTCAndresLugoPas encore d'évaluation
- TowardSmartEmbeddedSystems ASelf AwareSystem On ChipSoCPerspectiveDocument28 pagesTowardSmartEmbeddedSystems ASelf AwareSystem On ChipSoCPerspectiveFoisal AhmedPas encore d'évaluation
- Presentation Topics For Distributed ComputingDocument9 pagesPresentation Topics For Distributed ComputingtamilkudimaganPas encore d'évaluation
- Annotated Source ListDocument16 pagesAnnotated Source Listapi-334517875Pas encore d'évaluation
- The Minimum Worst Case Error of Fuzzy ApproximatorsDocument3 pagesThe Minimum Worst Case Error of Fuzzy ApproximatorsviolinloverkwongPas encore d'évaluation
- Ece-I-Computer Concepts & C Programming (10ccp-13) - NotesDocument105 pagesEce-I-Computer Concepts & C Programming (10ccp-13) - NotesChiranth BOPas encore d'évaluation
- Parallel ProcessingDocument5 pagesParallel ProcessingMustafa Al-NaimiPas encore d'évaluation
- DataIntensive ComputerDocument10 pagesDataIntensive Computerswapnil_022Pas encore d'évaluation
- Concurrent ProgrammingDocument529 pagesConcurrent ProgrammingVarshini Vaithyam100% (2)
- Main Memory: Bibliographical NotesDocument2 pagesMain Memory: Bibliographical NotesTugas UtomoPas encore d'évaluation
- Introduction To Focus Issue: When Machine Learning Meets Complex Systems: Networks, Chaos, and Nonlinear DynamicsDocument9 pagesIntroduction To Focus Issue: When Machine Learning Meets Complex Systems: Networks, Chaos, and Nonlinear DynamicsJules JoePas encore d'évaluation
- Annotated BibliographyDocument2 pagesAnnotated BibliographyaPas encore d'évaluation
- 08REFERENCESDocument6 pages08REFERENCESSaadPas encore d'évaluation
- Modules For Midterm Module 6 (1 Week) A. Course ContentDocument5 pagesModules For Midterm Module 6 (1 Week) A. Course ContentRichard BraceroPas encore d'évaluation
- Biologically-Inspired Massively-Parallel Architectures - Computing Beyond A Million ProcessorsDocument10 pagesBiologically-Inspired Massively-Parallel Architectures - Computing Beyond A Million Processorsscribd23807Pas encore d'évaluation
- Cognitive Process-Based Research Support SystemDocument8 pagesCognitive Process-Based Research Support SystemKarolina ChavezPas encore d'évaluation
- Lect 01Document21 pagesLect 01Arun SharmaPas encore d'évaluation
- Nts Ys GuideDocument37 pagesNts Ys GuidetixaallenPas encore d'évaluation
- CS TR 77 611Document89 pagesCS TR 77 611Syed AleemPas encore d'évaluation
- Emergent Computation.: Physica D 42 (1990) 1-11 North-HollandDocument11 pagesEmergent Computation.: Physica D 42 (1990) 1-11 North-HollandrezapouPas encore d'évaluation
- Springer Book 1Document24 pagesSpringer Book 1luis pero no tomlinson en youtubePas encore d'évaluation
- Parallel Distributed Processing Explorations in The Microstructure of CognitionDocument39 pagesParallel Distributed Processing Explorations in The Microstructure of CognitioncleatushorsePas encore d'évaluation
- WhatisComputationTheComputerJournal 2012 Denning 805 10Document6 pagesWhatisComputationTheComputerJournal 2012 Denning 805 10Akinwale Walexkino AwoyelePas encore d'évaluation
- Stefano Markidis, Erwin Laure - Solving Software Challenges For Exascale 2015Document154 pagesStefano Markidis, Erwin Laure - Solving Software Challenges For Exascale 2015Nguyen Thanh BinhPas encore d'évaluation
- Optimization in Engineering DesignDocument13 pagesOptimization in Engineering DesignCoPas encore d'évaluation
- Opcode: Machine CodeDocument4 pagesOpcode: Machine CodejoPas encore d'évaluation
- International Journal of Computational Engineering Research (IJCER)Document6 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)Pas encore d'évaluation
- SC Industrial ApplicationsDocument23 pagesSC Industrial ApplicationsNathan MalonePas encore d'évaluation
- ch06 PDFDocument10 pagesch06 PDFUtsab RautPas encore d'évaluation
- ch06 PDFDocument10 pagesch06 PDFUtsab RautPas encore d'évaluation
- Gerovitch AutomationDocument6 pagesGerovitch AutomationAshika ChourasiaPas encore d'évaluation
- 762 Ieee Transactions On Systems, Man, and Cybernetics-Part A: Systems and Humans, Vol. 31, No. 6, November 2001Document6 pages762 Ieee Transactions On Systems, Man, and Cybernetics-Part A: Systems and Humans, Vol. 31, No. 6, November 2001Sachin ShendePas encore d'évaluation
- Towards Chip-on-Chip NeuroscienceDocument10 pagesTowards Chip-on-Chip NeuroscienceVictornyc01Pas encore d'évaluation
- Collating Techniques of Computational Intelligence Paradigms: An Ingenious ApproachDocument5 pagesCollating Techniques of Computational Intelligence Paradigms: An Ingenious ApproachInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Distributed CountingDocument128 pagesDistributed CountingMandeep GillPas encore d'évaluation
- "Encoding Trees," Comput.: 1I15. New (71Document5 pages"Encoding Trees," Comput.: 1I15. New (71Jamilson DantasPas encore d'évaluation
- Could A Neuroscientist Understand A MicroprocessorDocument15 pagesCould A Neuroscientist Understand A MicroprocessorHenrique JesusPas encore d'évaluation
- Computer Organization Paper ProjectDocument14 pagesComputer Organization Paper Projectapi-690889230Pas encore d'évaluation
- Computational Validation and Analysis of Semi-Quantitative Data Using In-Silico ApproachesDocument5 pagesComputational Validation and Analysis of Semi-Quantitative Data Using In-Silico ApproachesIJAR JOURNALPas encore d'évaluation
- DD14 ProceedingsDocument506 pagesDD14 ProceedingsJaimePas encore d'évaluation
- Mivar NETs and logical inference with the linear complexityD'EverandMivar NETs and logical inference with the linear complexityPas encore d'évaluation
- Designing Software For Ease of Extension and ContractionDocument10 pagesDesigning Software For Ease of Extension and Contractiondennis jutemarkPas encore d'évaluation
- Critique PaperDocument8 pagesCritique PaperMarie Aizelle Pacer BorjaPas encore d'évaluation
- DNA StructueDocument74 pagesDNA StructueNeha VermaPas encore d'évaluation
- Parallel Computig AssignmentDocument15 pagesParallel Computig AssignmentAnkitmauryaPas encore d'évaluation
- Data-Intensive Supercomputing: The Case For DISC: Randal E. BryantDocument22 pagesData-Intensive Supercomputing: The Case For DISC: Randal E. BryantpahninPas encore d'évaluation
- PDFDocument17 pagesPDFAmrik SinghPas encore d'évaluation
- Inside Discrete-Event Simulation Software: How It Works and Why It MattersDocument15 pagesInside Discrete-Event Simulation Software: How It Works and Why It MattersDejan DraganPas encore d'évaluation
- The Swift Programming LanguageDocument531 pagesThe Swift Programming LanguageAhmet Hatixhe MorinaPas encore d'évaluation
- 715G8709+SSB+ +u708 - U701 Sy8366qnc - U707 Sy8089a - U706 Sy8368q - U705 RT8079ZQ - U710 G5725adj - U702 G5719T - U709 G5725adj - U704 G9661Document2 pages715G8709+SSB+ +u708 - U701 Sy8366qnc - U707 Sy8089a - U706 Sy8368q - U705 RT8079ZQ - U710 G5725adj - U702 G5719T - U709 G5725adj - U704 G9661Jefferson LeitePas encore d'évaluation
- Proteus TutorialDocument23 pagesProteus TutorialEnrique GarcésPas encore d'évaluation
- AWSome Day - EN 2Document34 pagesAWSome Day - EN 2Shad SaleemPas encore d'évaluation
- SYSDESKDocument4 pagesSYSDESKapi-72678201Pas encore d'évaluation
- SF-104474-CD-20 Onload User GuideDocument265 pagesSF-104474-CD-20 Onload User GuideTerryPas encore d'évaluation
- Switch Password RecoveryDocument3 pagesSwitch Password RecoveryBao JenningsPas encore d'évaluation
- Guides, Tutorials and Links: Android Crash Course by Kevin McmahonDocument12 pagesGuides, Tutorials and Links: Android Crash Course by Kevin McmahonswoneraPas encore d'évaluation
- Isl9r3060g2 F085 DDocument7 pagesIsl9r3060g2 F085 DRemy MendozaPas encore d'évaluation
- 808D ADV Diagnostics Man 1218 en-USDocument600 pages808D ADV Diagnostics Man 1218 en-USalexandrePas encore d'évaluation
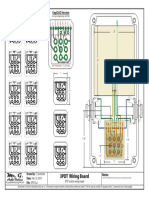
- 3PDT 5 PDFDocument1 page3PDT 5 PDFJaime ZoroPas encore d'évaluation
- BMC Remedy IT Service Management - ITSM Notification EngineDocument46 pagesBMC Remedy IT Service Management - ITSM Notification EnginepisofPas encore d'évaluation
- ARM Cortex-A12 Block DiagramDocument1 pageARM Cortex-A12 Block Diagram文帅宋Pas encore d'évaluation
- Node FS Module Collate 030421Document925 pagesNode FS Module Collate 030421TiniPas encore d'évaluation
- Cloud ComputingDocument39 pagesCloud Computinggmurugananth100% (1)
- EE282 Final Exam: SolutionsDocument9 pagesEE282 Final Exam: SolutionsEAGLEFORCE06Pas encore d'évaluation
- ELS 10 Agustus 2022Document15 pagesELS 10 Agustus 2022Rollannirki RummahorboPas encore d'évaluation
- Automation Interface User GuideDocument149 pagesAutomation Interface User GuideTechne PhobosPas encore d'évaluation
- Symantec Endpoint Protection Manager System RequirementsDocument4 pagesSymantec Endpoint Protection Manager System Requirementssamirdas_hydPas encore d'évaluation
- 1454086530674114562Document82 pages1454086530674114562mgscrkPas encore d'évaluation
- Broadcast Equipment Radio EditedDocument35 pagesBroadcast Equipment Radio EditedMBURU MARTIN KARIUKIPas encore d'évaluation
- Computer Applications Vol - 1 EM - WWW - Governmentexams.co - inDocument272 pagesComputer Applications Vol - 1 EM - WWW - Governmentexams.co - insanPas encore d'évaluation
- Control Unit Cerberus FIT FC360 - Addressable Fire Control PanelsDocument2 pagesControl Unit Cerberus FIT FC360 - Addressable Fire Control PanelsMarco LaanPas encore d'évaluation
- Unit2 - CPU SchedulingDocument84 pagesUnit2 - CPU Schedulingkaushik prajapatiPas encore d'évaluation
- Input Module CP E16Document6 pagesInput Module CP E16Dejan Dunđa JankovPas encore d'évaluation
- 24 - Logic Gates and Truth TablesDocument21 pages24 - Logic Gates and Truth Tablesnandha87Pas encore d'évaluation
- Cisco SD-WAN Extranet VPN LabDocument24 pagesCisco SD-WAN Extranet VPN LabShashank TripathiPas encore d'évaluation
- BL20 User ManualDocument284 pagesBL20 User Manuallazar.bulovanPas encore d'évaluation